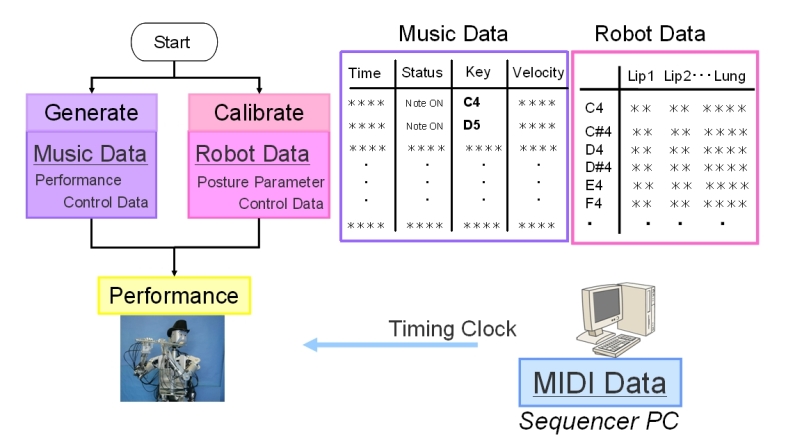
人間形フルート演奏ロボットWF-4Rは,伴奏用MIDIデータの出力を行うMIDIコントロールパソコンとロボット制御用パソコンにより演奏を行っております.MIDIコントロールパソコンはMIDI音源への伴奏データを出力し,MIDI信号のタイミングクロックに同期してロボット制御パソコンがロボットの制御を行います.ロボット制御パソコンはロボットデータとミュージックデータと呼んでいる2種類のデータを利用して演奏を行います.ミュージックデータとはロボット用の楽譜にあたり,ロボットデータは各音名に対するロボットの制御パラメータが記録されています.
| Copyright (c) 2005-2006 Team FLUTE / Takanishi Laboratory |
| All rights reserved. |
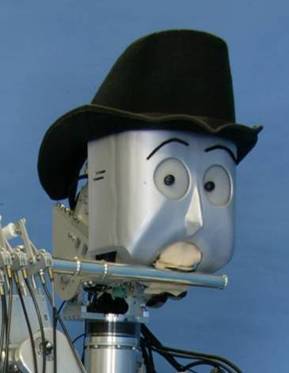
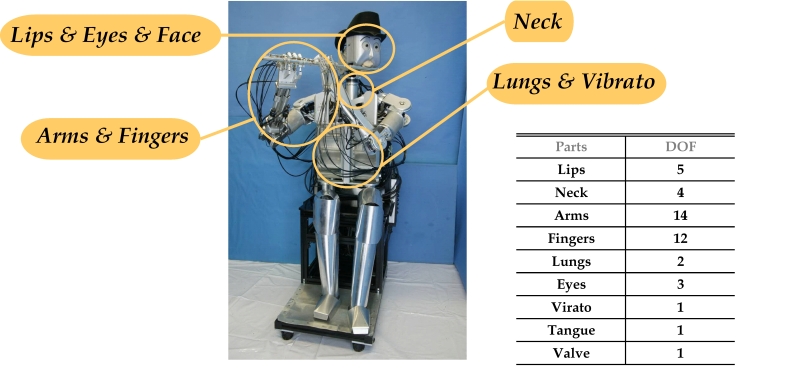
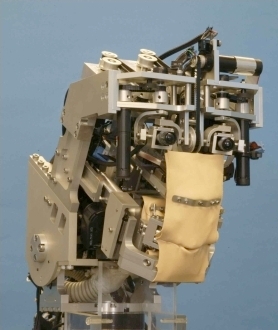
口唇部はフルートの吹鳴音に最も影響があります.唇の素材に低弾性ゴムを使い,それを変形させることでフルートに送り込む空気ビーム形状を制御します.また舌によるタンギングは,腔内部にあるゲル部材をカムによって水平移動させて行っています.
眼部はカメラが搭載されており共演者とのインタラクションを目指します.
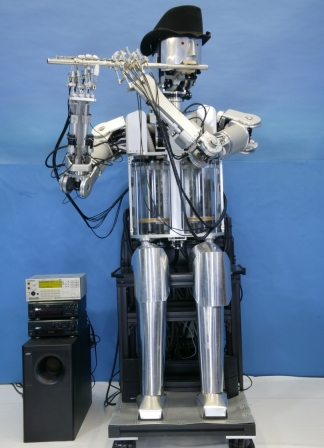
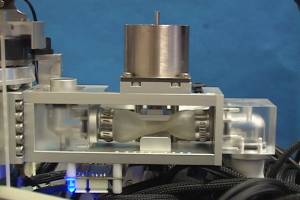
肺は人間のように左右にわかれており、2つのベーンで構成されています.空気はベーンを回転させることで送り出します。ベーンを用いた機構により、吸気時のメカニカルノイズの低減を実現しました.
肺から押し出された空気はヴィブラート機構部に入ります.このヴィブラート機構部により肺から押し出された空気に変化をつけ,ヴィブラート奏法を行います.
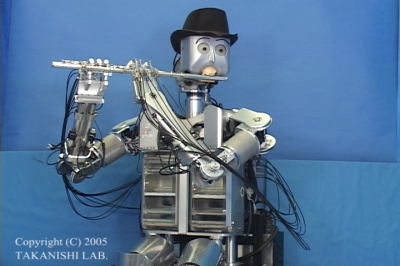
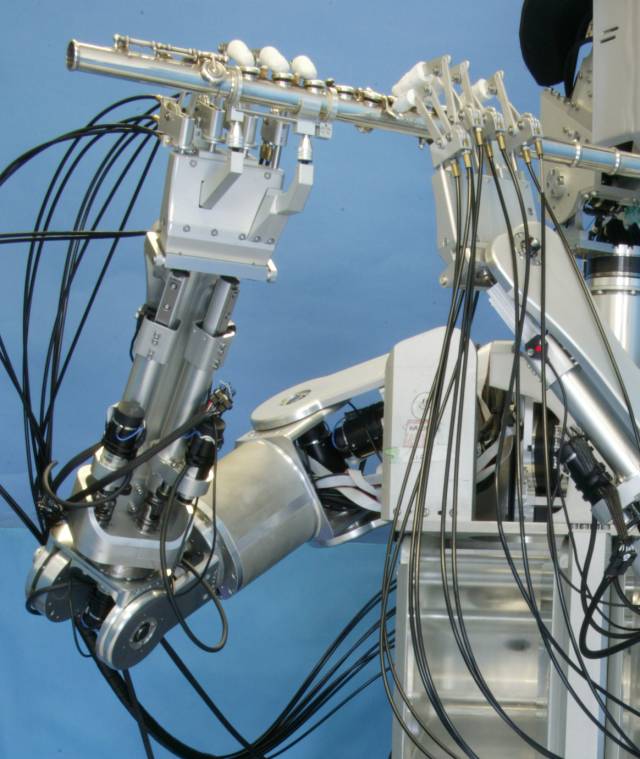
指部は1秒間に8回の開閉動作を行う高速な指使いにより,トリル奏法が可能です.また、フルートは精密チャックによって右手にしっかり固定されており、安定して演奏することができます..
腕部は7自由度で構成されており,口唇部に対して歌口の位置を高精度に制御することが可能です.
視覚デバイスの搭載に伴い,共演者や観客とより親しみやすいように,デザインの顔になっています.眉部はマグネットでできているため,自由に変形させることができ,曲に合わせた表情つくりが可能となっています.
Movie:Composed by N.A.Rimsky-Korsakov
本研究は早稲田大学ヒューマノイド研究所のもとで,岐阜県からの委託であるWABOT-HOUSEプロジェクトにより行われました.ここに感謝の意を表します.
首部は,上下ピッチ,ヨー,ロールの4自由度で構成されています.首部はフルートを演奏するために,高精度で広範囲にわたる口唇部の姿勢制御をしなくてはなりませんが,ハーモニックドライブギアを用いてそれを実現しました.
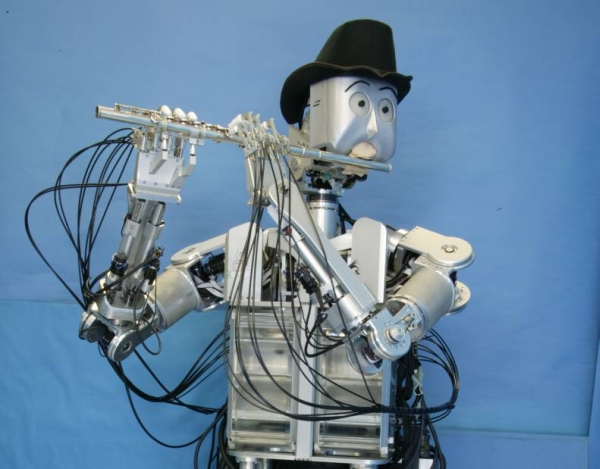
2005年に開発した人間形フルート演奏ロボットWF-4RII(Waseda Flutist No.4 Refined II)は,フルート演奏に必要な人体各器官の機能を再現した各部機構を備えており,全43自由度で構成されています.




高西研究室では,人の心身のメカニズムを追及し,人間とロボットの共生を目指してヒューマノイドロボットの研究開発を行っています.その中で人間と情緒あるいは感性レベルでの交流ができることは,ヒューマノイドロボットにおける重要な機能のひとつであると考えています.そこで私たちはそのような場としての音楽空間に着目し,人間形フルート演奏ロボットの開発を行っています.
本ロボットは,フルート演奏時における人体各器官の働きを機械モデルで再現することで,人間のフルート演奏のメカニズム,表現力の高い演奏手法,および人間とロボットとの音楽空間におけるインタラクションを工学的視点に立って追求し,音楽を通じて人々に感動を与えることを目的としています.
人間形フルート演奏ロボットの研究は1990年に開始され,フルート演奏におけるさまざまな器官の働きを模擬した機械ハードウェアの開発と,MIDI伴奏同期システムの構築を行い,これまでにWFシリーズとして4体の人間形フルート演奏ロボットを開発してきました.また,プロフルート奏者の若松久仁光氏をテクニカルアドバイザーに迎え,演奏の表現力向上とロボットの自律性の向上を目指した,フルート吹鳴音の自律探索の研究や,人間を模倣した演奏に関する研究,また人間とロボットのインタラクションに関する研究を行っています.
| I. Objective | ||
| II. About WF-4RII | ||
| III. Performance system | ||
| IV. Performance movie | ||
| V. Special thanks |
||
| Musical performance activities | ||
| Paper page |
Anthropomorphic Flutist Robot WF-4RII Japanese Page