

ロボットシステム
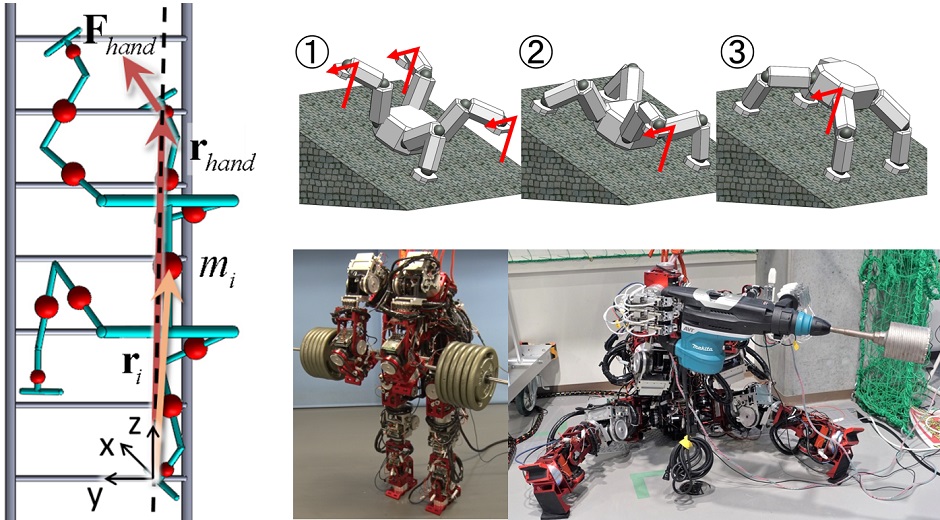
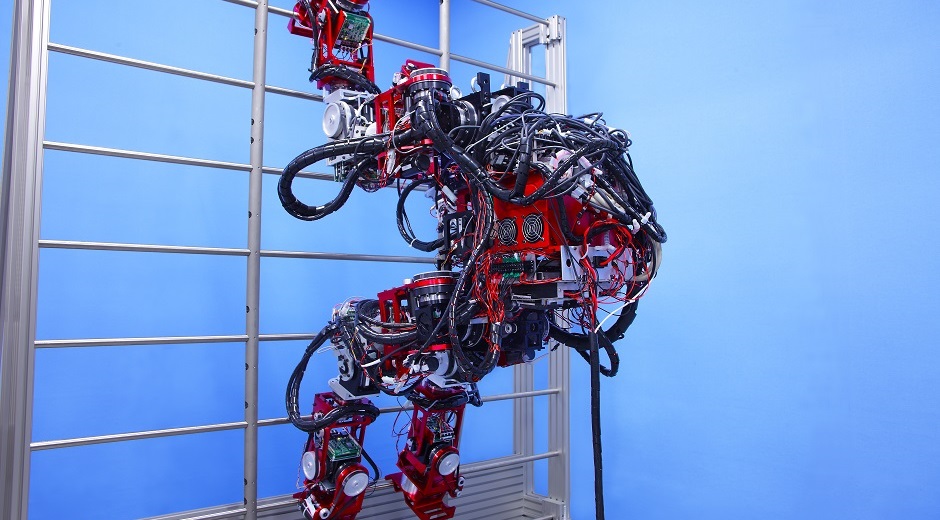
様々な移動様式と作業の実現

研究業績・謝辞

研究の目的と概要
近年,世界中の様々な地域で地震や津波など多くの災害が発生しています.災害発生時には現場の被害状況の調査や復旧作業が必要になります.そのため,このような環境下では二次災害の防止や作業負担の軽減などの観点から人間に代わって作業できるロボットを使用することが有効であると考えられます.
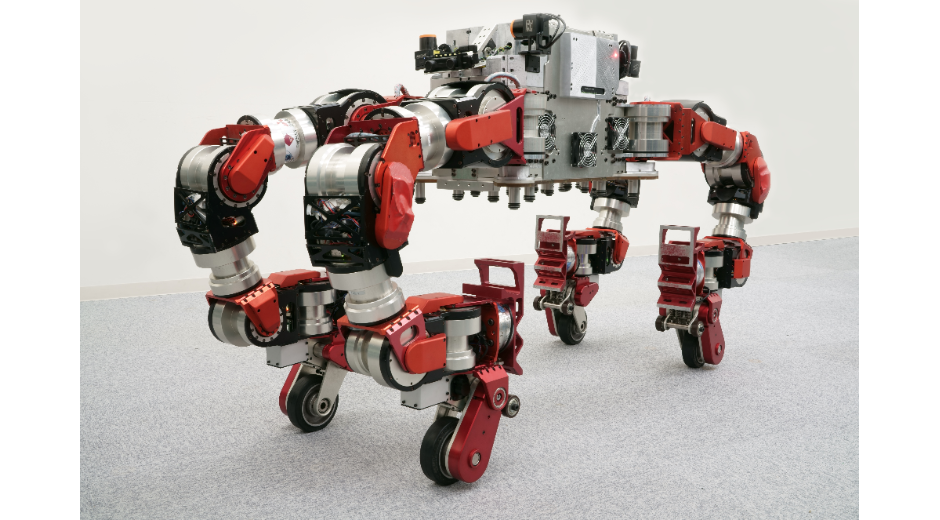
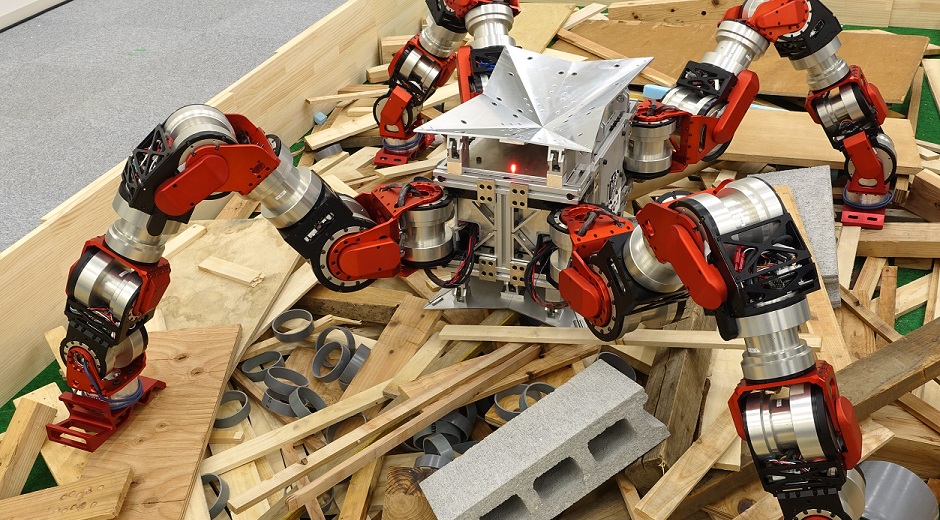
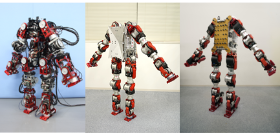
そこで本研究室では,内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)「タフ・ロボティクス・チャレンジ」の一環として脚ロボットのプラットフォームの開発を担当しています.研究としては移動のための脚を有し2足歩行や4足歩行,あるいは胴体を接地させた腹ばい移動など複数の移動様式を有することで,狭隘部の通過や不整地での安定移動などさまざまな状況に対応しやすい多様なロコモーションを実現し,極限環境に対して高いアクセシビリティを有する4肢ロボットの開発を目指しています.
 4肢ロボットのコンセプト
4肢ロボットのコンセプト