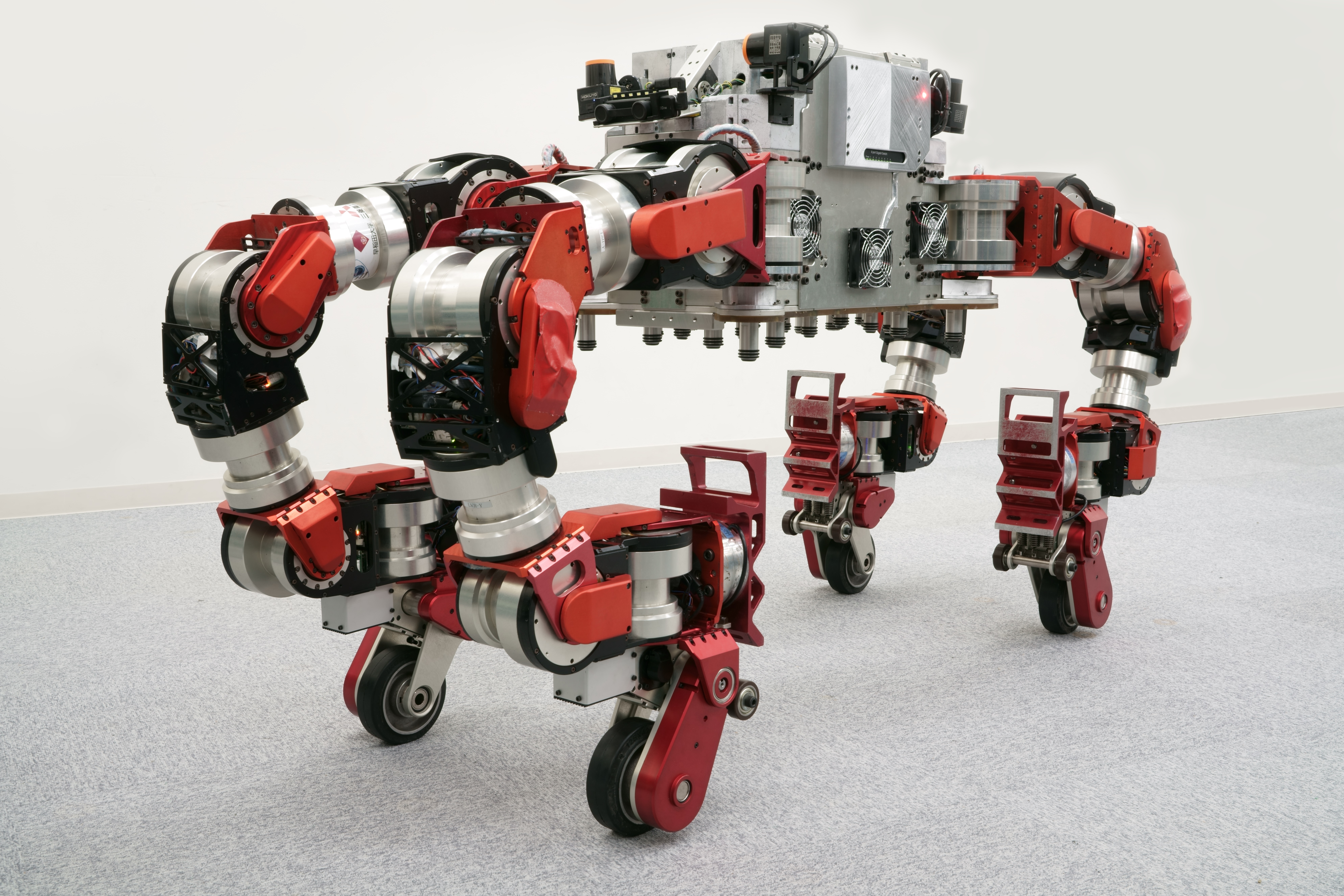
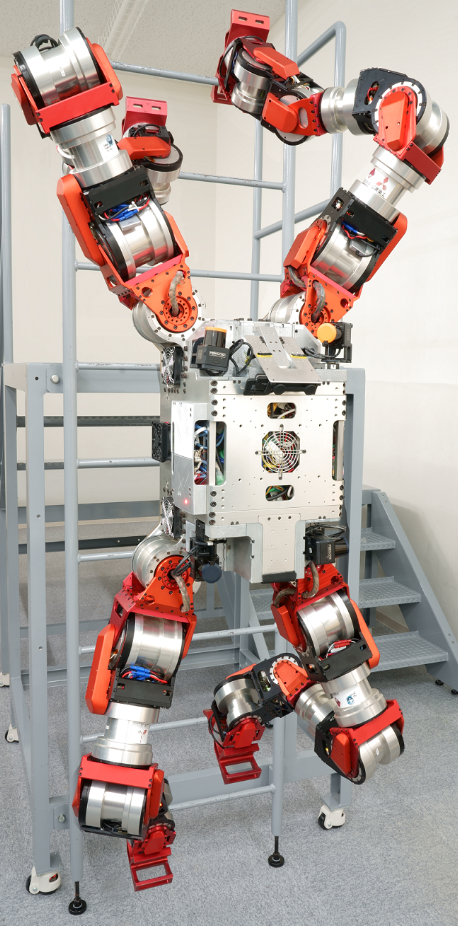
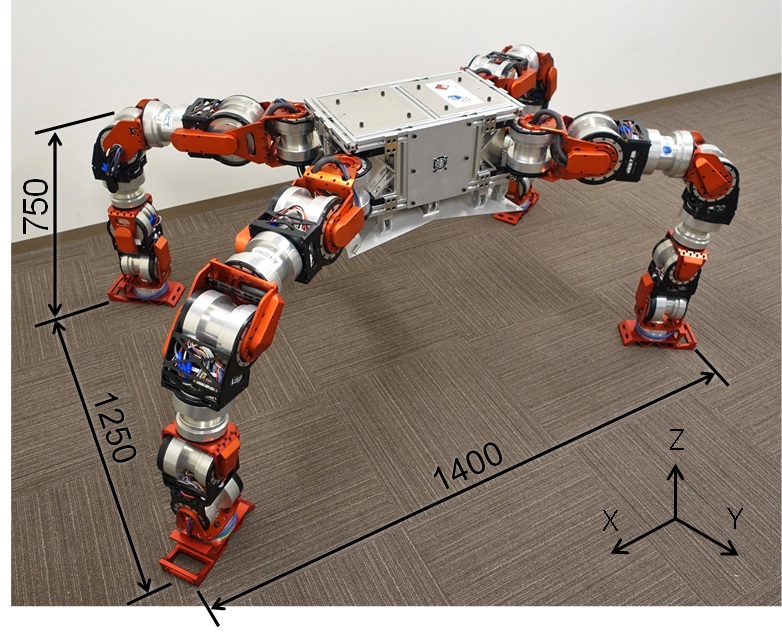
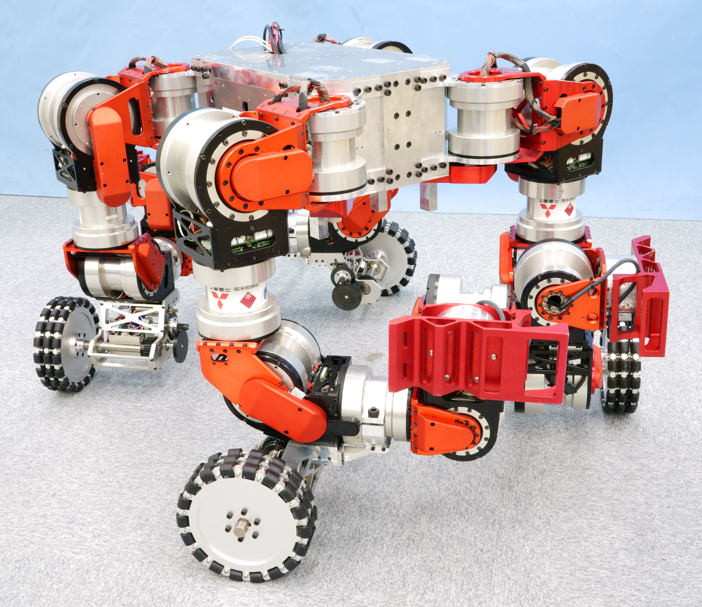
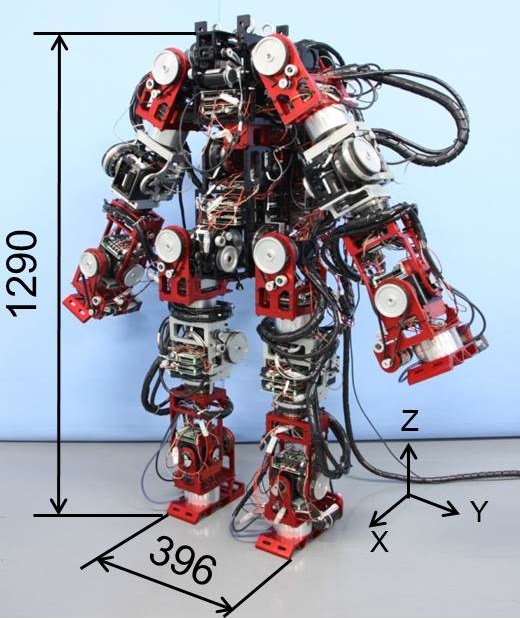
WAREC-1R (2019-)
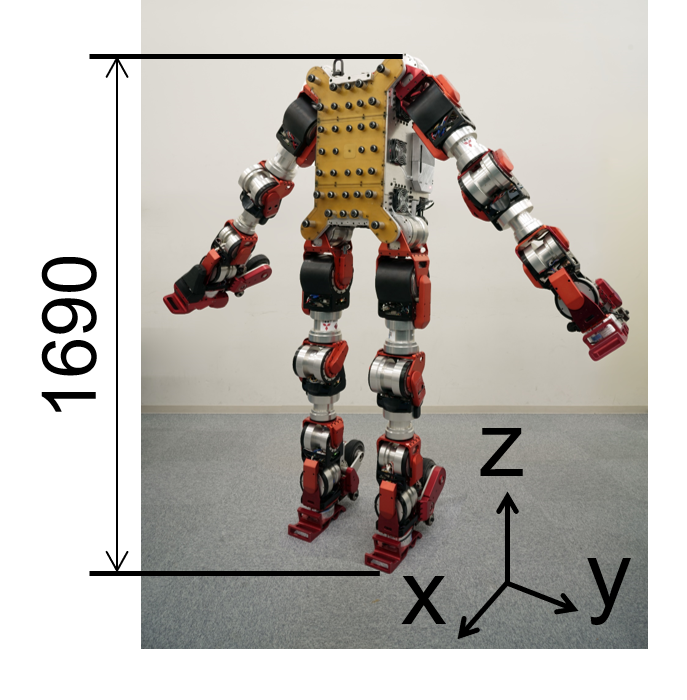
WAREC-1Rは従来機であるWAREC-1をベースに,実運用に向けて再設計した機構を搭載したロボットです.4肢に車輪機構とエンドエフェクタを搭載し,車輪走行によるより高速な平地移動や,指先自由度による細かなマニピュレーション動作を実現させました.また,胴体機構内部にリチウムイオン電池と無線LAN中継器を搭載し,ケーブルレスでの運用が可能となりました.
WAREC-1R
(WAseda REsCuer-No.1 Refined)
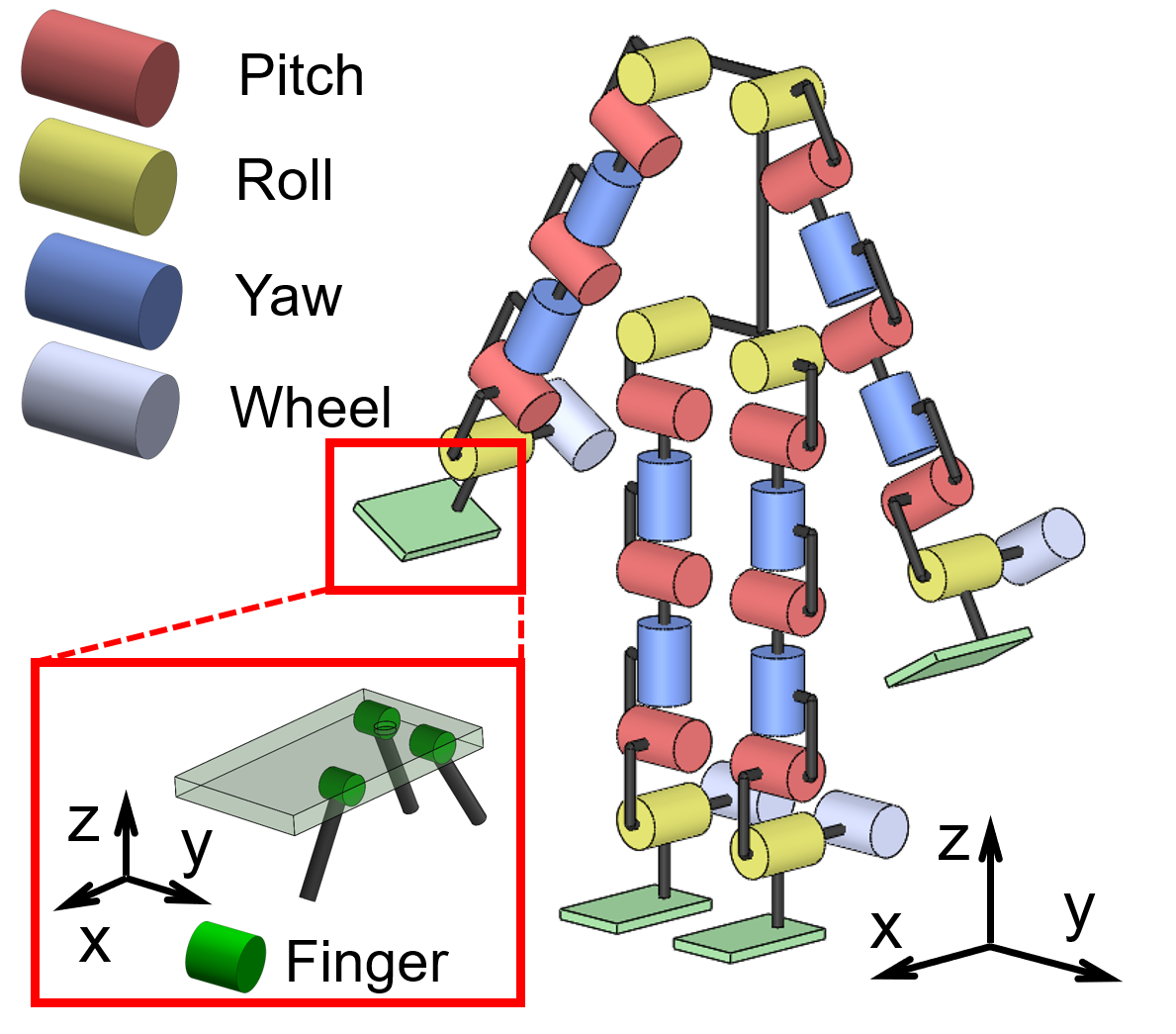
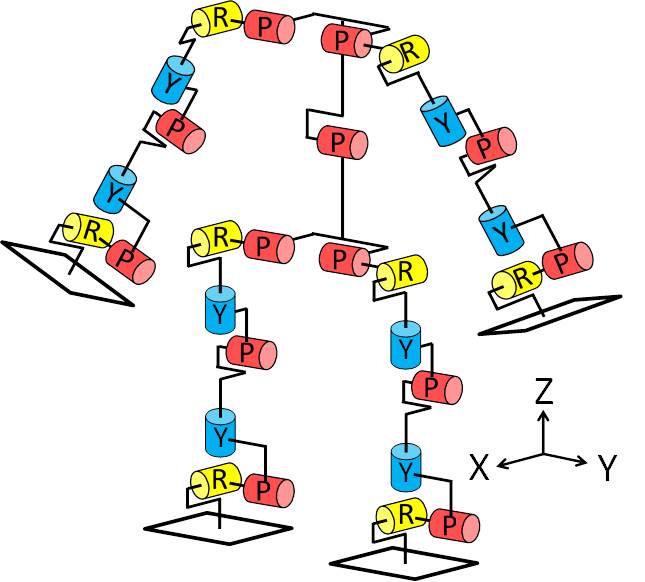
自由度配置図
WAREC-1R 諸元
| 自由度 |
肩・股関節:3自由度 x 4肢 肘・膝関節:3自由度 x 4肢 手・足関節:3自由度 x 4肢 車輪機構:1自由度 x 4肢 エンドエフェクタ:3自由度 x 1肢 |
|---|---|
|
車輪機構搭載時合計:32自由度 エンドエフェクタ搭載時合計:31自由度 全機構搭載時合計:35自由度 |
|
| センサ |
6軸力覚センサ IMU 測域センサアレイ ステレオカメラ |
| アクチュエータ |
アクチュエータユニット : DCブラシレスモータ 車輪機構 : DCブラシレスモータ エンドエフェクタ : DCモータ |
| 質量[kg] | 179 (バッテリ質量込み) |
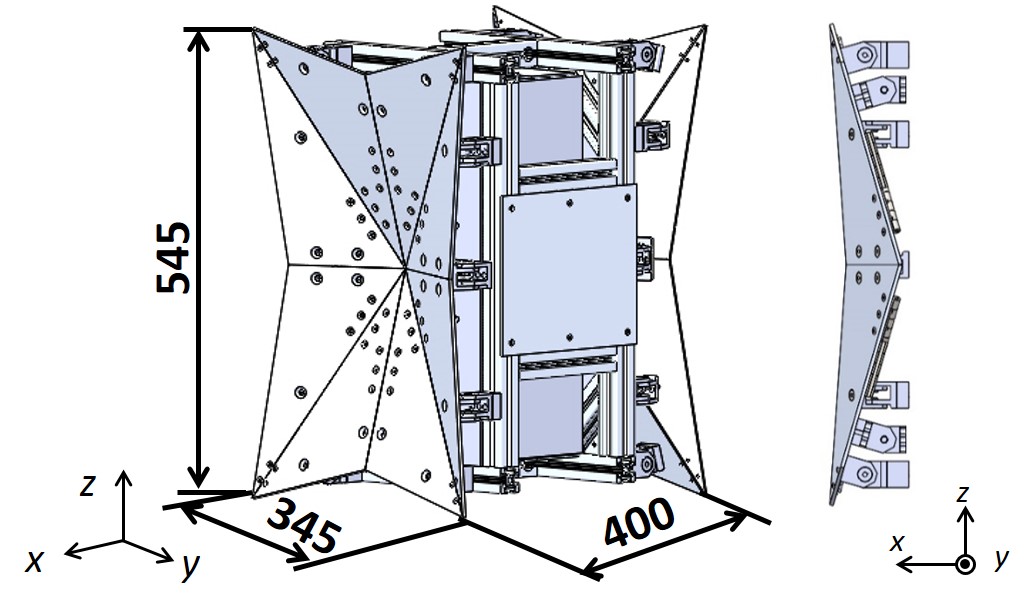
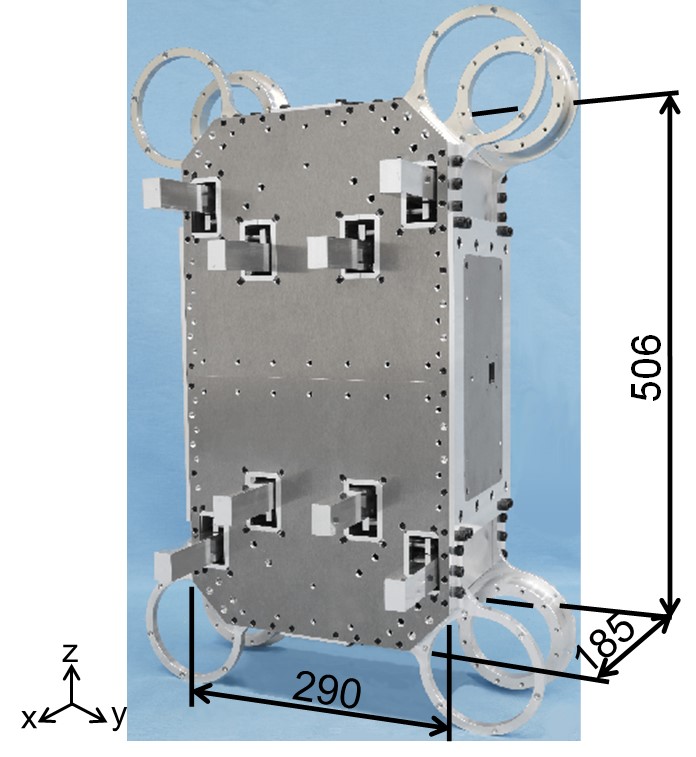
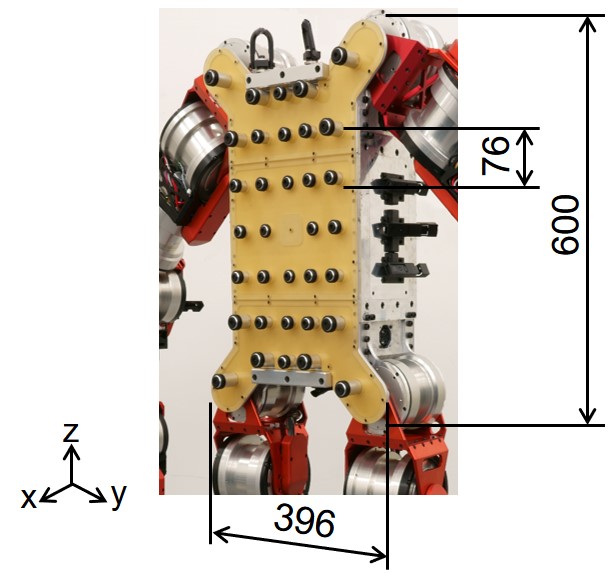
■ ケーブルレス運用に向けたバッテリ,無線機器搭載胴体
従来機であるWAREC-1では,電源線・通信線は有線接続のみの運用しかできませんでした.そのため,WAREC-1Rの胴体機構にはリチウムイオン電池と無線LAN中継器を搭載し,ケーブルレスでの運用が可能となりました.電池や無線LAN中継器,環境認識センサなどの搭載物の増加に伴い,胴体機構の内部の空間を拡張して無駄なく利用できるような配置,およびセンサ認識範囲との干渉を減らすような外装を設計・製作しました.
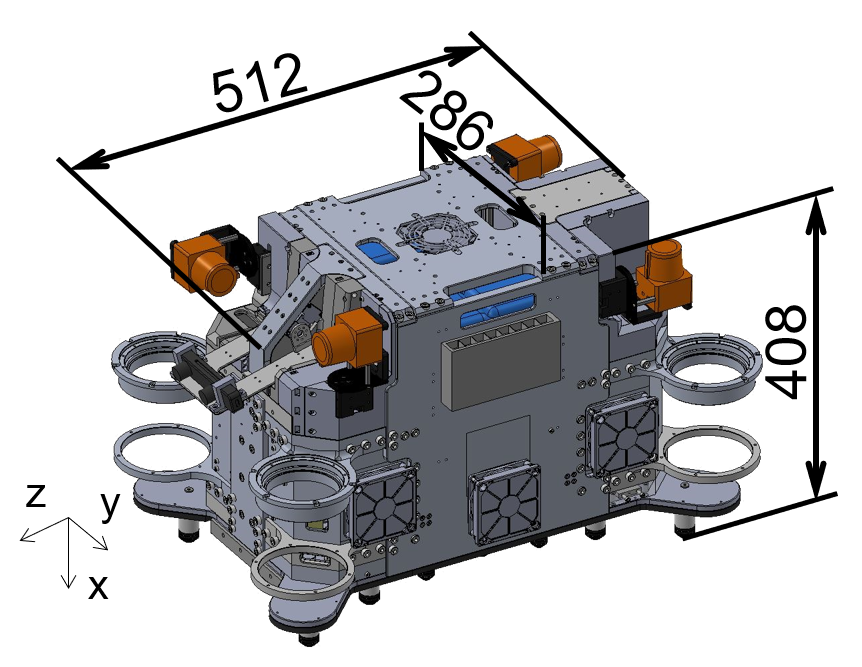
胴体部寸法
電源系統諸元
| 項目 | 駆動系統 | 制御系統 | |
|---|---|---|---|
| バッテリ | バッテリ種類 | リチウムイオンポリマ電池 |
|
| 定格電圧[V] | 66.6 | 22.2 | |
| 定格容量[Ah] | 22 | 44 | |
| 電源出力 (整流後) |
出力電圧[V] | 60 | 24 |
| 連続電流[A] | 33 | 20 | |
[関連論文]
・寺江航汰,松原孝将,橋本健二,久保田直行,並木明夫,孫瀟,松澤貴司,今井朝輝,大河原正篤,木村駿介,熊谷健吾,山口航希,内藤博,名村圭祐,佐藤丈弘,村上将嗣,吉田駿也,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第27報:バッテリ内蔵,無線化およびマルチセンサシステムの運用が可能な胴体機構),”第37回日本ロボット学会学術講演会予稿集,1G2-01,東京都,2019年9月.
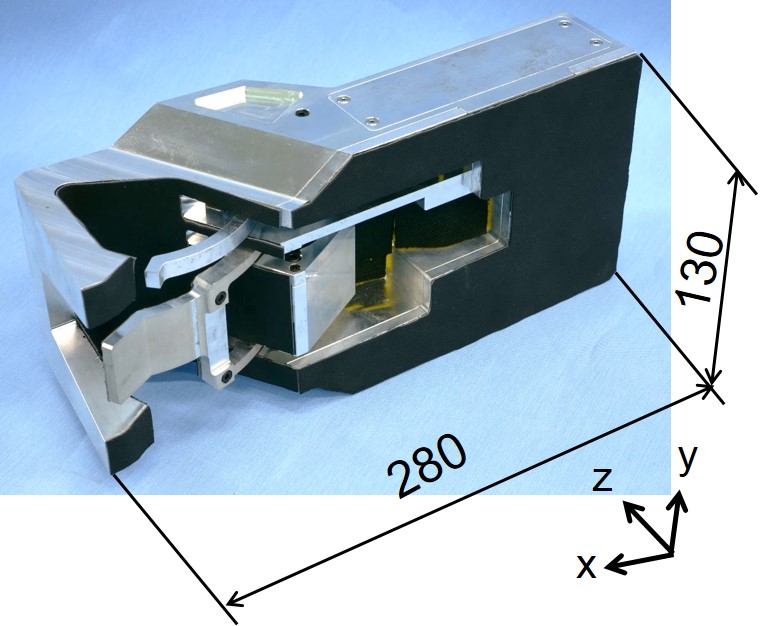
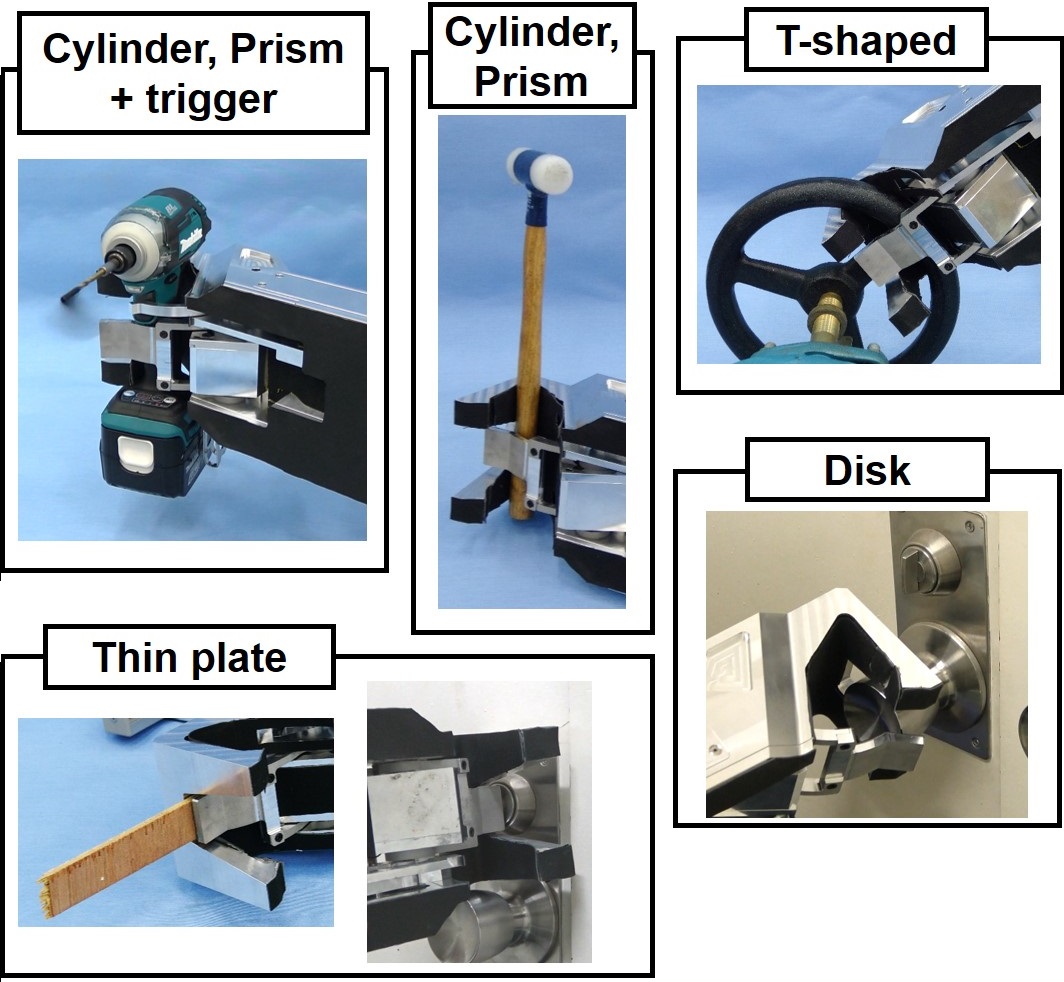
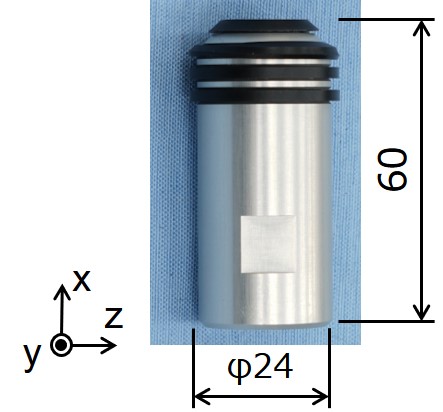
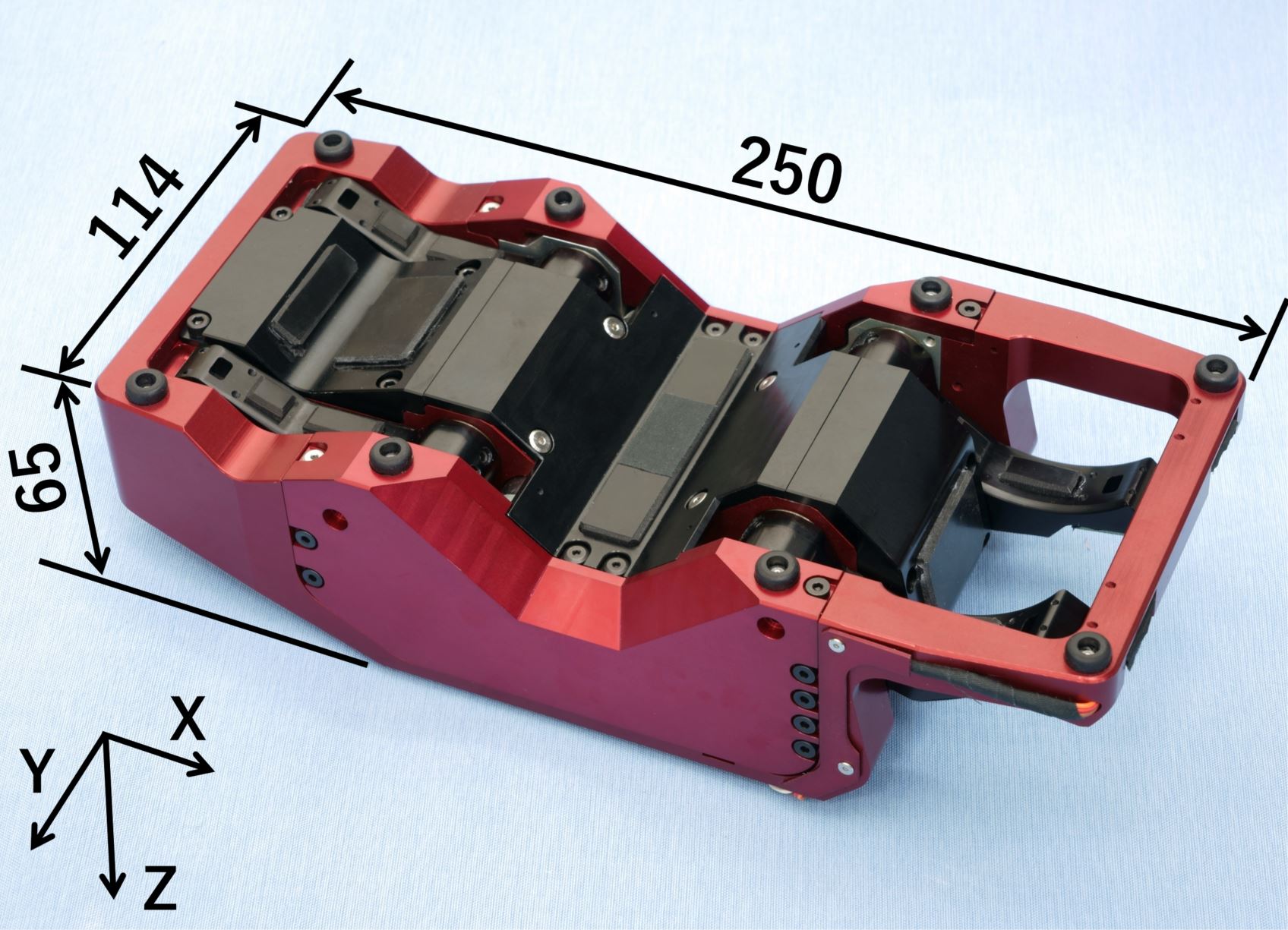
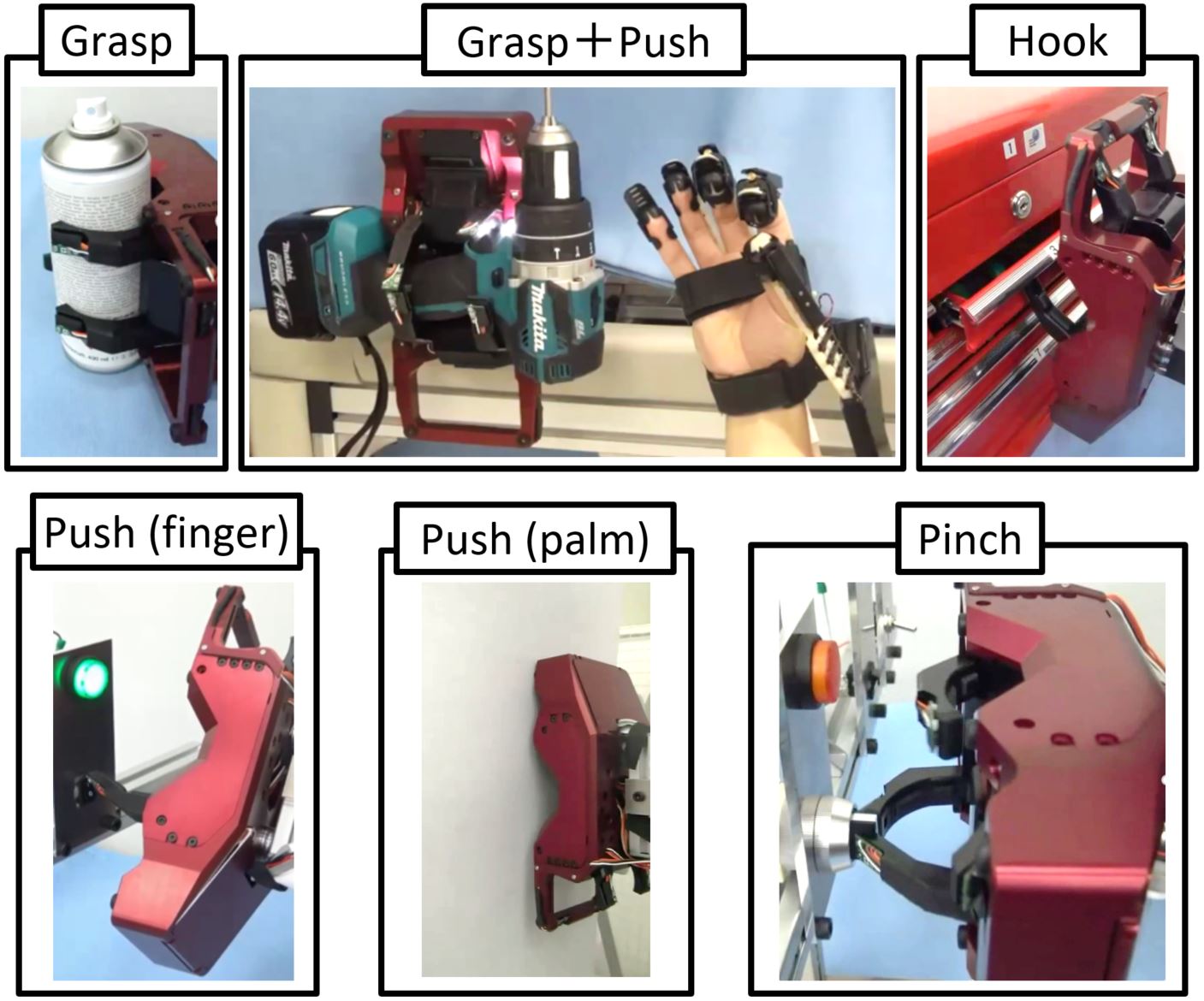
■ 多様な移動様式と指先での作業に対応したエンドエフェクタ
WAREC-1Rの多様な移動様式に対応可能かつ高い指先作業性と許容外力を有するエンドエフェクタを開発しました.作業対象物に適した指形状によって,多様なスイッチとバルブの操作,そして,極限環境下に対応した工具操作を実現しました.
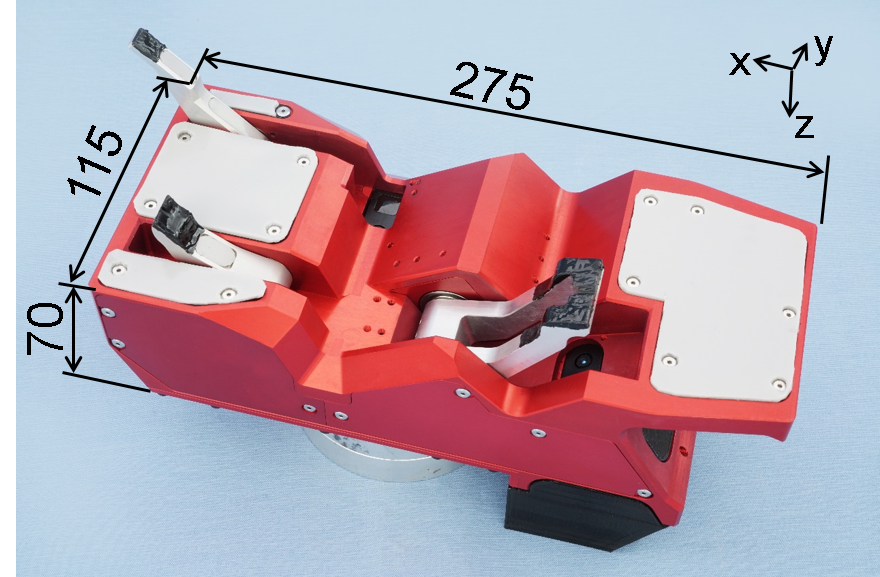
エンドエフェクタ寸法
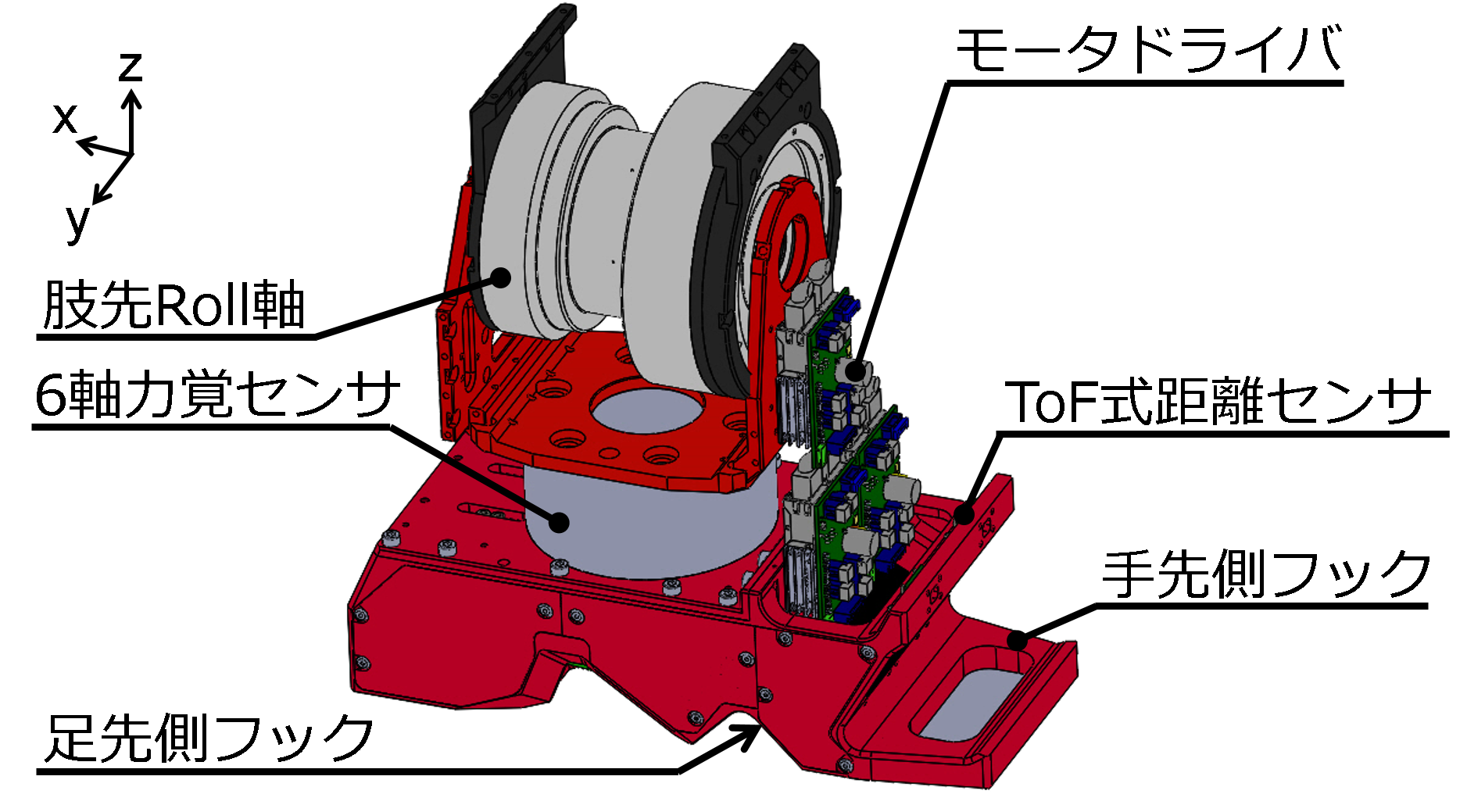
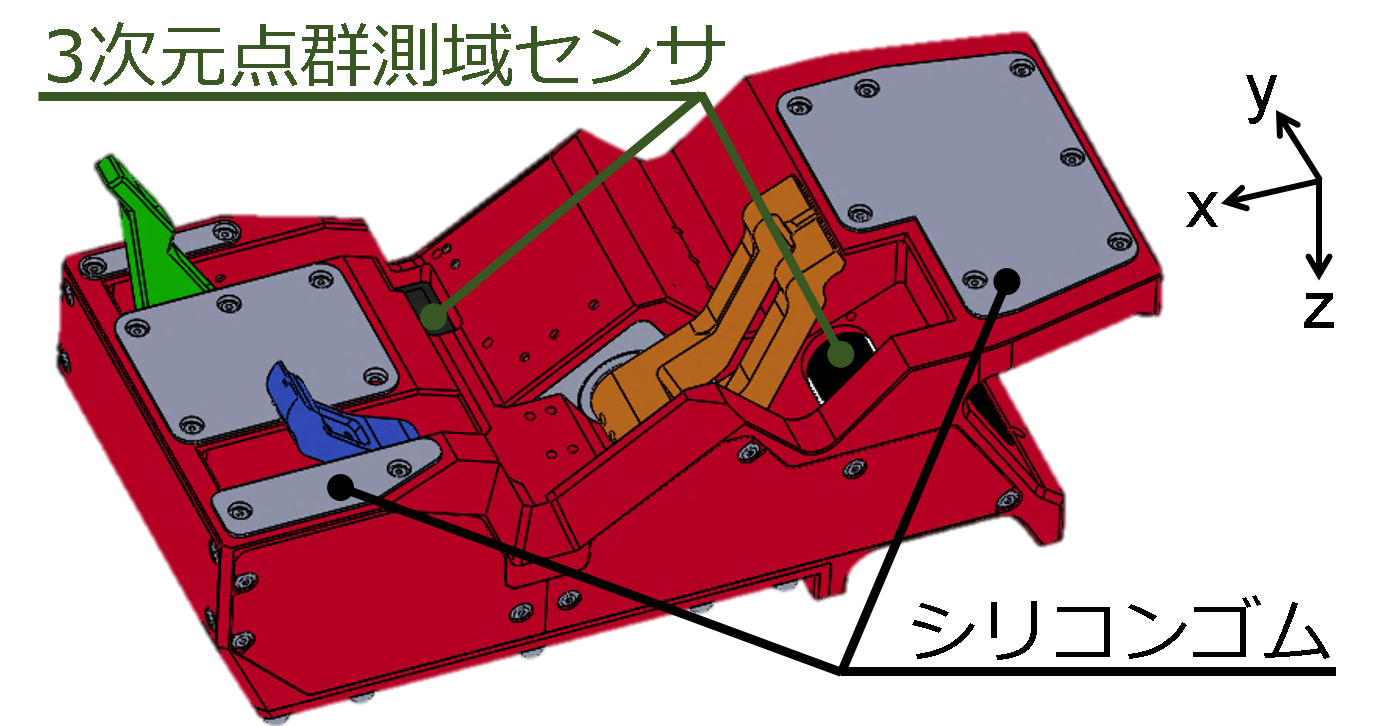
エンドエフェクタ外装
[関連論文]
・佐藤丈弘,今井朝輝,橋本健二,孫瀟,松澤貴司,大河原正篤,木村駿介,熊谷健吾,松原孝将,山口航希,内藤博,名村圭祐,寺江航汰,村上将嗣,吉田駿也,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第28報:指先と手掌での作業と多様な移動様式への対応が可能な4肢ロボットのエンドエフェクタ),”第37回日本ロボット学会学術講演会予稿集,1G2-02,東京都,2019年9月.
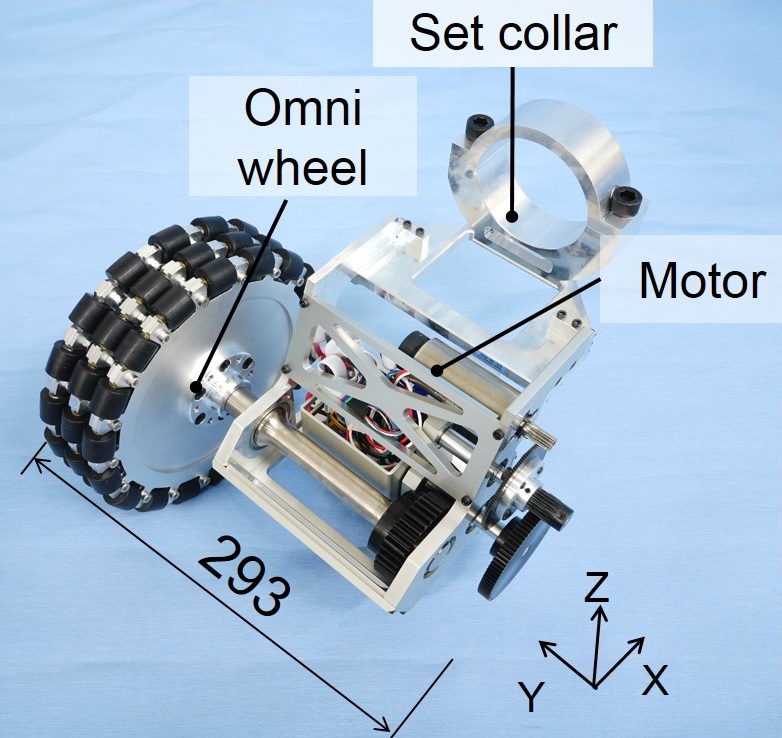
■ 車輪移動範囲を拡張する能動車輪機構
平地のみならず車輪移動中に想定される環境を移動範囲の対象とするため,複数の自由度を有する脚のうち,先端1自由度を活用するアクティブキャスタを開発しました.アクティブキャスタの特性や脚自由度による姿勢遷移を活用し,①前後方向,②左右方向,③一輪のみの3パターンでの凹凸30[mm]の段差への乗り上げ,縁石を代表とする高さ250[mm]程度の環境の踏破,支持領域が可変な車輪移動を可能にしました.
従来通り,全方向移動や登坂,狭隘部の走行,脚移動との両立も実現することで,4肢ロボットの機能を保ちつつ,車輪移動の範囲を拡張しました.
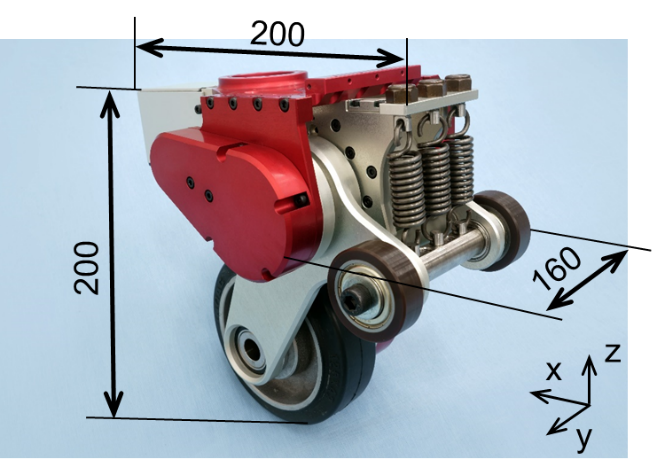
能動車輪機構寸法
走行姿勢
[関連論文]
・村上将嗣,山口航希,橋本健二,孫瀟,松澤貴司,今井朝輝,大河原正篤,木村駿介,熊谷健吾,松原孝将,内藤博,名村圭祐,佐藤丈弘,寺江航汰,吉田駿也,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第29報:4肢ロボットの車輪移動範囲を拡張可能な能動車輪機構),”第37回日本ロボット学会学術講演会予稿集,1G2-03,東京都,2019年9月.
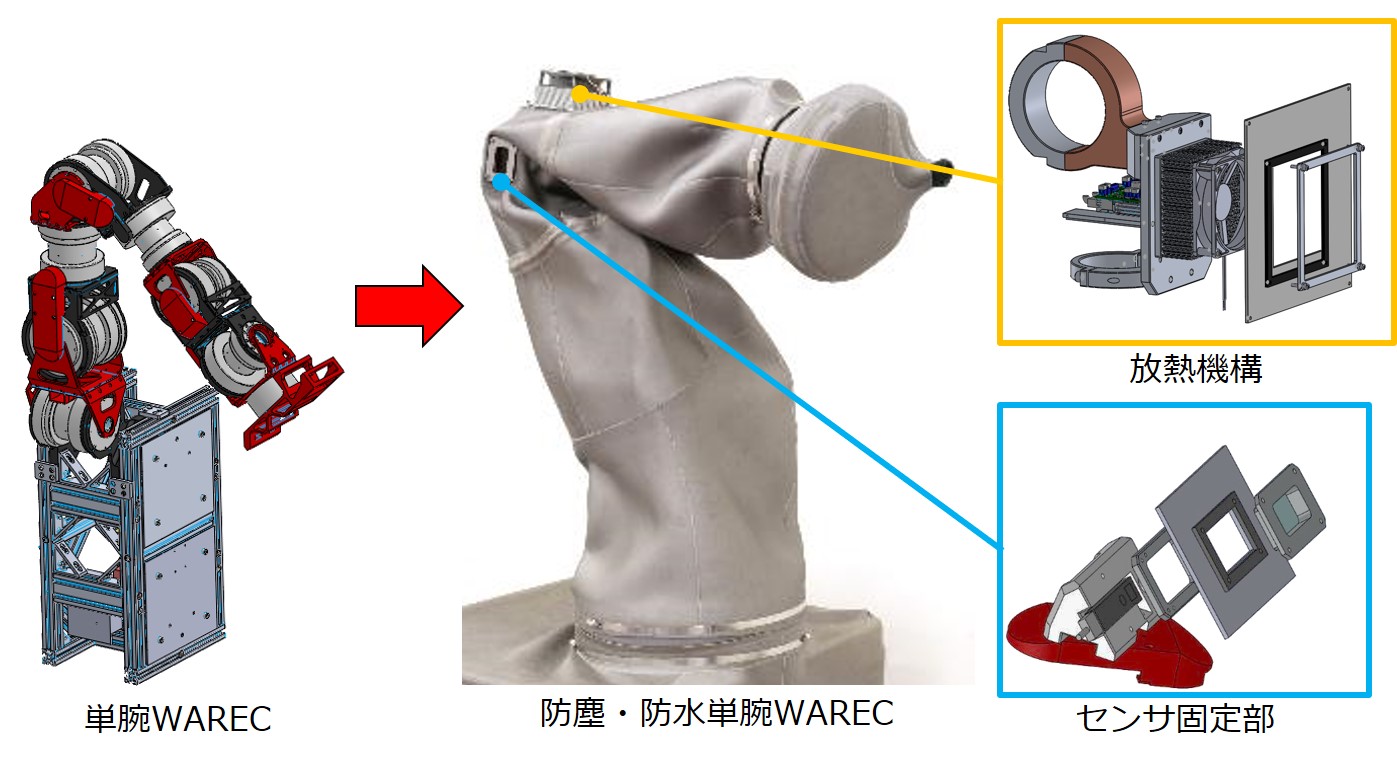
■ 環境認識センサの運用が可能な防塵・防水外装
環境認識センサの運用が可能な4肢ロボットの防塵防水外装を開発しました.WAREC-1Rの肢1本と胴体からなる単腕WARECにスーツを装着させ,センサ付近箇所に赤外線透過フィルタ,アクチュエータ付近に放熱機構を取り付けました.これにより,防塵・防水および環境センシングの両立と長時間の連続運用を実現しました.
[関連論文]
・吉田駿也,大河原正篤,橋本健二,孫瀟,松澤貴司,今井朝輝,木村駿介,熊谷健吾,松原孝将,山口航希,内藤博,名村圭祐,佐藤丈弘,寺江航汰,村上正嗣,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第30報:環境認識センサの運用が可能な防塵・防水外装)”, 第37回日本ロボット学会学術講演会予稿集,1G2-04,東京都,2019年9月.
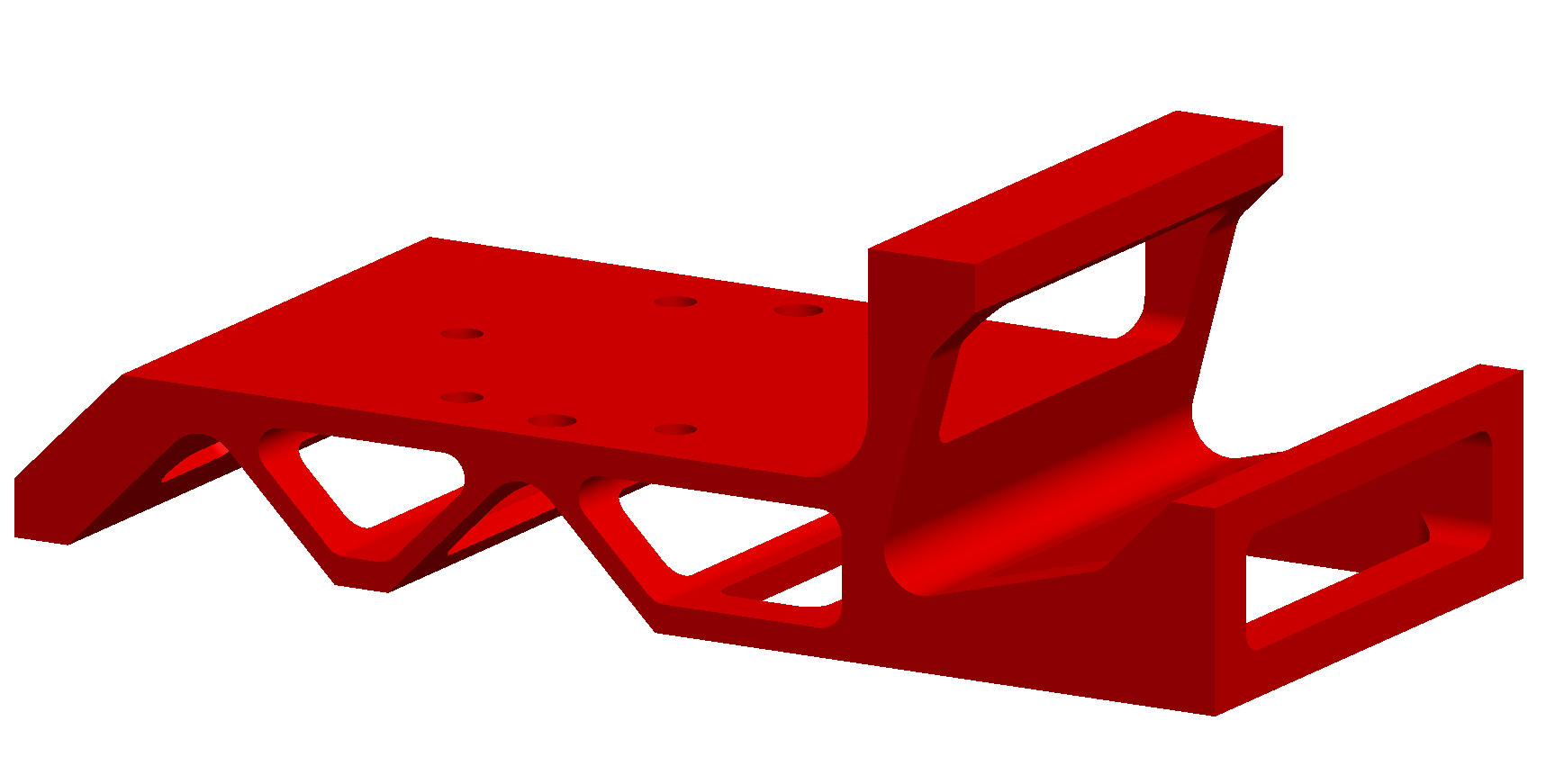
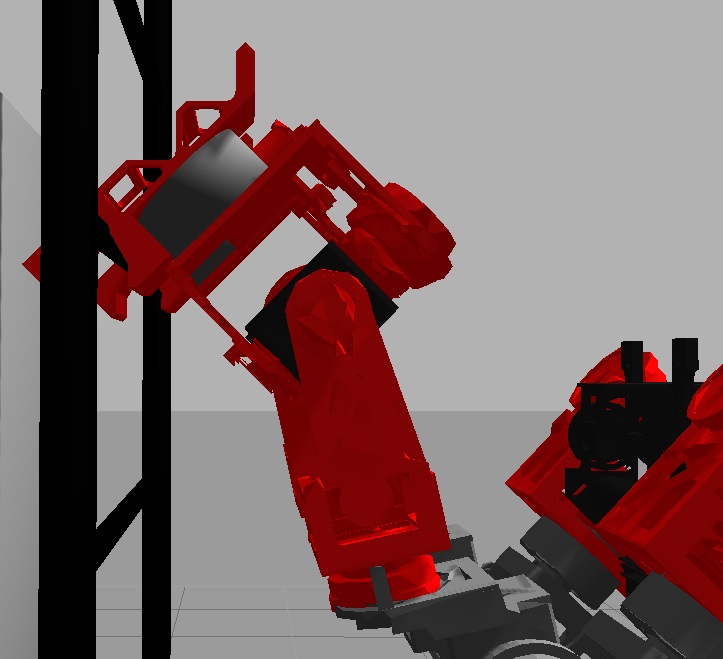
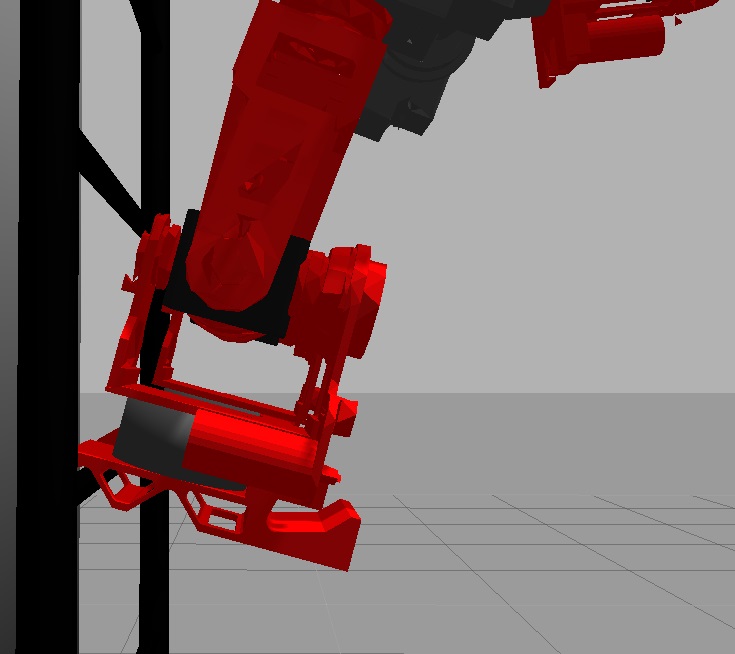
■ 高速かつ安定なはしご昇りを可能とする高剛性な脚部構造
3点支持でのはしご昇りにおいて,高速性と安定性の両立を図る「1桟飛ばし」を実現するためには,脚部のたわみによる手先の位置・姿勢の誤差が問題でした.そこで,従来よりも高剛性な脚部構造を開発しました.これによって,はしご昇り時の所望の姿勢において脚部のたわみを60%低減することに成功しました.それに伴い1桟飛ばし3点支持はしご昇りを実現し,3点支持はしご昇りの速度を従来の2.5倍にまで向上させました.
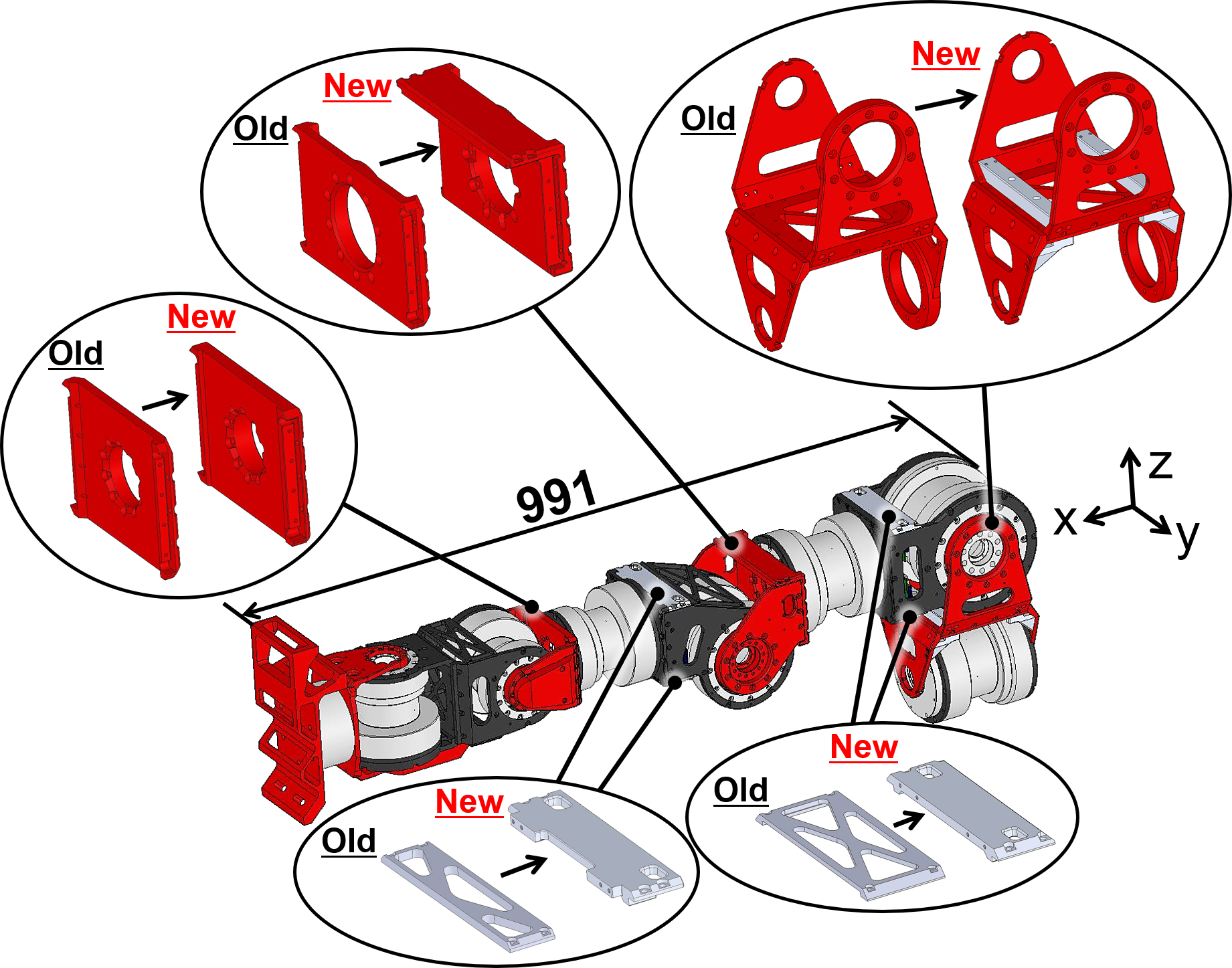
剛性改良後の脚部
はしご昇り姿勢
[関連論文]
・伊藤明,孫瀟,松澤貴司,内藤博,名村圭祐,佐藤丈弘,寺江航汰,村上将嗣,吉田駿也,近藤貴久,高西淳夫,橋本健二,“極限環境下で作業可能な災害対応ロボットの開発(第37報:はしご昇りの速度・安定性向上を可能とする4肢ロボットの脚部剛性改良)”, 第38回日本ロボット学会学術講演会予稿集,3F2-04,東京都,2020年10月.
WAREC-1 (2015-2018)
WAREC-1は肢に計7自由度(肩・股関節に3自由度,肘・膝関節に1自由度,手・足関節に3自由度)を有した4肢共通構造の脚ロボットです.中空高出力アクチュエータユニットの搭載により高出力を実現し,分散制御の実装により省配線化を実現しています.
WAREC-1(WAseda REsCuer-No.1)
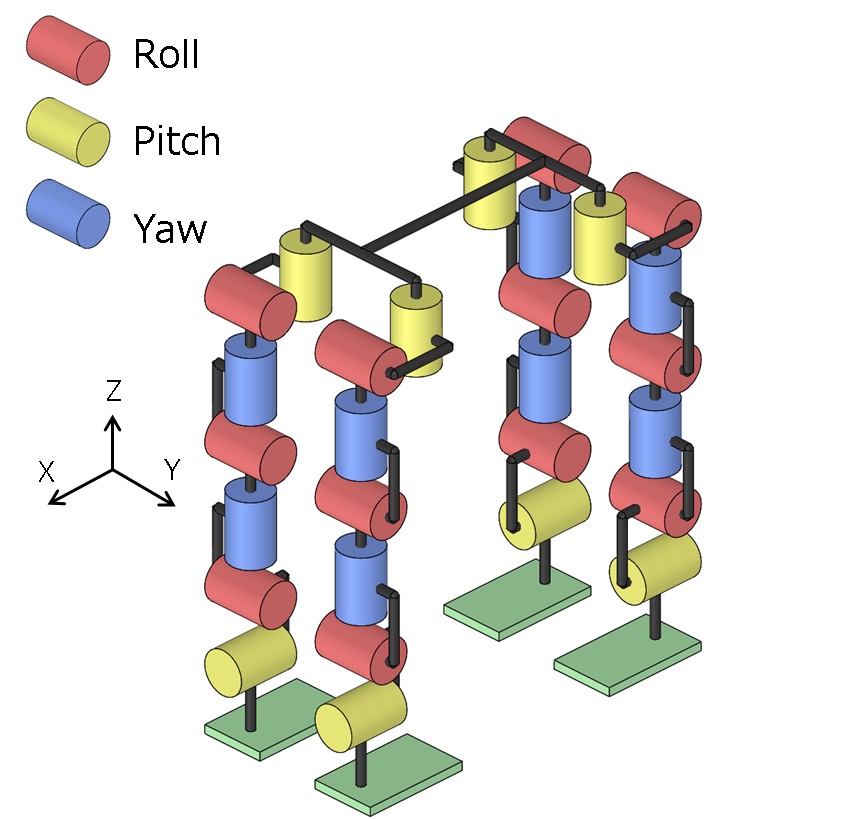
自由度配置図
| 自由度 |
肩・股関節:3自由度 x 4肢 肘・膝関節:1自由度 x 4肢 手・足関節:3自由度 x 4肢 |
|---|---|
| 合計:28自由度 | |
| センサ |
6軸力覚センサ IMU |
| アクチュエータ | DCモータ |
| 質量[kg] | 150 |
[関連論文]
・Kenji Hashimoto, Shunsuke Kimura, Nobuaki Sakai, Shinya Hamamoto, Ayanori Koizumi, Xiao Sun, Takashi Matsuzawa, Tomotaka Teramachi, Yuki Yoshida, Asaki Imai, Kengo Kumagai, Takanobu Matsubara, Koki Yamaguchi, Gan Ma and Atsuo Takanishi, "WAREC-1 - A Four-Limbed Robot Having High Locomotion Ability with Versatility in Locomotion Styles", Proceedings of The 15th IEEE International Symposium on Safety, Security, and Rescue Robotics 2017 (SSRR 2017), pp. 172-178, Shanghai, China, October, 2017.
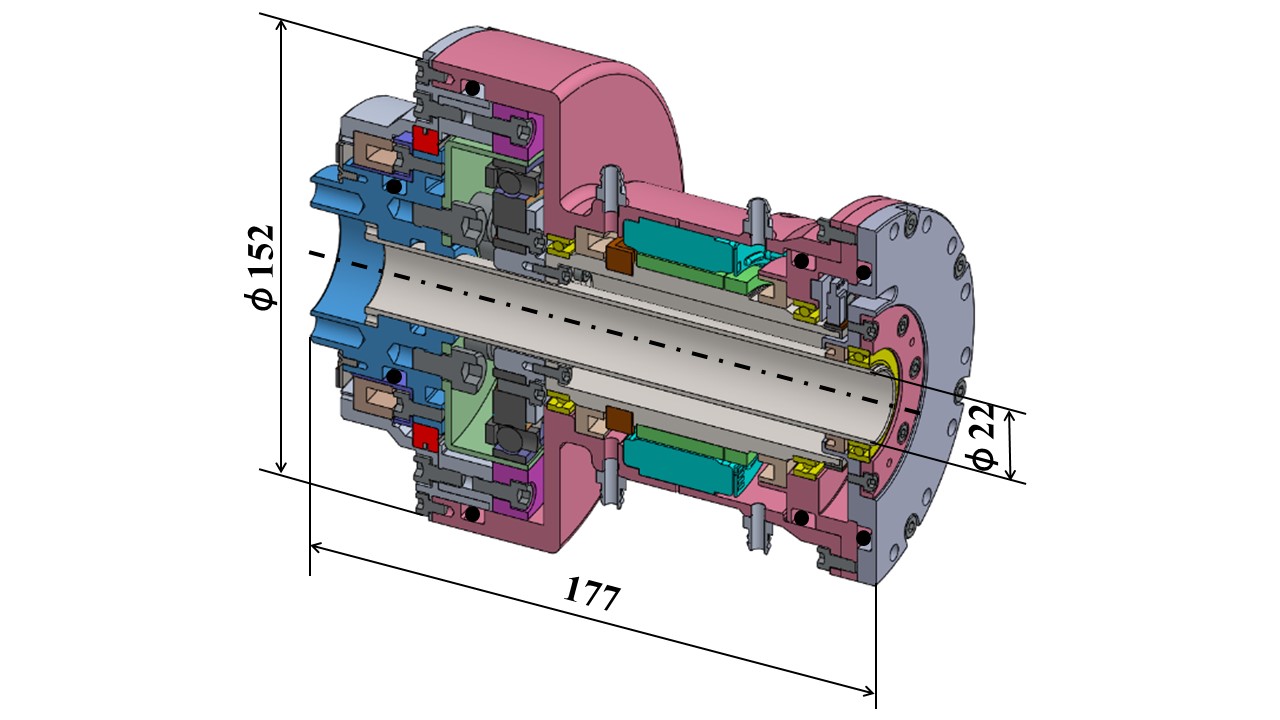
■ 中空高出力アクチュエータユニット
フレームレスモータと波動歯車減速機を組み込んだ高出力アクチュエータユニットを開発しました.災害対応ロボットでは極限環境下での移動・作業が求められることから配線の露出を減らすために配線を通すための中空構造も有しています.
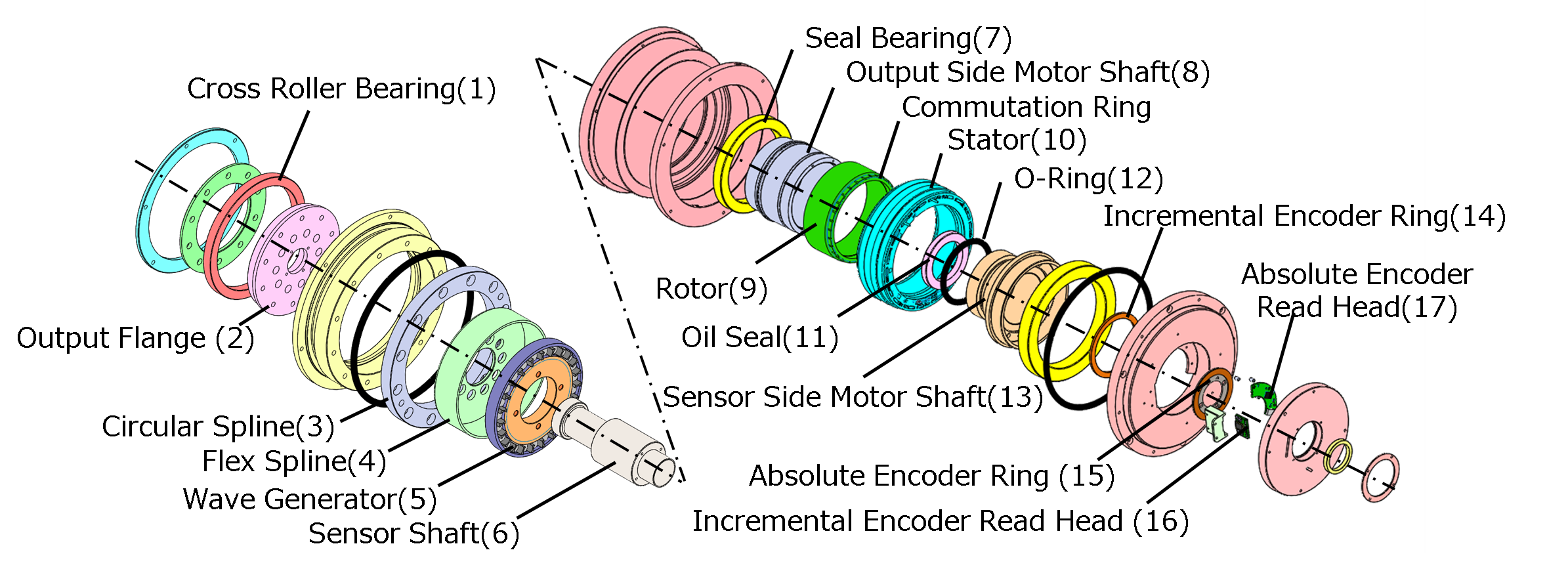
アクチュエータユニット分解図
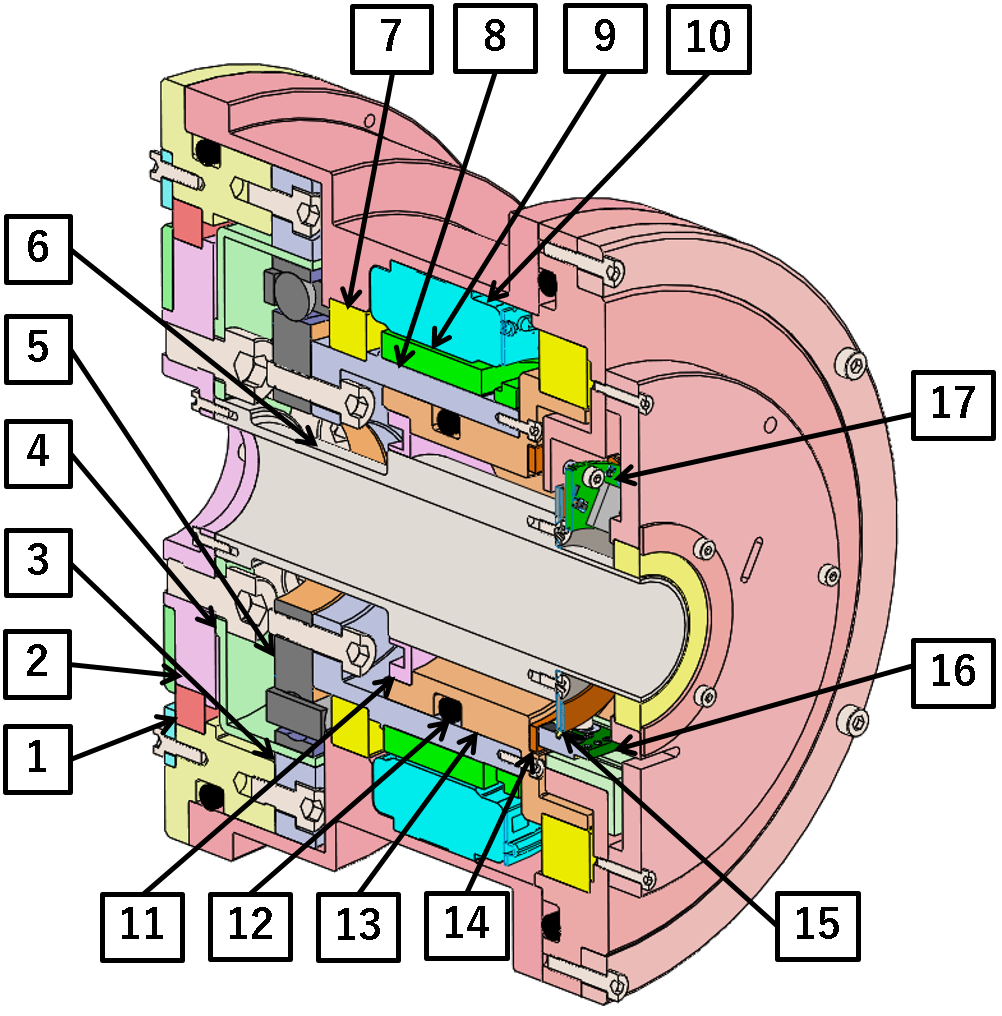
アクチュエータユニット断面図
[関連論文]
・木村駿介,酒井伸明,橋本健二,孫瀟,小泉文紀,濱元伸也,寺町知峰,松澤貴司,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第10報:中空構造を持つ高出力アクチュエータユニット),”第34回日本ロボット学会学術講演会予稿集,2C2-01,山形県,2016年9月.
■ 路面接地可能な胴体構造
腹ばい動作を行う際に胴体のみで安定した接地が可能な凹形状の胴体を開発しました.露出を防ぐために電装系を胴体内部に収められる構造になっております.
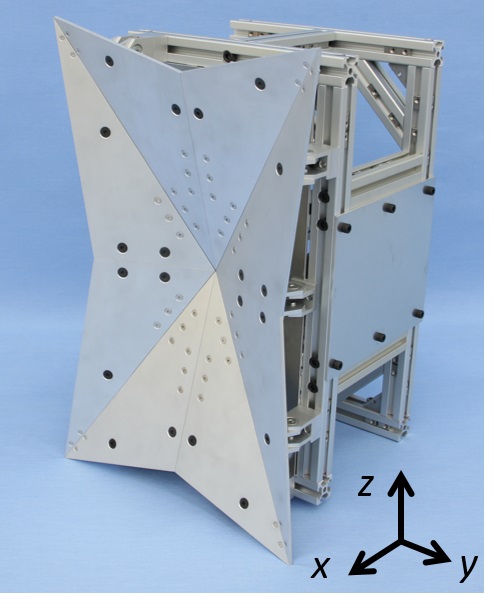
胴体部画像
胴体部断面図
[関連論文]
・酒井伸明,小泉文紀,橋本健二,松澤貴司,孫瀟,濱元伸也,木村駿介,寺町知峰,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第8報:匍匐移動を目的とした4肢ロボットの胴体構造),”第34回日本ロボット学会学術講演会予稿集,2C1-06,山形県,2016年9月.
■ 直動スパイク機構を有する胴体機構
腹ばい移動では胴体接地時のロボットの予期せぬ方向への滑動が問題でした.そこで,不整路面上で受動的に引っかかりを生み出しロボットの滑動を低減する直動スパイク機構を有する胴体を開発しました.評価実験では,傾斜のある不整路面を上る際にロボットの滑動が低減され,腹ばいの速度が従来の凹形状と比較して1.2倍となる事を確認しました.
直動スパイク機構を有する胴体部
直動スパイク機構
[関連論文]
・松原孝将,松澤貴司,橋本健二,孫瀟,寺町知峰,木村駿介,酒井伸明,吉田雄貴,今井朝輝,熊谷健吾,山口航希,名村圭祐,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第16報:腹ばい移動時の滑動を低減する4肢ロボットの胴体機構),”第35回日本ロボット学会学術講演会予稿集,1K1-02,埼玉県,2017年9月.
■ 4肢ロボットの移動速度を向上する能動車輪機構
4肢ロボットの移動速度を向上するために能動車輪機構を開発しました.ロボットに搭載することで2[km/h]での車輪走行が可能となり,平地における移動速度が従来の20倍速くなりました.また幅800[mm]の狭隘空間での車輪走行や,段差50[mm],斜面10[deg]の踏破に加え,オムニホイールによる全方向移動の他,車輪搭載時にも垂直はしごの昇降や瓦礫上の腹ばい移動が可能です.
 能動車輪機構
能動車輪機構
 全方向移動モード
全方向移動モード
[関連論文]
・山口航希,松澤貴司,橋本健二,孫瀟,寺町知峰,木村駿介,酒井伸明,吉田雄貴,今井朝輝,熊谷健吾,松原孝将,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第17報:4肢ロボットの移動速度を向上する能動車輪機構),”第35回日本ロボット学会学術講演会予稿集,1K1-03,埼玉県,2017年9月.
■ 移動と単純な作業に使用できるエンドエフェクタ
垂直はしご昇降や2足歩行などの移動と,簡単な作業の両方に使用できるエンドエフェクタを開発しました.このエンドエフェクタは手と足の両方の役割を果すことができるため,WAREC-1の4肢共通な構造であることを最大限活かすことができます.
 エンドエフェクタ画像
エンドエフェクタ画像
 エンドエフェクタが可能な作業
エンドエフェクタが可能な作業
[関連論文]
・今井朝輝,寺町知峰,橋本健二,松澤貴司,孫瀟,木村駿介,酒井伸明,吉田雄貴,熊谷健吾,松原孝将,山口航希,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第18報:フック形状を有し移動と単純な作業に使用可能な4肢ロボットのエンドエフェクタ),”第35回日本ロボット学会学術講演会予稿集,1K2-02,埼玉県,2017年9月.
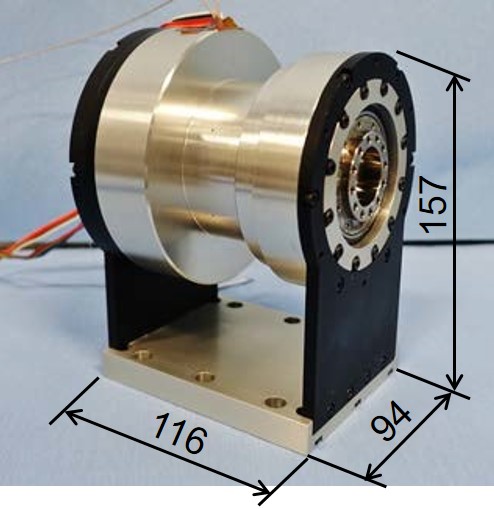
■ 浸漬冷却式(油冷式)アクチュエータユニット
災害現場で活躍するロボットの関節には大きな力が必要ですが,モータは高出力になると発熱量も大きくなります.そこで油を用いて冷却する,浸漬(しんし)冷却という方法をモータに適用し,さらにその油を減速機の潤滑油と共通にすることにより,従来よりも軽量で高出力なアクチュエータユニットを開発しました.
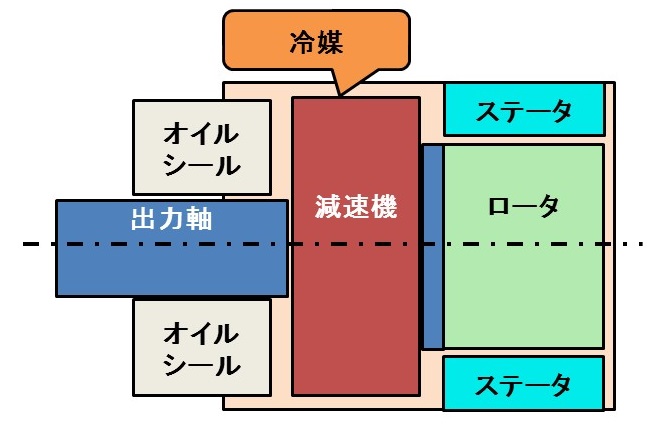
浸漬冷却式アクチュエータユニット概要図
浸漬冷却式アクチュエータユニット外観
浸漬冷却式アクチュエータユニット断面図
[関連論文]
・橋本健二,神永拓,熊谷健吾,寺町知峰,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第14報:浸漬冷却を利用したアクチュエータユニットの構想),”日本機械学会ロボティクス・メカトロニクス講演会2017(ROBOMECH2017),1P1-P04,福島県,2017年5月.
・熊谷健吾,橋本健二,寺町知峰,松澤貴司,木村駿介,酒井伸明,孫瀟,吉田雄貴,今井朝輝,松原孝将,山口航希,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第19報:浸漬冷却可能な アクチュエータユニットの製作と評価),”第35回日本ロボット学会学術講演会予稿集,1K2-03,埼玉県,2017年9月.
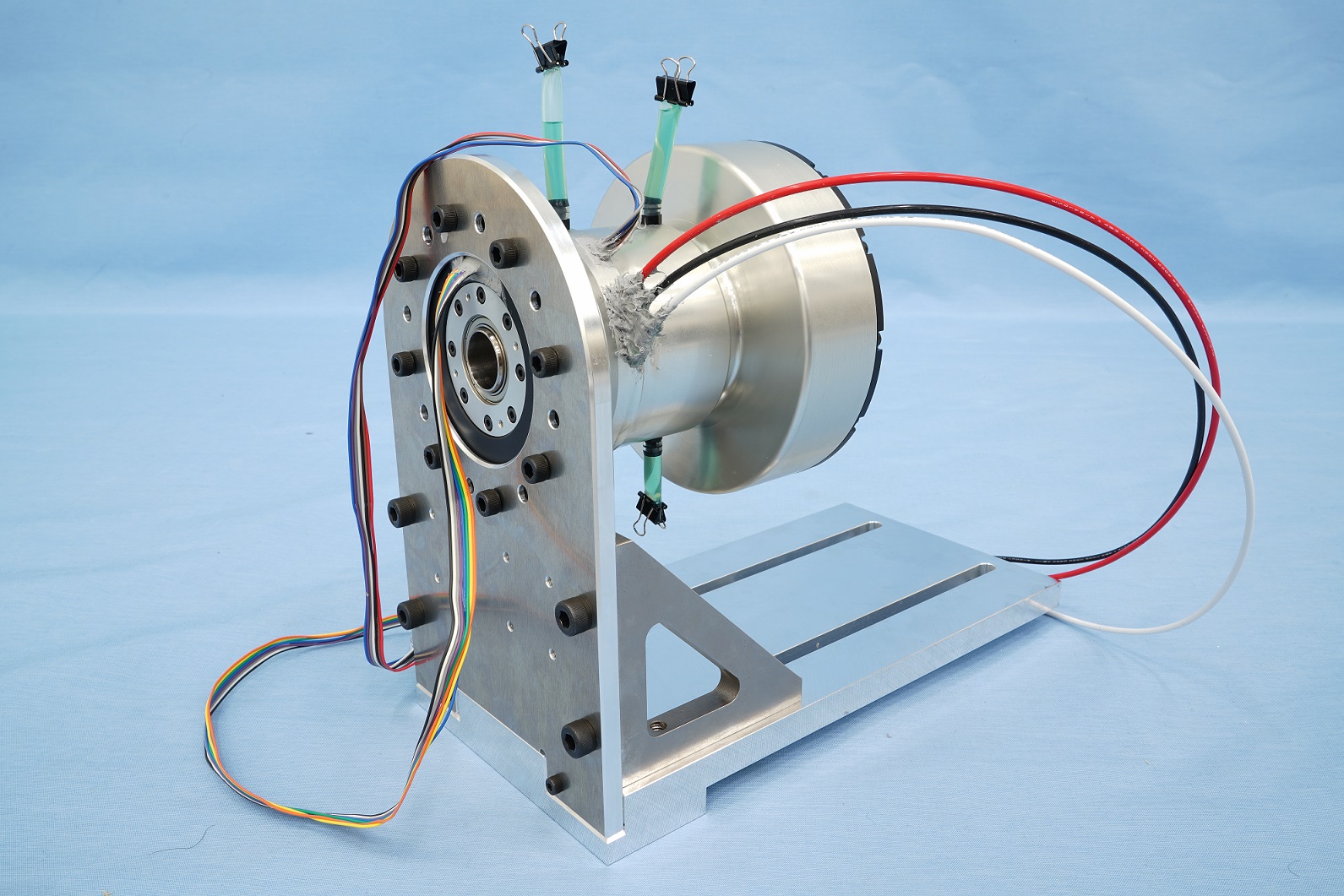
■ 真空対応アクチュエータユニット
宇宙環境で運用が可能なロボットの実現に向けた第一歩として,WAREC-1用に開発したアクチュエータユニットに真空環境耐性処置を施し,約10-3Paの真空環境下にて100時間の連続駆動を実現しました.
真空対応アクチュエータユニット外観
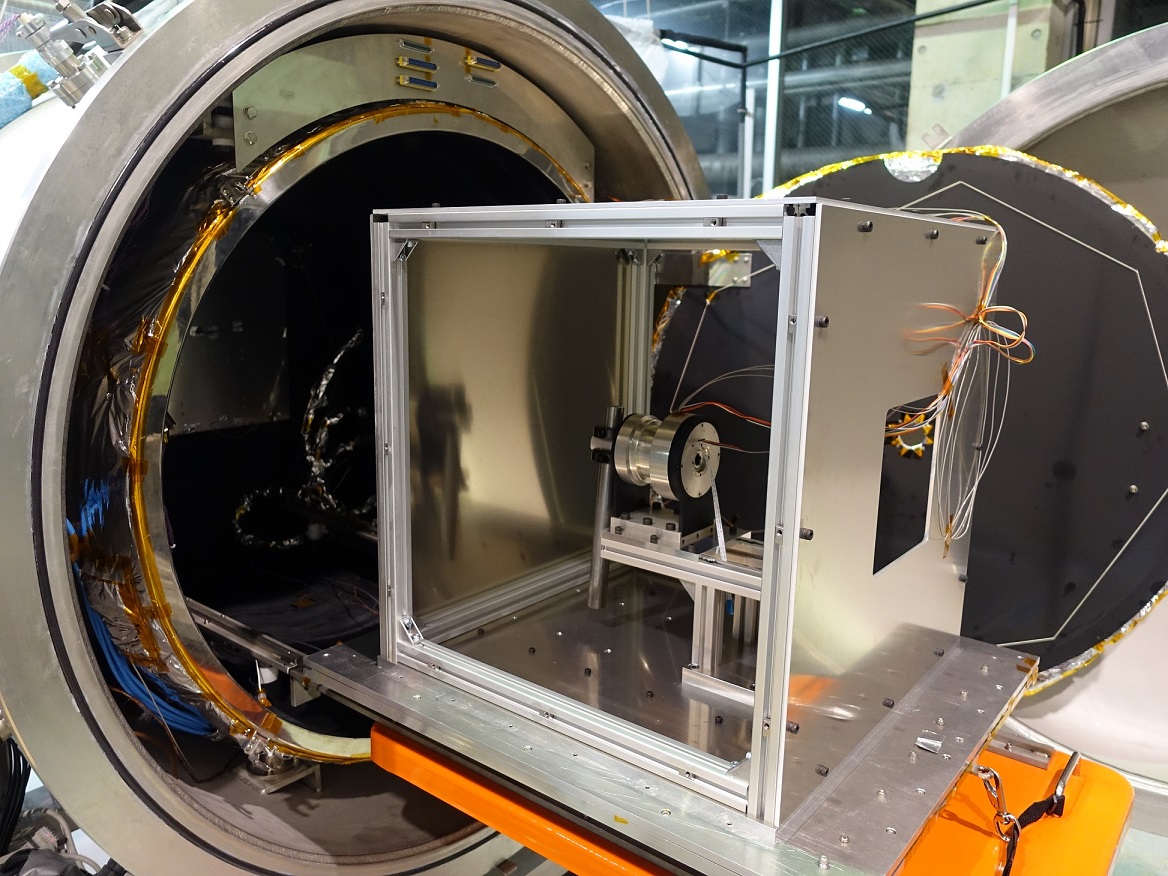
実験後の真空チャンバとアクチュエータ
[関連論文]
・橋本健二,酒井伸明,木村駿介,熊谷健吾,今井朝輝,松澤貴司,吉田雄貴,山口航希,高西淳夫,“宇宙ロボットに向けた真空対応アクチュエータユニットの開発と真空試験,”第35回日本ロボット学会学術講演会予稿集,1E1-02,埼玉県,2017年9月.
■ 胴体接地により移動能力を向上する胴体機構
胴体接地を活用した移動能力の向上を目的に固定スパイクを有する胴体部を開発しました.これにより,瓦礫路面上では,胴体接地時の滑動が低減されます.また,滑落や転倒することなく,階段やロボットの肢の長さよりも高い段差の踏破が可能です.
固定スパイクを有する胴体部
固定スパイク
[関連論文]
・名村圭祐,松澤貴司,橋本健二,孫瀟,酒井伸明,林翔太,吉田雄貴,今井朝輝,大河原正篤,熊谷健吾,松原孝将,山口航希,内藤博,高木一輝,高西淳夫,"極限作業下で作業可能な災害対応ロボットの開発(第24報:胴体接地を活用した段差踏破が可能な4肢ロボットの胴体機構),"第36回日本ロボット学会学術講演会予稿集,1D3-04,愛知県,2018年9月.
■ 多様な移動様式と遠隔作業に対応可能なエンドエフェクタ
WAREC-1の多様な移動様式と遠隔作業に対応可能なエンドエフェクタを開発しました.このエンドエフェクタは能動3自由度と差動機構,フック形状を有することで,垂直はしご昇降や腹ばい移動などに加え,多様な作業や馴染み把持を実現しました.
 エンドエフェクタ外観
エンドエフェクタ外観
 多様な動作による作業
多様な動作による作業
[関連論文]
・内藤博,酒井伸明,橋本健二,毛利哲也,並木明夫,孫瀟,松澤貴司,林翔太,吉田雄貴,今井朝輝,大河原正篤,熊谷健吾,松原孝将,山口航希,名村圭祐,高木一輝,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第23報:4肢ロボットの多様な移動様式と遠隔作業に対応可能なエンドエフェクタ),”第36回日本ロボット学会学術講演会予稿集,1D3-07,愛知県,2018年9月.
プロトタイプ機 (2014)
肢には計7自由度(肩・股関節に3自由度,肘・膝関節に1自由度,手・足関節に3自由度),体幹には1自由度を有しています.災害対応ロボットは4肢が共通の構造となっており,1肢が故障した際にも残りの肢を用いて移動することが可能になります.
4肢ロボットのプロトタイプ機
 自由度配置図
自由度配置図
| 自由度 |
肩・股関節:3自由度 x 4肢 肘・膝関節:1自由度 x 4肢 手・足関節:3自由度 x 4肢 体幹:1自由度 |
|---|---|
| 合計:29自由度 | |
| センサ | 6軸力覚センサ |
| アクチュエータ | DCモータ |
| 質量[kg] | 110 |
2足歩行
4足歩行
腹ばい移動
本ロボットの最大の特徴はエンドエフェクタの形状です.エンドエフェクタは3つの溝を有しており,それぞれ脚として使う場合と腕として使う場合に応じて使い分けています.
エンドエフェクタ
エンドエフェクタ
(手として使う場合)
エンドエフェクタ
(足として使う場合)
[関連論文]
・Kenji Hashimoto, Takashi Matsuzawa,Tomotaka Teramachi, Kazuhito Uryu, Xiao Sun, Sshinya Hamamoto, Ayanori Koizumi and Atsuo Takanishi, “A Four-Limbed Disaster-Response Robot Having High Mobility Capabilities in Extreme Environments,” Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017), pp. 5398–5405, Vancouver, Canada, September, 2017.
■ 3点支持によるはしご昇降
■ はしご昇り切り
はしごの一番上の桟に到達した後,支柱の間を通り抜けてキャットウォークに乗り移る昇り切り動作を実現しました.