Takanishi Lab., WASEDA University
Japanese
Development of Disaster Response Robot for Extreme Environment


Robot System
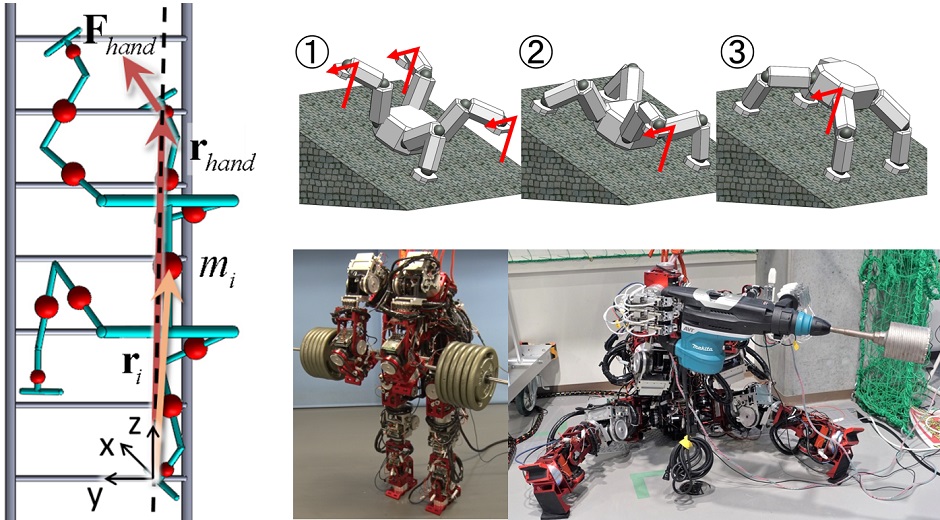
Locomotion Styles & Manipulation

Achievements & Acknowledgements

Objective
The recovery work and field survey in a disaster site are required because disasters such as earthquakes and floods are occurring around the world. It is necessary to investigate damage situation and recovery work. Seeing from the viewpoint of sencondary disasters prevention and reduction of the workload, therefore, there are increasing demands for robots that are able to do recovery work instead of human.
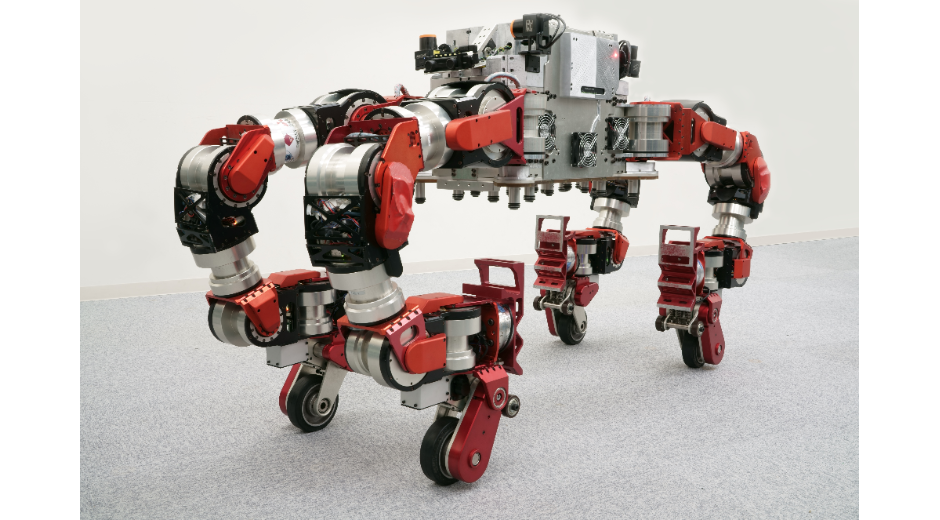
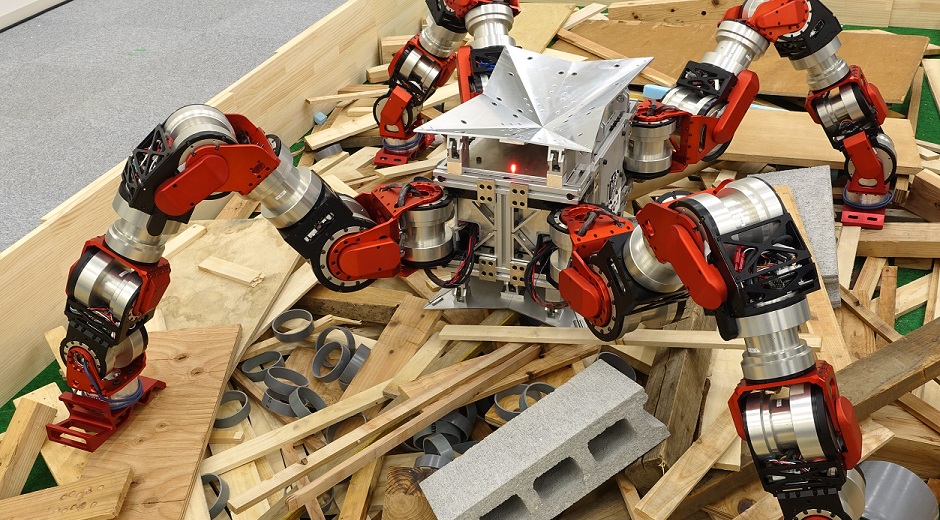
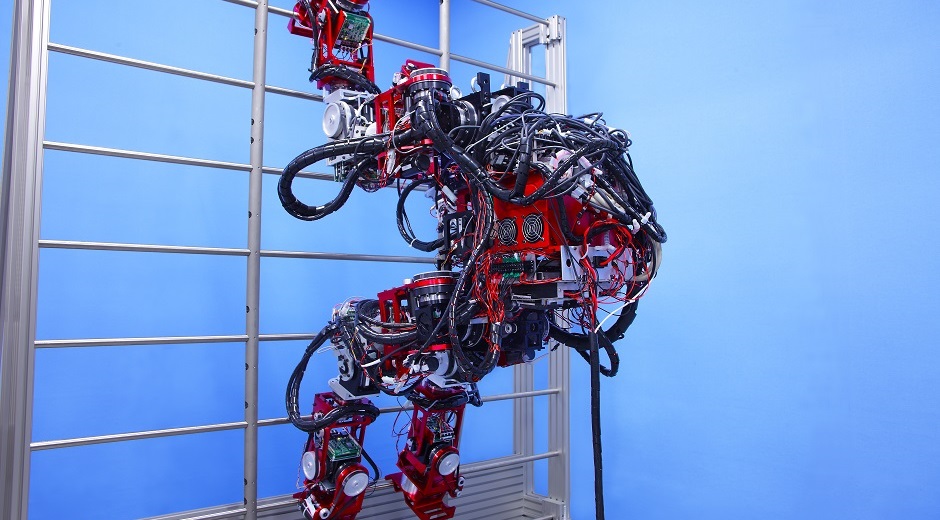
This laboratory develops a robot platform in ImPACT project initiated by Cabinet Office, Japanese Government. This research develops a four-limbed robot that can perform locomotion styles such as biped walking, quadruped walking, crawling and so on. Therefore, the robot can move on narrow areas and uneven ground. The long-term goal of our research is the development of the robot with high accessibility in extreme environment and the capability of choosing the proper locomotion style according to different situations.
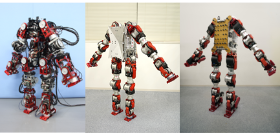
 Concept of the four-limbed robot
Concept of the four-limbed robot