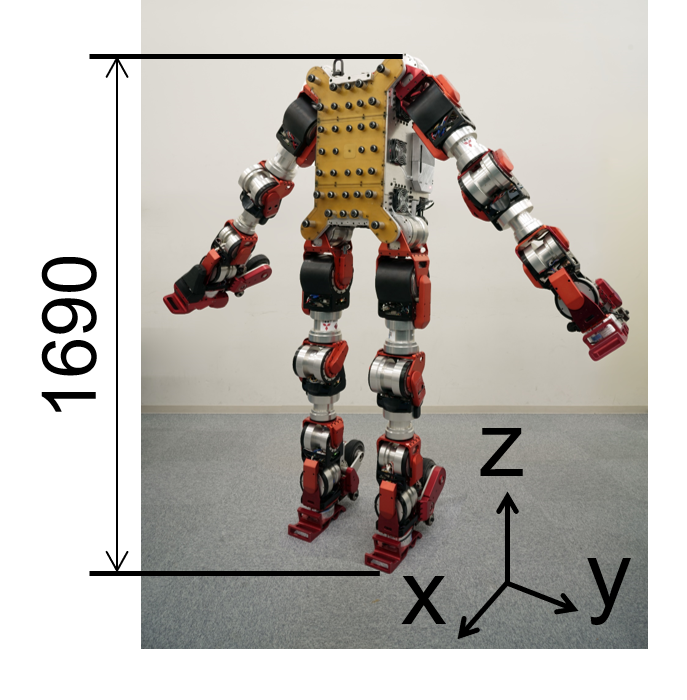
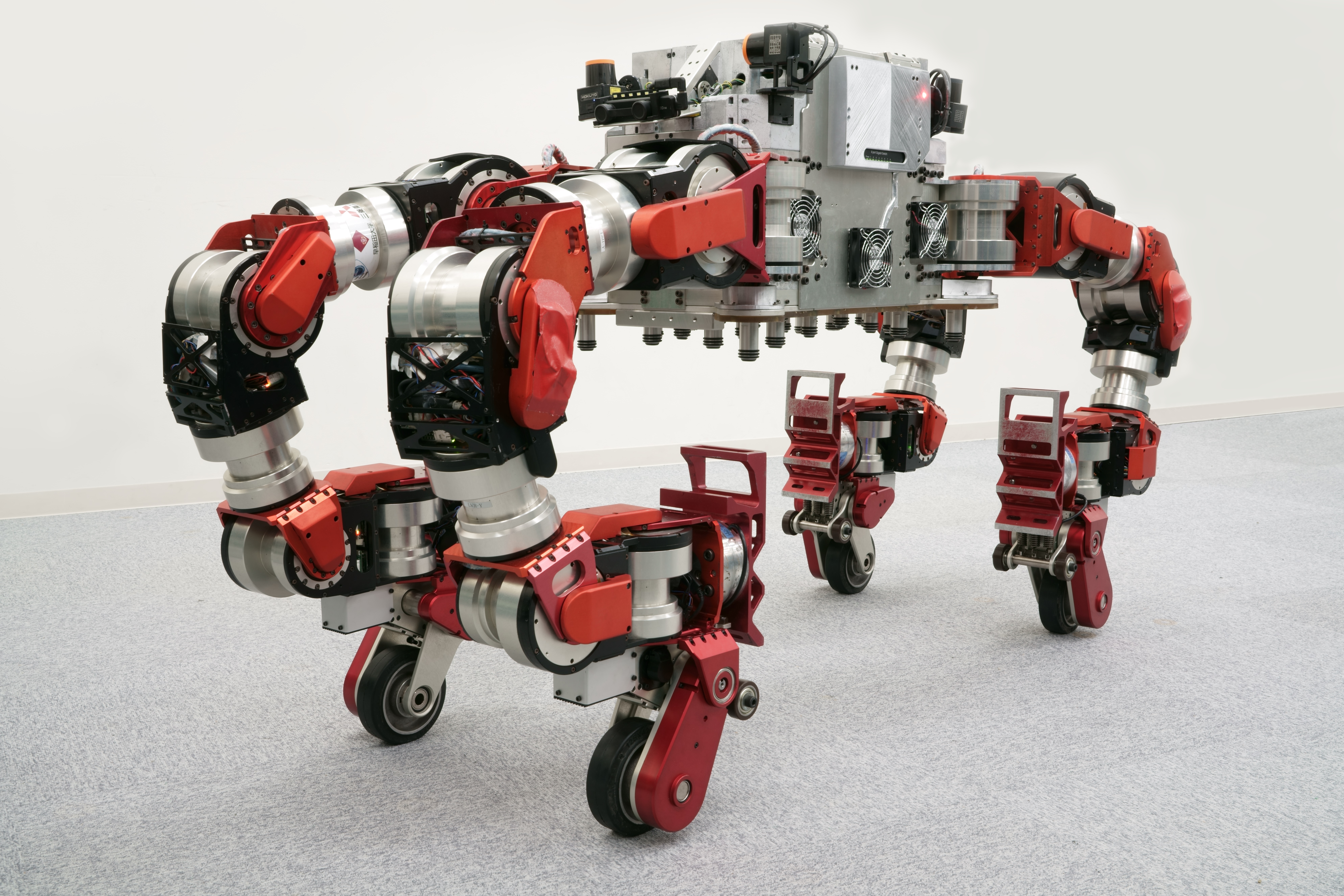
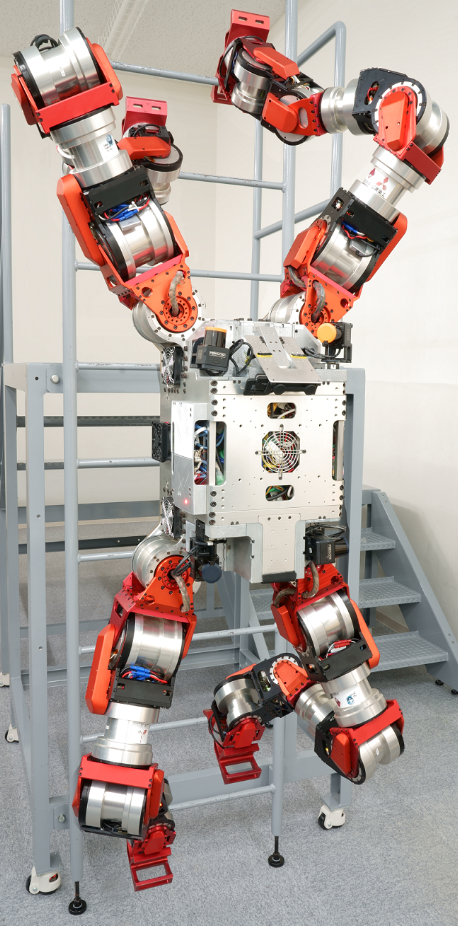
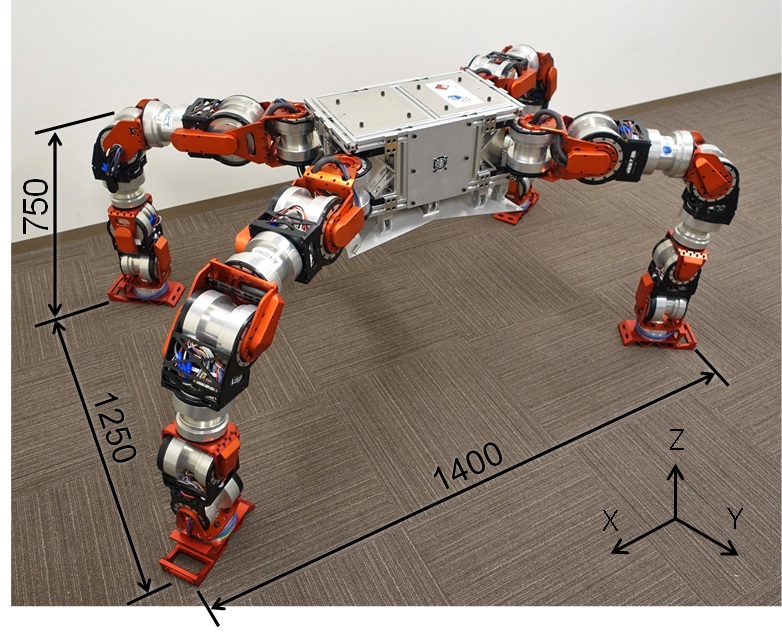
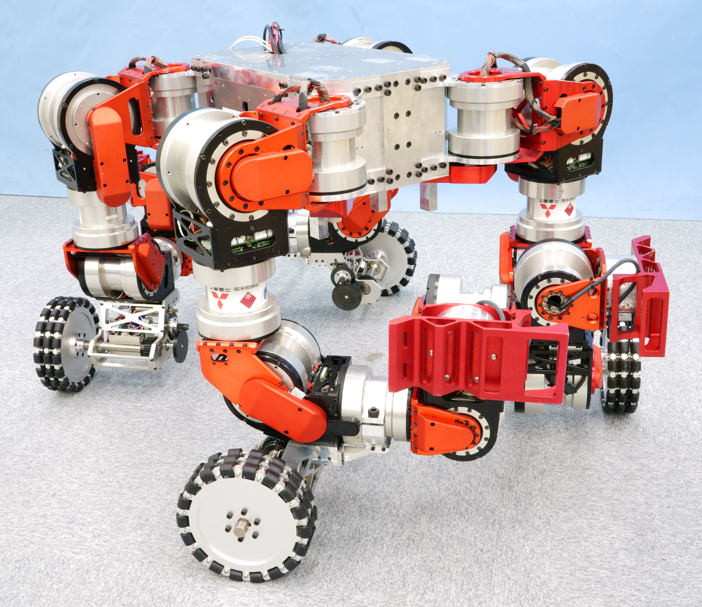
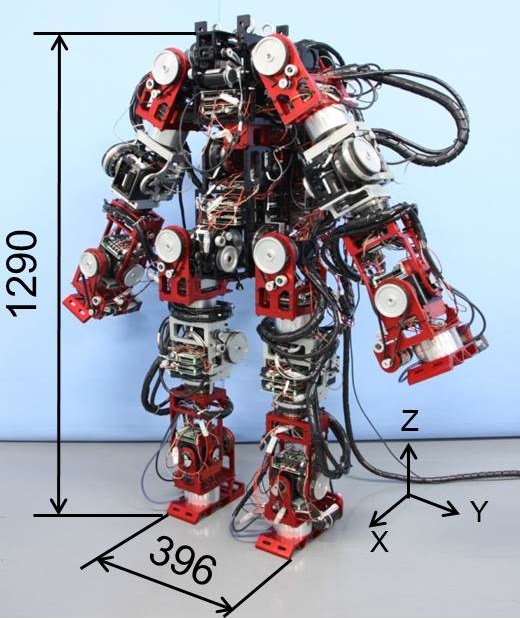
WAREC-1R (2019-)
WAREC-1R originates from its base “WAREC-1”, equipped with mechanisms redesigned for real application. With brand new wheels and end-effectors at the end of its 4 limbs, performance such as high-speed locomotion on flat terrain and dexterous manipulation with fingertip DoF (Degree of Freedom) by WAREC-1R are enabled. Furthermore, lithium-ion batteries and wireless LAN repeater newly equipped inside the body make it possible for the robot to operate without external cables.
WAREC-1R
(WAseda REsCuer-No.1 Refined)
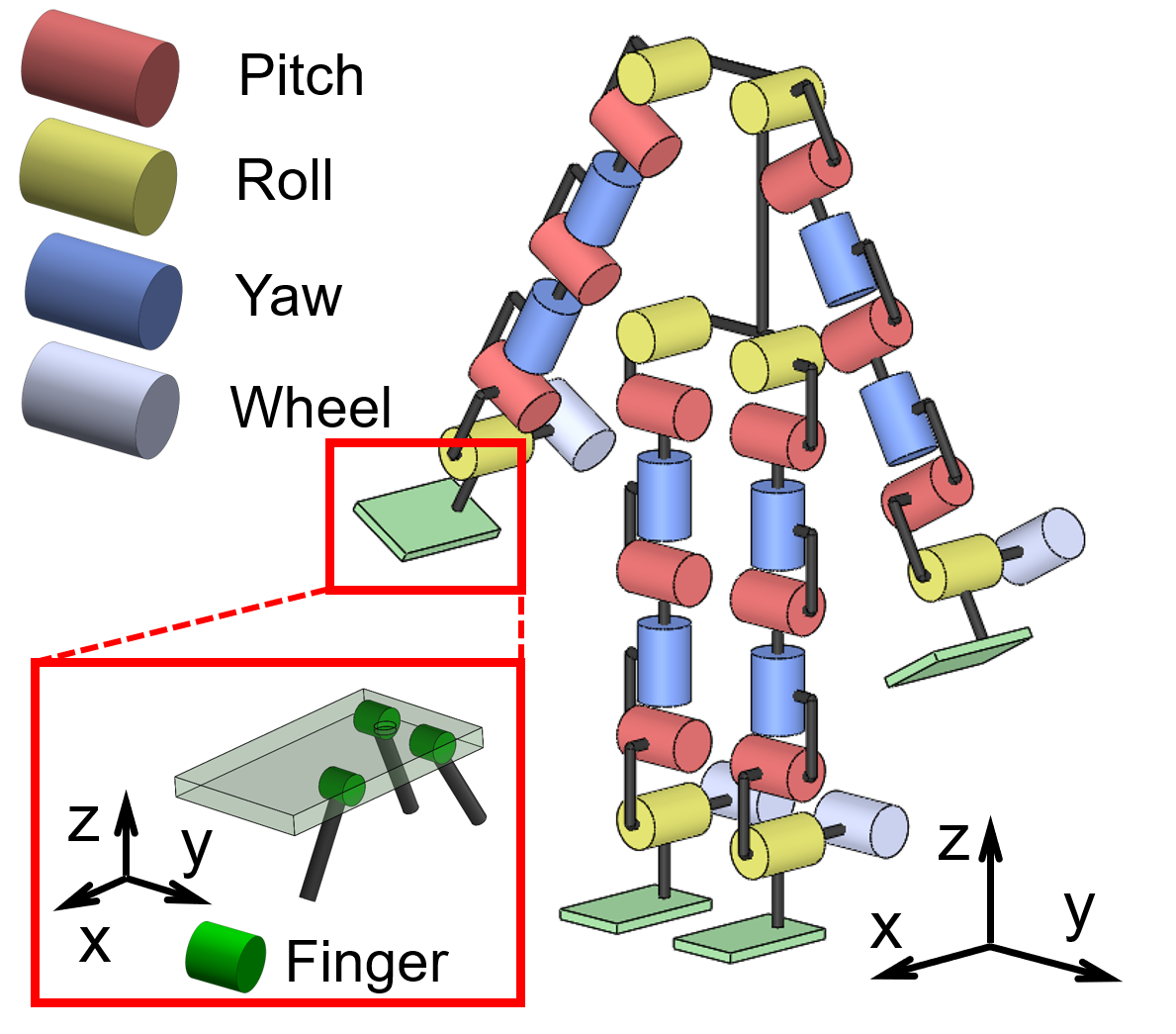
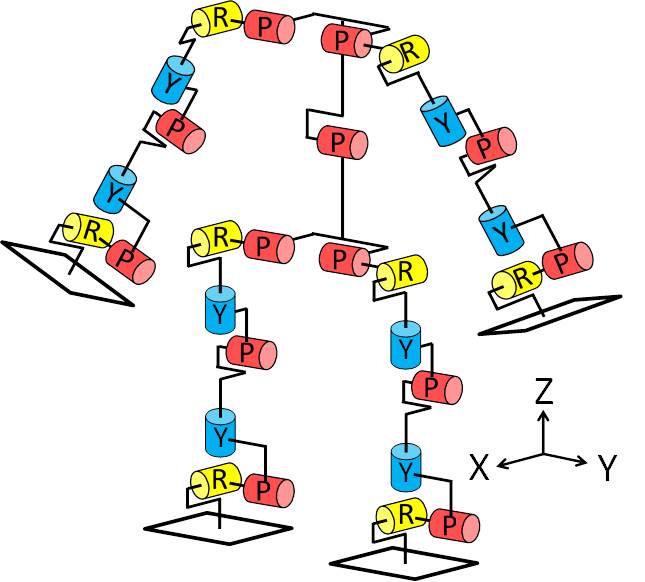
Configuration of Degrees of Freedom
Specification of WAREC-1R
| Degrees of Freedom |
Shoulder/ Thigh:3 DoFs x 4 limbs Elbow/ Knee:3 DoFs x 4 limbs Wrist/ Ankle:3 DoFs x 4 limbs Total : 28 DoFs |
|---|---|
|
Wheel mechanism:1 DoF x 4 limbs End-effector:3 DoFs x 1 limbs |
|
| Sensor |
6 axis force/torque IMU Variable SOKUIKI Sensor Array Stereo camera |
| Actuator | Actuator units : DC brushless motors Wheel mechanism : DC brushless motors End-effector : DC motors |
| Mass kg | 179 (w/ batteries) |
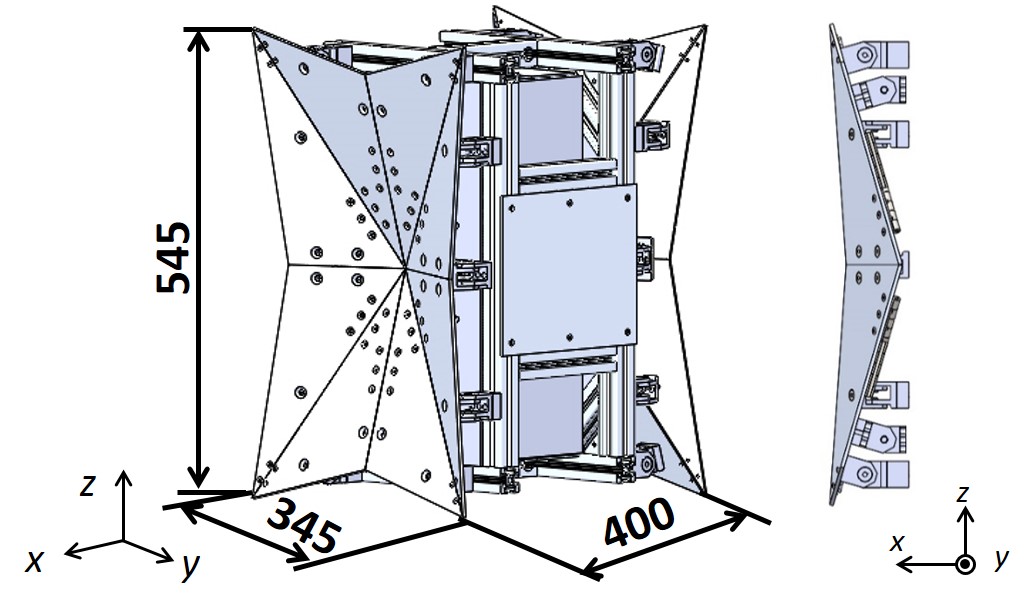
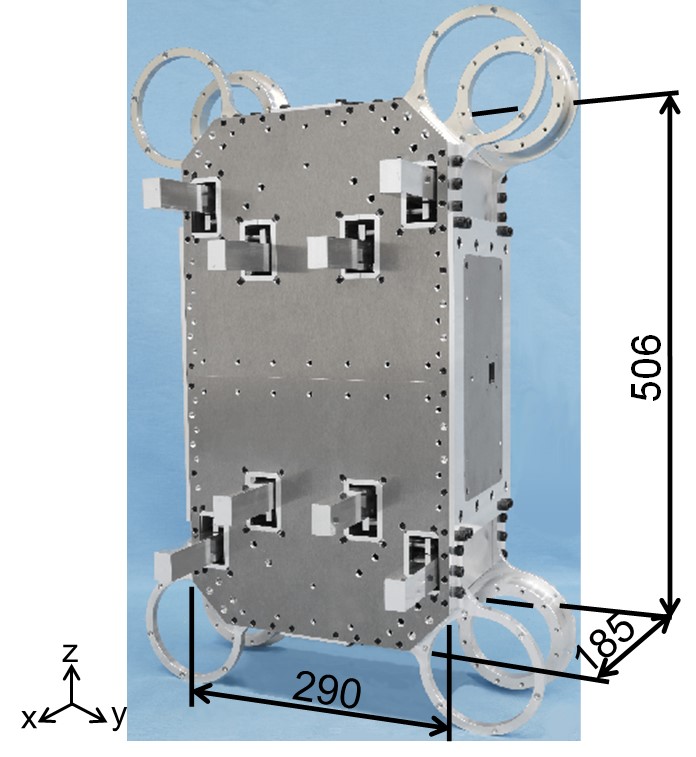
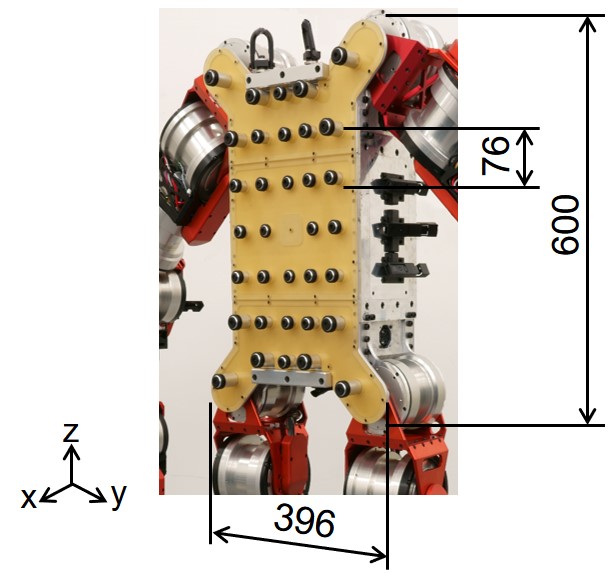
■ Development of body structure enabling battery-driven, wireless robot platform with multi-sensor system
Previous versions of WAREC series could only be operated with external cables for power supply and communication. Therefore, in order to realize cableless operation, we developed a new body mechanism for WAREC-1R. To contain additional devices, we expanded interior space of the mechanism and rearranged the layout of devices. Meanwhile, outer shape was also designed to prevent overlapping the recognition range of sensors.
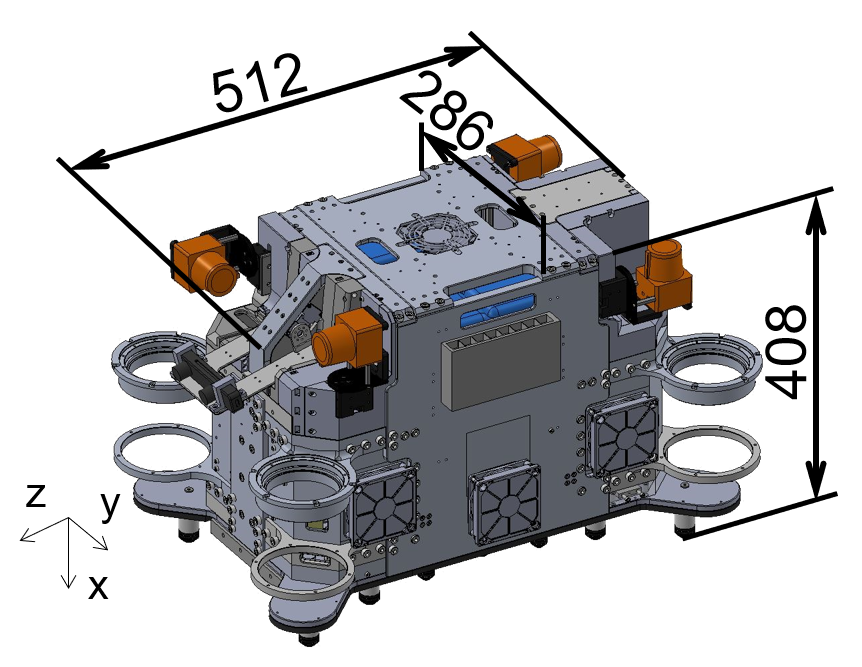
Body structure of WAREC-1R
Details of internal power supply
| Motor driving system |
Controlling system |
||
|---|---|---|---|
| Battery | Battery type | Lithium-ion polymer battery | |
| Rated voltage V |
66.6 | 22.2 | |
| Rated capacity Ah |
22 | 44 | |
| DC-DC converter |
Output voltage V |
60 | 24 |
| Continous current A |
33 | 20 | |
[Research paper (in Japanese)]
・寺江航汰,松原孝将,橋本健二,久保田直行,並木明夫,孫瀟,松澤貴司,今井朝輝,大河原正篤,木村駿介,熊谷健吾,山口航希,内藤博,名村圭祐,佐藤丈弘,村上将嗣,吉田駿也,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第27報:バッテリ内蔵,無線化およびマルチセンサシステムの運用が可能な胴体機構),”第37回日本ロボット学会学術講演会予稿集,1G2-01,東京都,2019年9月.
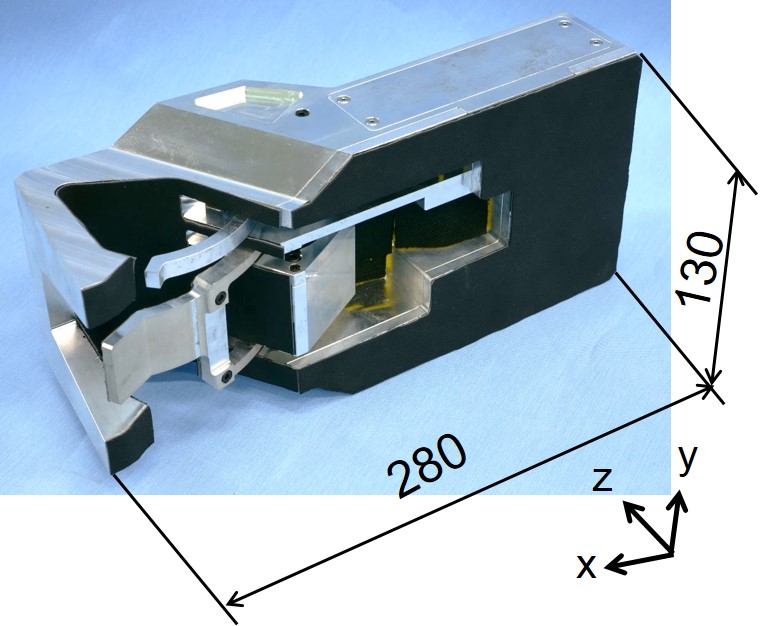
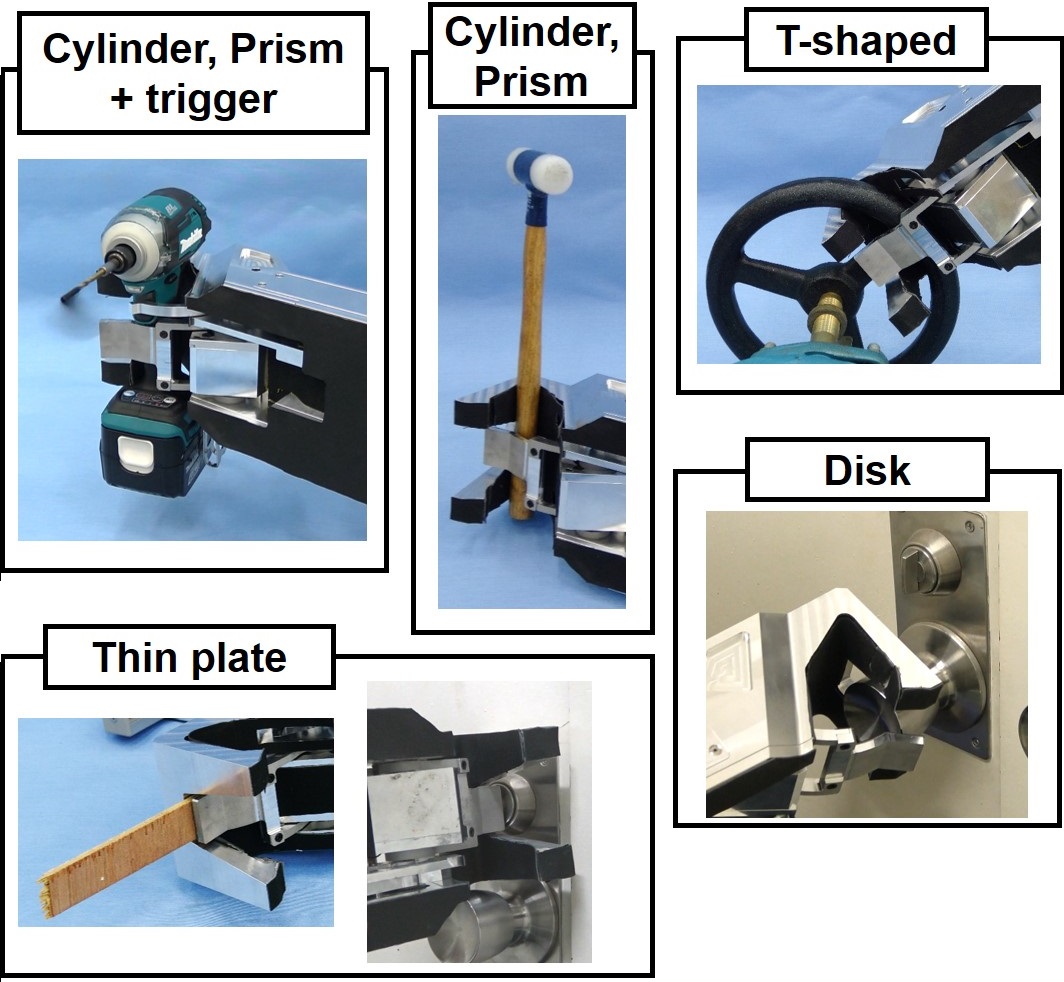
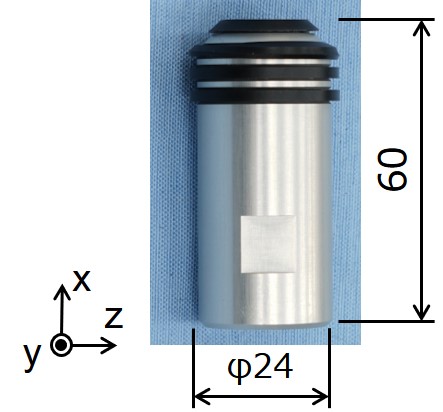
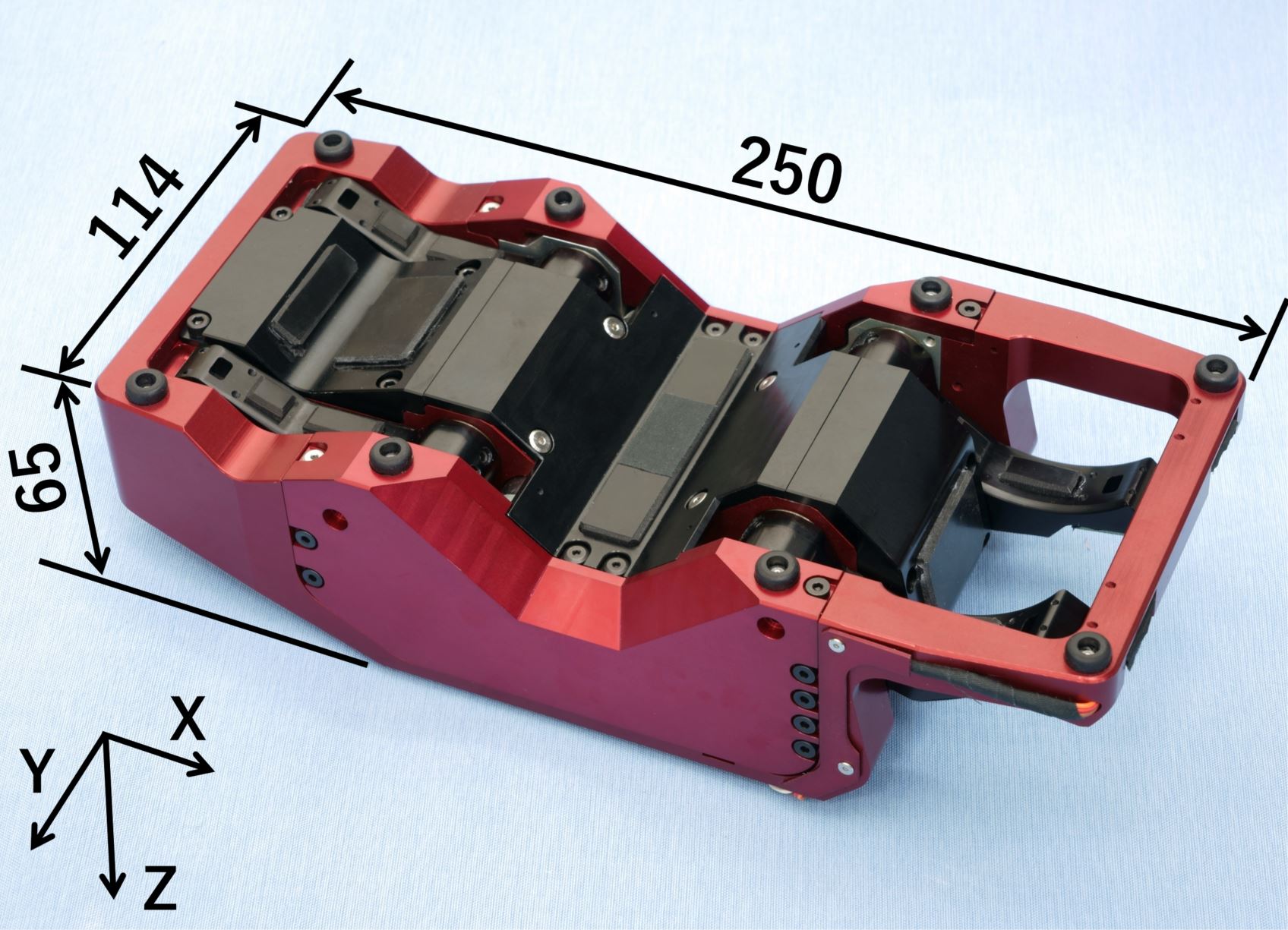
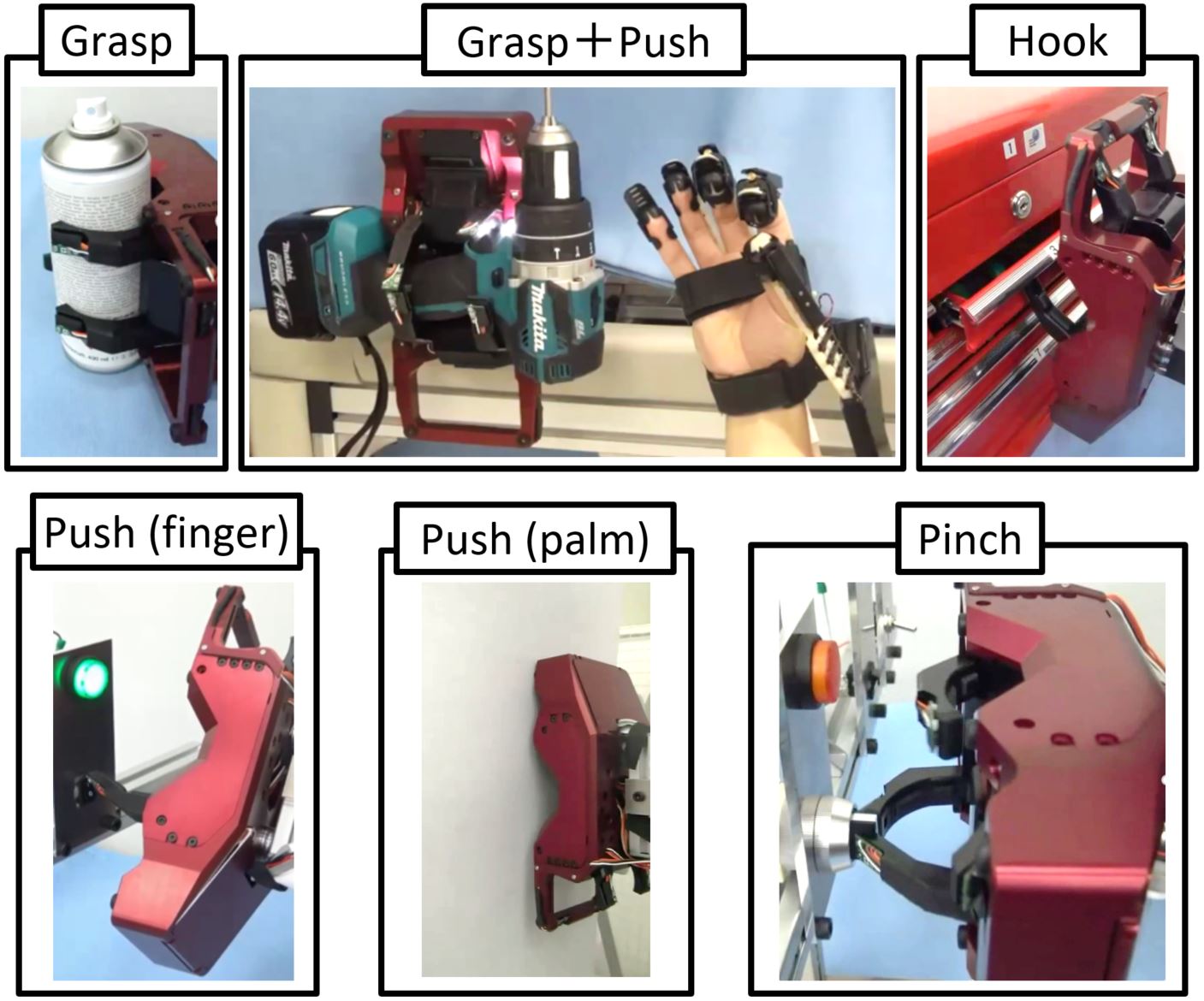
■ End-effector compatible with various locomotion styles and manipulation with fingertips
We developed an end-effector that is compatible with locomotion styles that WAREC-1R is capable of as well as high manipulation capability with fingertips and higher available torque. With finger shape designed for manipulation targets, manipulation of various types of switches and valves as well as tool manipulation in extreme environment are realized.
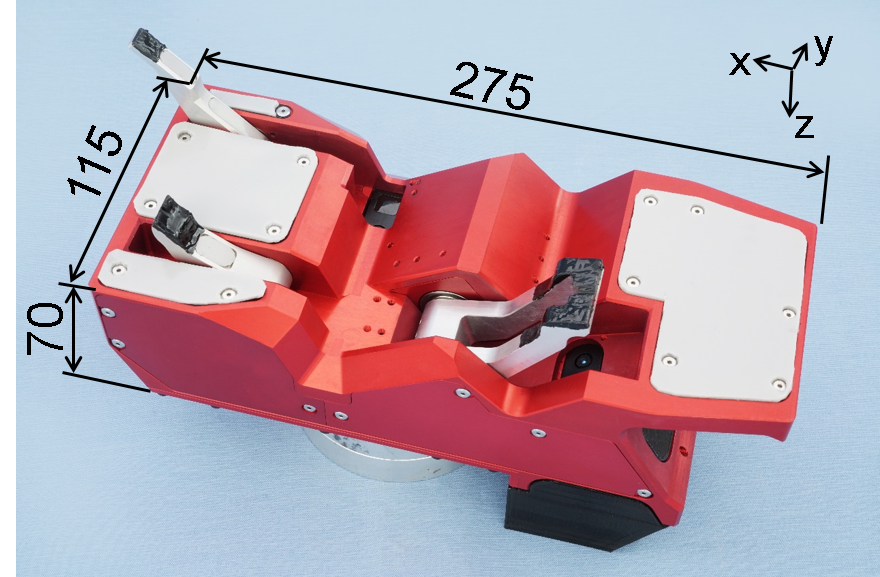
Dimension of end-effector
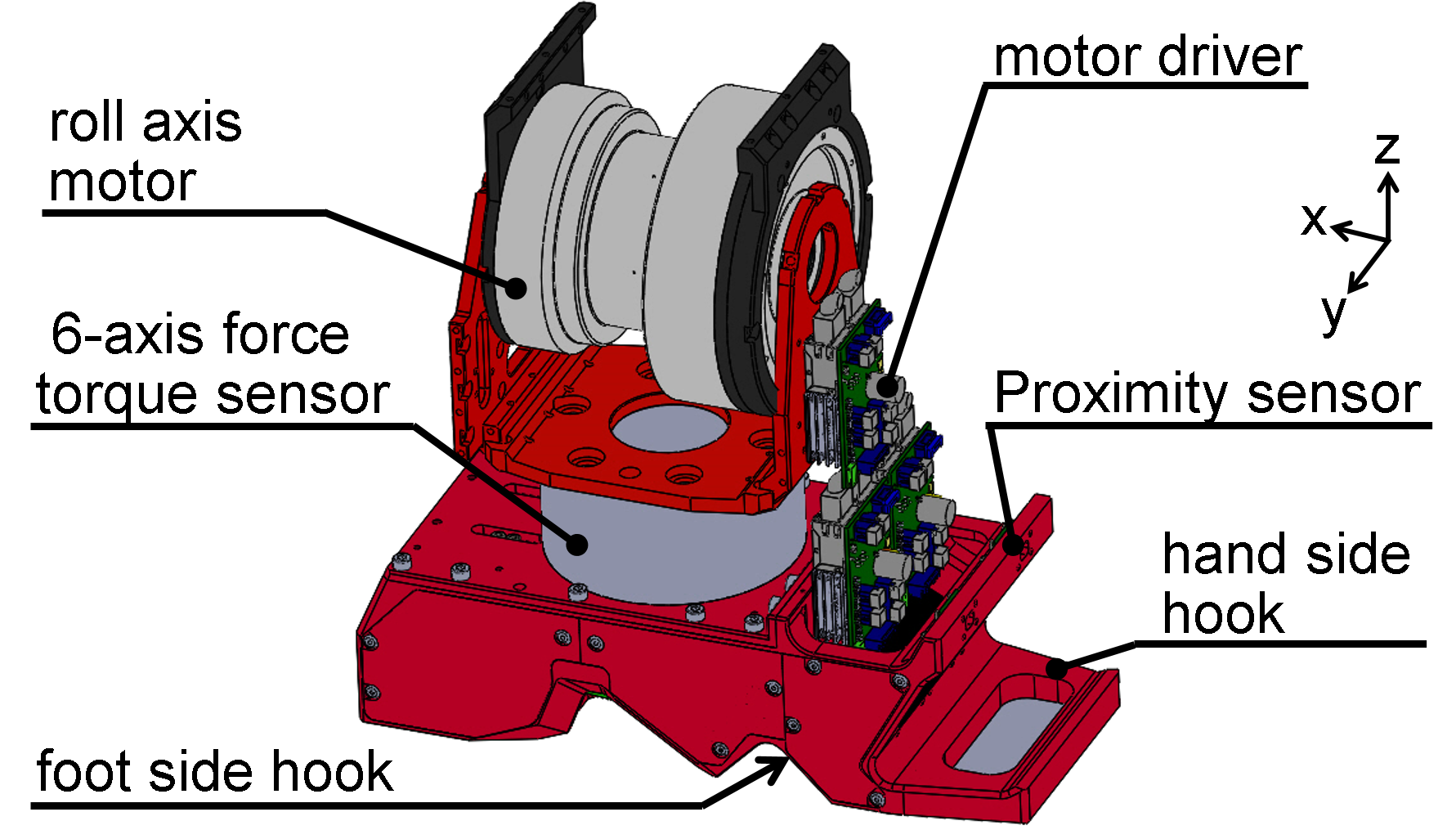
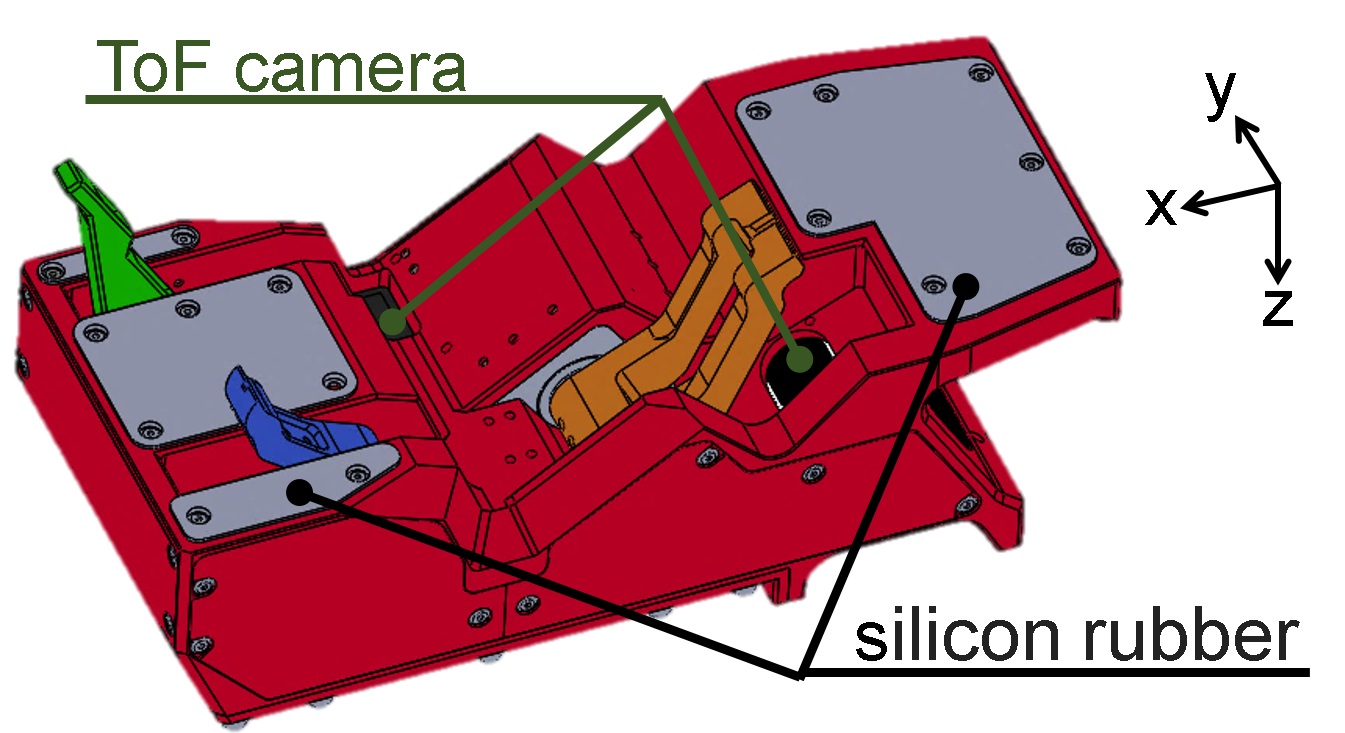
Overview of end-effector
[Research Paper (in Japanese)]
・佐藤丈弘,今井朝輝,橋本健二,孫瀟,松澤貴司,大河原正篤,木村駿介,熊谷健吾,松原孝将,山口航希,内藤博,名村圭祐,寺江航汰,村上将嗣,吉田駿也,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第28報:指先と手掌での作業と多様な移動様式への対応が可能な4肢ロボットのエンドエフェクタ),”第37回日本ロボット学会学術講演会予稿集,1G2-02,東京都,2019年9月.
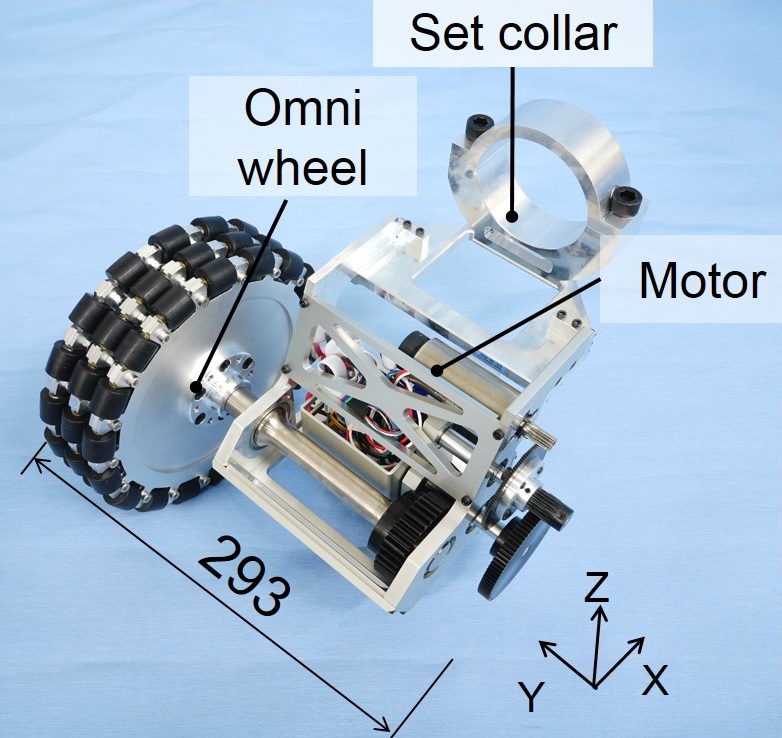
■ Active wheel mechanism capable of expanding wheel driving area
In order to deal with various types of environment (besides flat terrain) expected in wheel driving of the robot, active casters were developed and equipped at the end joint of all limbs. Taking advantage of the features of active casters, their layout as well as the posture transition by Degrees of Freedom in limbs, performance such as getting over a bump with height of 30mm for 3 cases of (1) in forward/backward direction (2) in left/right direction and (3) single limb, moving onto a stone curb with height of 250mm and wheel driving with variable support area are realized.
Our former locomotion capability in wheel driving, such as omnidirectional movement, ramp climbing, driving in narrow spaces, compatibility with leg locomotion are also confirmed, verifying the realization of expansion in area of wheel driving as well as the preservation of the capability as a four-limbed robot.
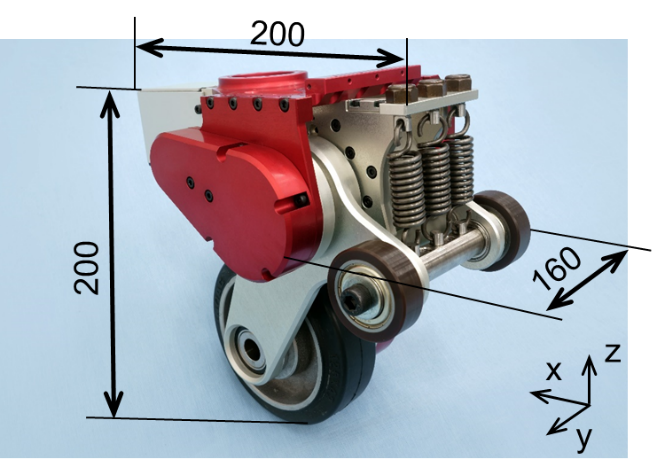
Active wheel mechanism
Wheel driving posture
[Research Paper (in Japanese)]
・村上将嗣,山口航希,橋本健二,孫瀟,松澤貴司,今井朝輝,大河原正篤,木村駿介,熊谷健吾,松原孝将,内藤博,名村圭祐,佐藤丈弘,寺江航汰,吉田駿也,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第29報:4肢ロボットの車輪移動範囲を拡張可能な能動車輪機構),”第37回日本ロボット学会学術講演会予稿集,1G2-03,東京都,2019年9月.
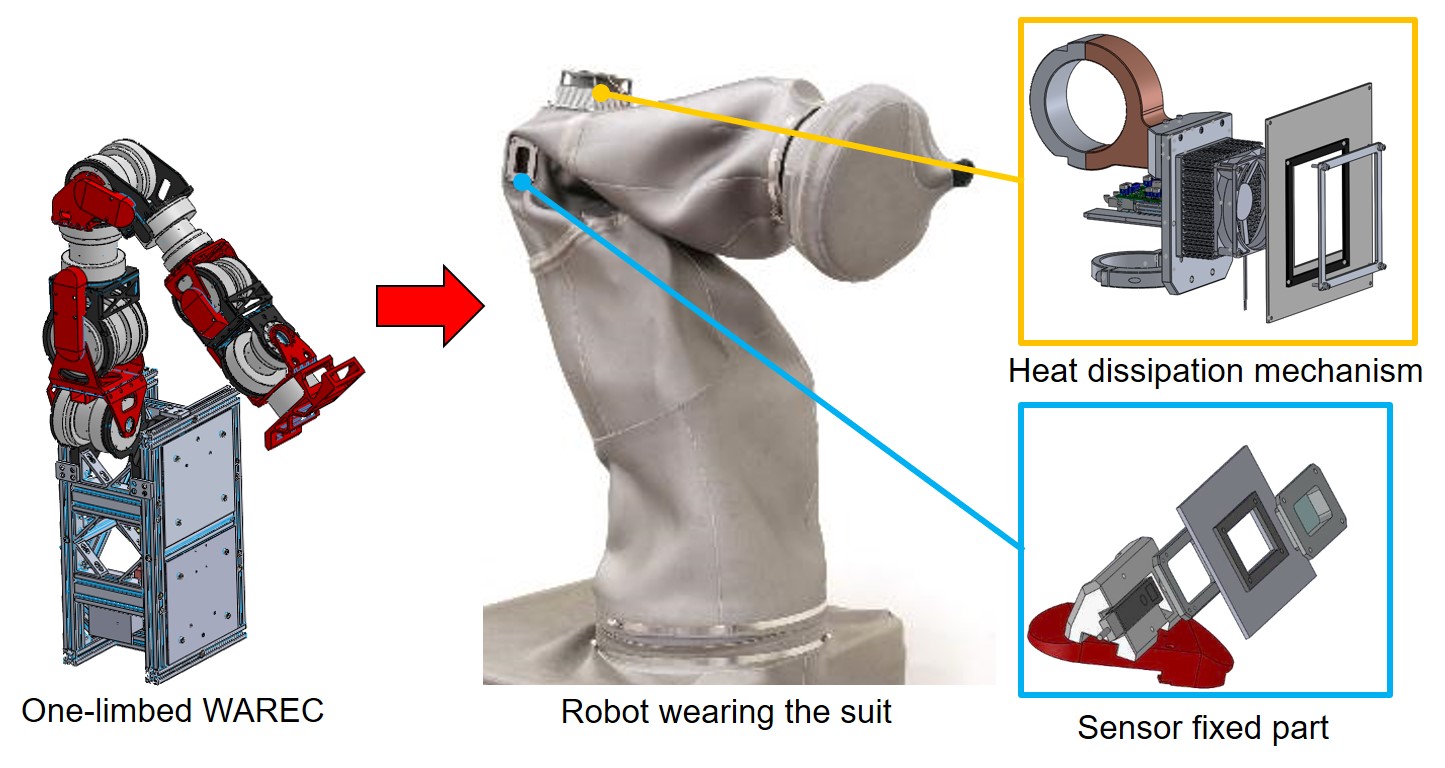
■ Dust & Waterproof robot exterior with compatibility of environment recognition sensors
We developed dust & waterproof exterior of the four-limbed robot that is compatible with environment recognition sensors equipped on the robot. We let the “one-armed WAREC” consisting of 1 limb and the body of robot wear a suit, with infrared transmission filter over the environment recognition sensors and heat dissipation mechanism around the actuator that may overheat after long-time operation. Consequently, compatibility of dust & waterproof and environment recognition as well as the long-time operation of robot without overheating were realized.
[Research Paper (in Japanese)]
・吉田駿也,大河原正篤,橋本健二,孫瀟,松澤貴司,今井朝輝,木村駿介,熊谷健吾,松原孝将,山口航希,内藤博,名村圭祐,佐藤丈弘,寺江航汰,村上正嗣,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第30報:環境認識センサの運用が可能な防塵・防水外装)”, 第37回日本ロボット学会学術講演会予稿集,1G2-04,東京都,2019年9月.
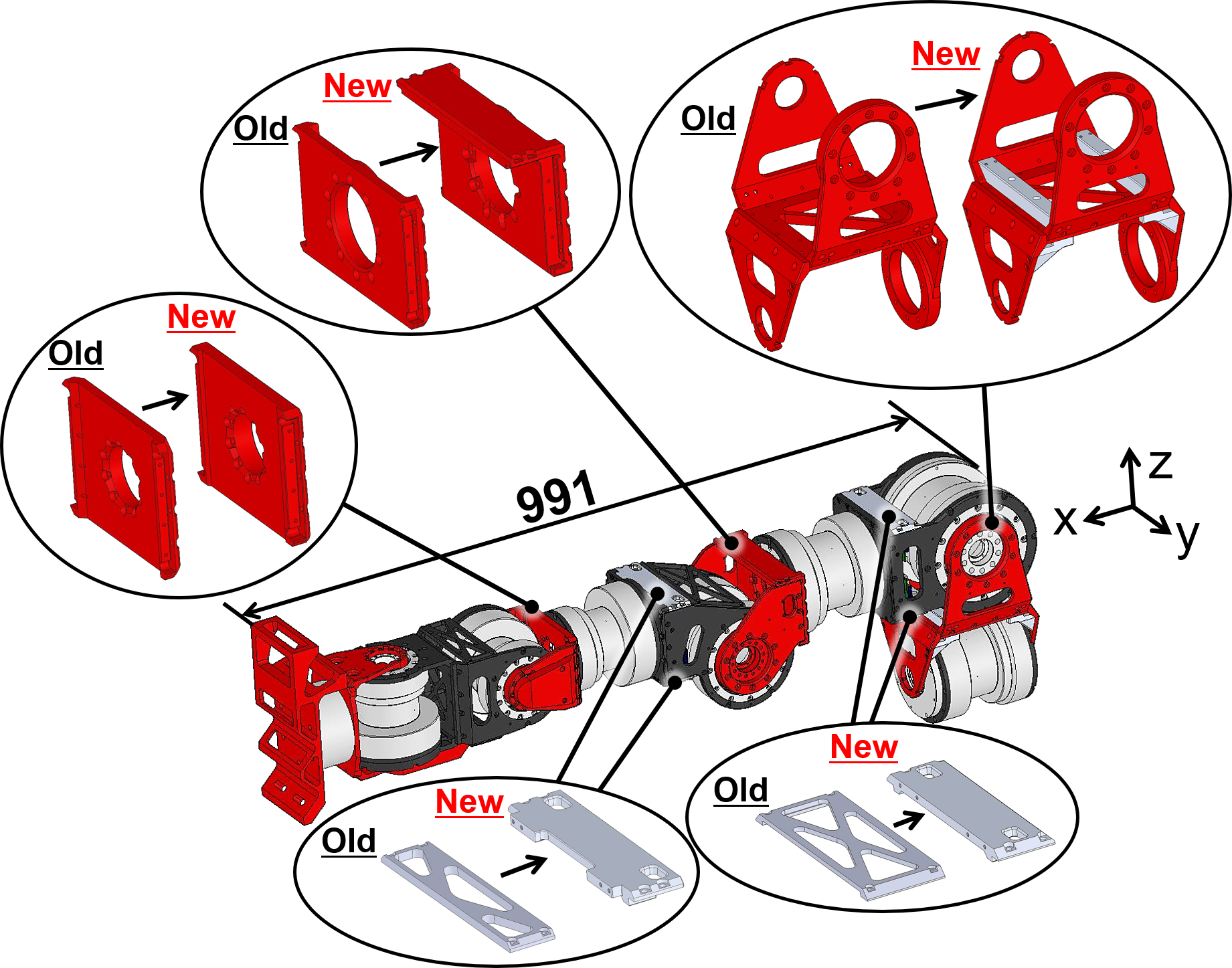
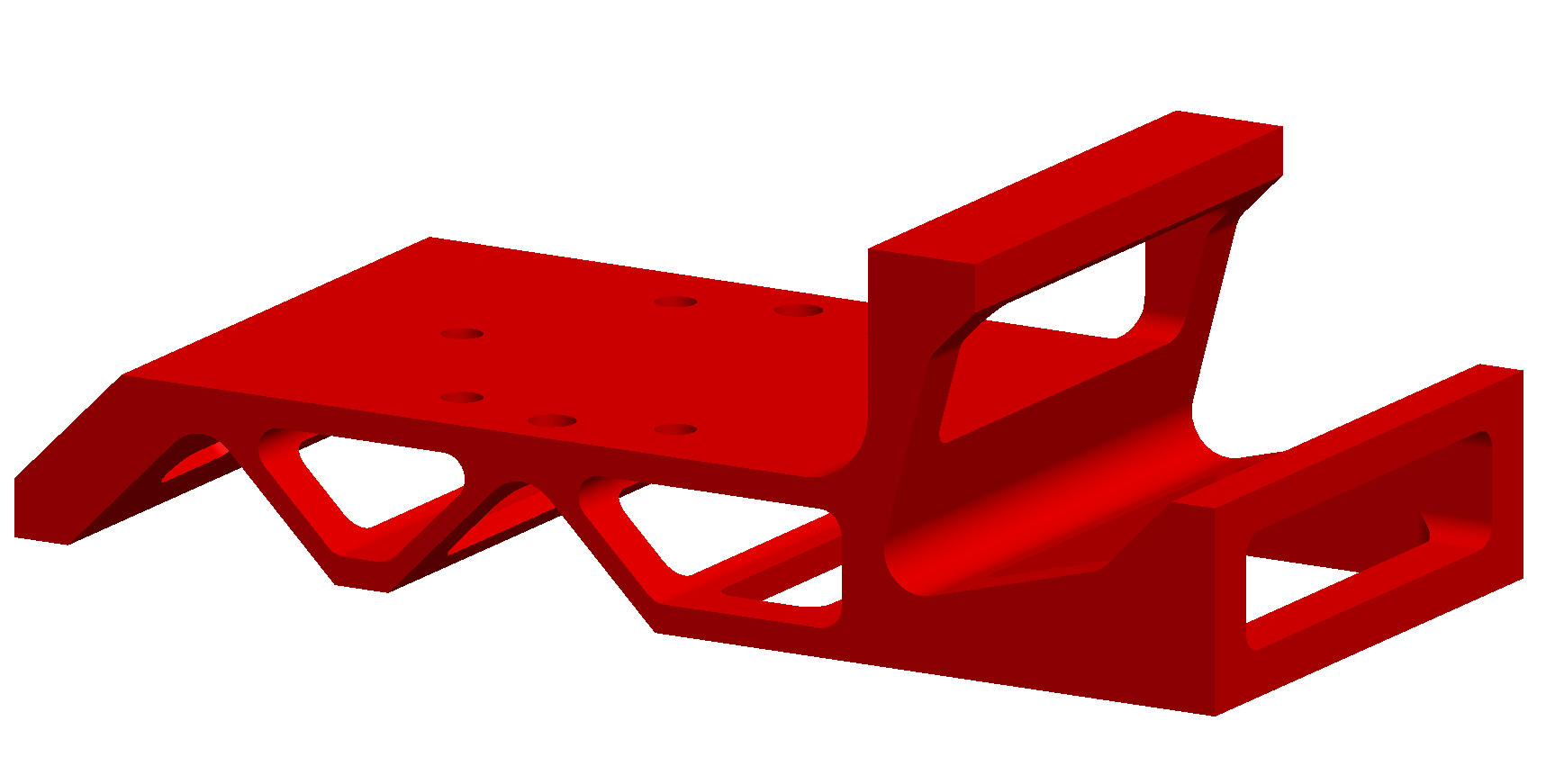
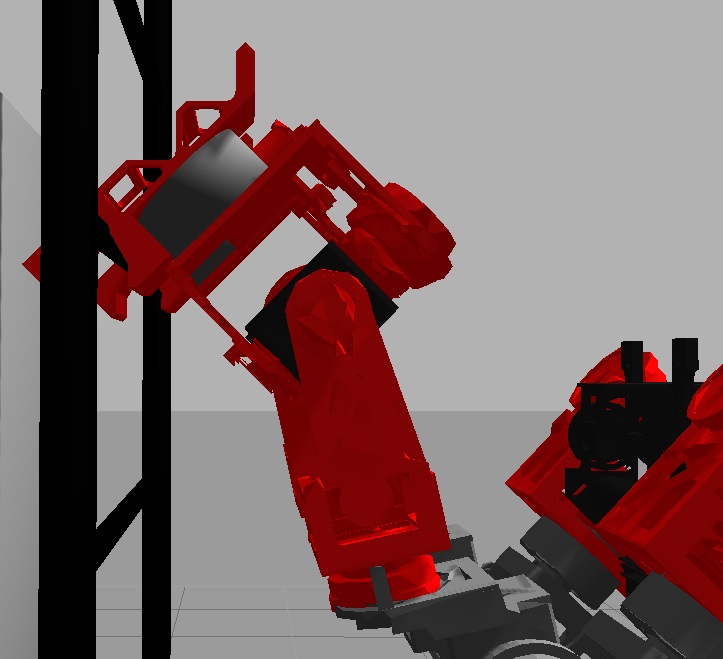
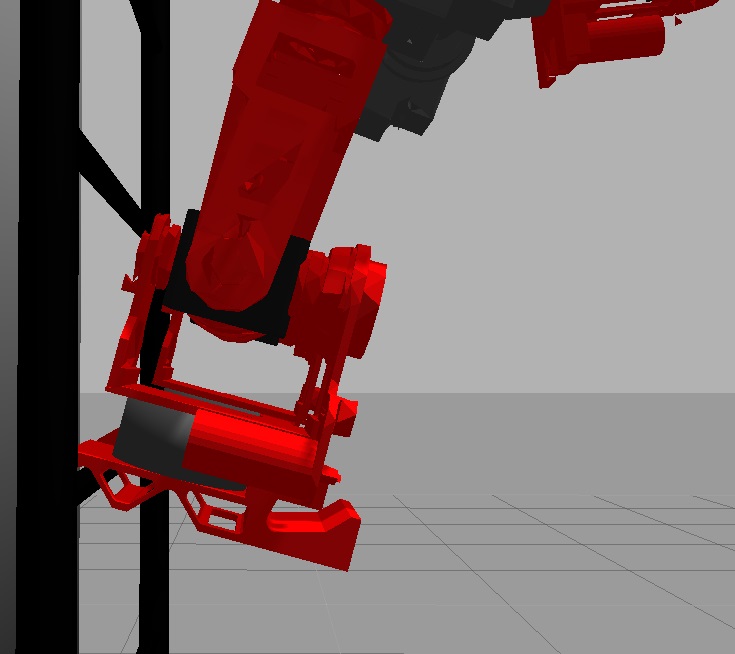
■ Highly rigid leg structure for fast and stable ladder climbing
In order to achieve "1-rung skipping," which enables both high speed and stability in ladder climbing with 3-point contact, error in the position and orientation of the end-effector due to the deformation of legs has been a problem. As its solution, we developed a more rigid leg structure than before. We succeeded in reducing the deformation of the legs by 60% in the desired posture. In this way, we have achieved 1-rung skipping ladder climbing with 3-point contact and increased the speed of ladder climbing to 2.5 times of the former one.
Leg with improved rigidity
Ladder climbing posture
[Research paper (in Japanese)]
・伊藤明,孫瀟,松澤貴司,内藤博,名村圭祐,佐藤丈弘,寺江航汰,村上将嗣,吉田駿也,近藤貴久,高西淳夫,橋本健二,“極限環境下で作業可能な災害対応ロボットの開発(第37報:はしご昇りの速度・安定性向上を可能とする4肢ロボットの脚部剛性改良)”, 第38回日本ロボット学会学術講演会予稿集,3F2-04,東京都,2020年10月.
WAREC-1 (WAseda REsCuer-No.1, 2015-2018)
Each limb of WAREC-1 has 3 DoF(Degree of Freedom)s for shoulder/ thigh, 1 DoF for elbow/ knee and 3 DoFs for wrist/ ankle. This robot has 4 commonly structured limbs. Its high output is realized by high power actuator units with rotor, stator, encoders and reduction gear all embeded inside. Its decreased wiring is realized by distributed control.
WAREC-1(WAseda REsCuer-No.1)
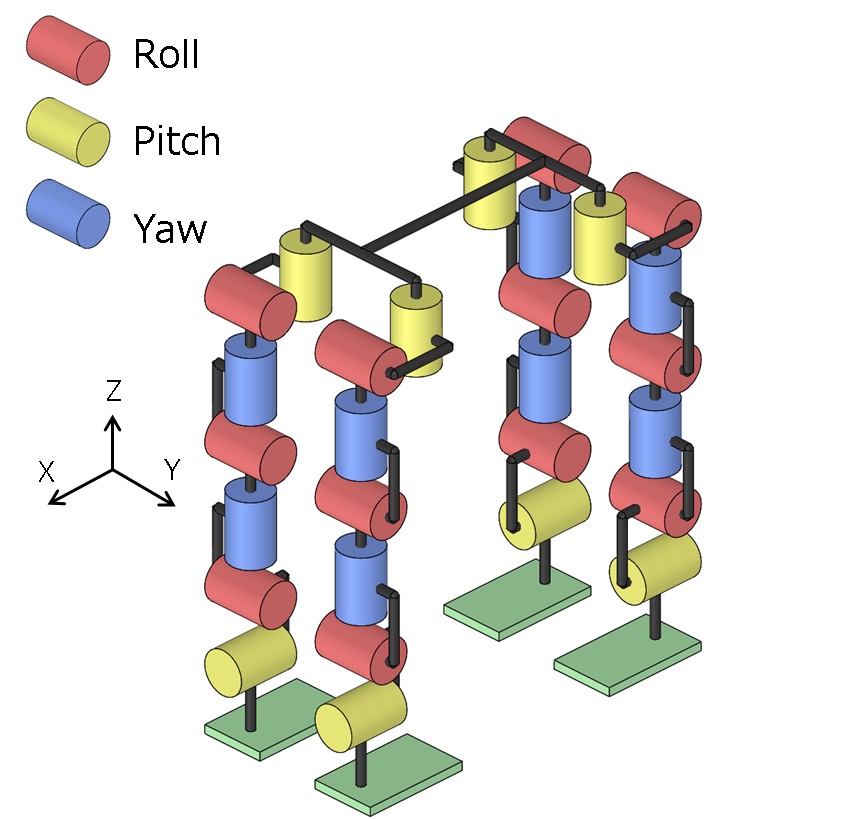
Configuration of Degrees of Freedom
| Degrees of Freedom |
Shoulder/ Thigh : 3 DoFs x 4 limbs Elbow/ Knee : 1 DoF x 4 limbs Wrist/ Ankle : 3 DoFs x 4 limbs |
|---|---|
| Total:28 DoFs | |
| Sensor |
6-axis force/torque IMU |
| Actuator | DC motor |
| Mass kg | 150 |
[Research Papers]
・Kenji Hashimoto, Shunsuke Kimura, Nobuaki Sakai, Shinya Hamamoto, Ayanori Koizumi, Xiao Sun, Takashi Matsuzawa, Tomotaka Teramachi, Yuki Yoshida, Asaki Imai, Kengo Kumagai, Takanobu Matsubara, Koki Yamaguchi, Gan Ma and Atsuo Takanishi, "WAREC-1 - A Four-Limbed Robot Having High Locomotion Ability with Versatility in Locomotion Styles", Proceedings of The 15th IEEE International Symposium on Safety, Security, and Rescue Robotics 2017 (SSRR 2017), pp. 172-178, Shanghai, China, October, 2017.
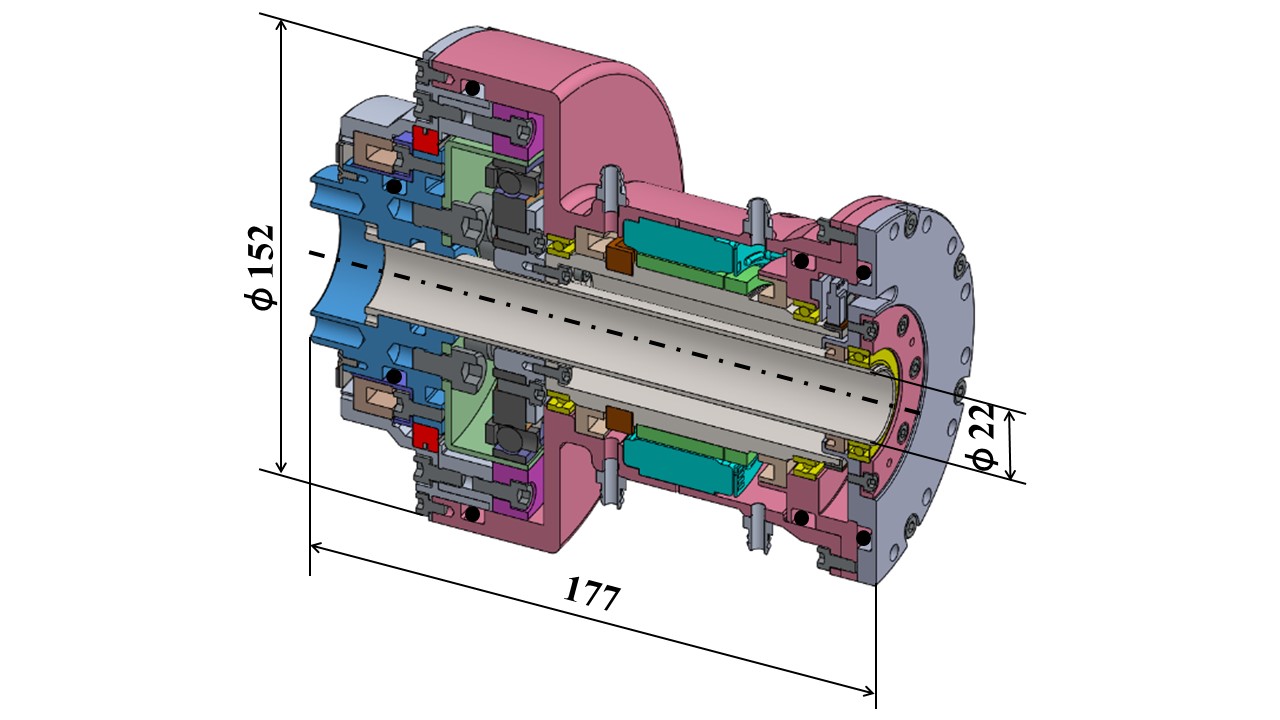
■ Actuator units with high power and hollow structure
We developed high power actuator units with frameless motor and wave gear reducer. They have hollow structure for reducing exposed wiring because disaster response robots are required to move and work in extreme environment.
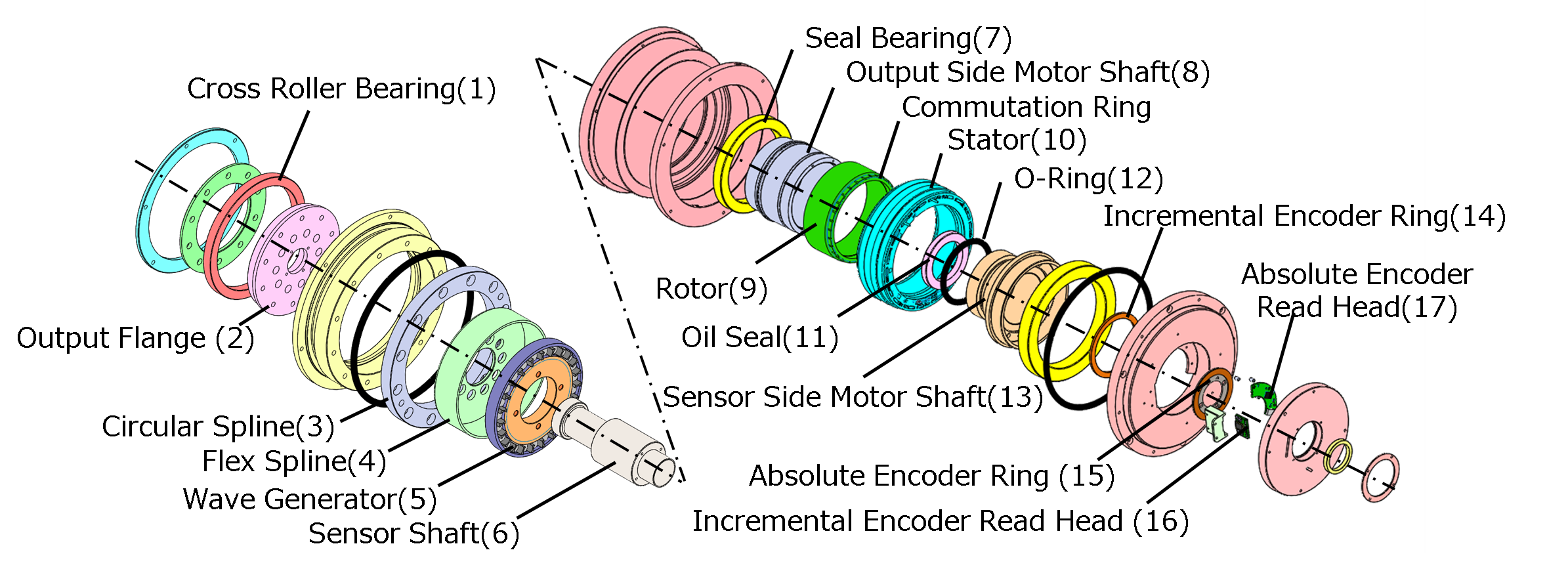
Exploded view of the actuator unit
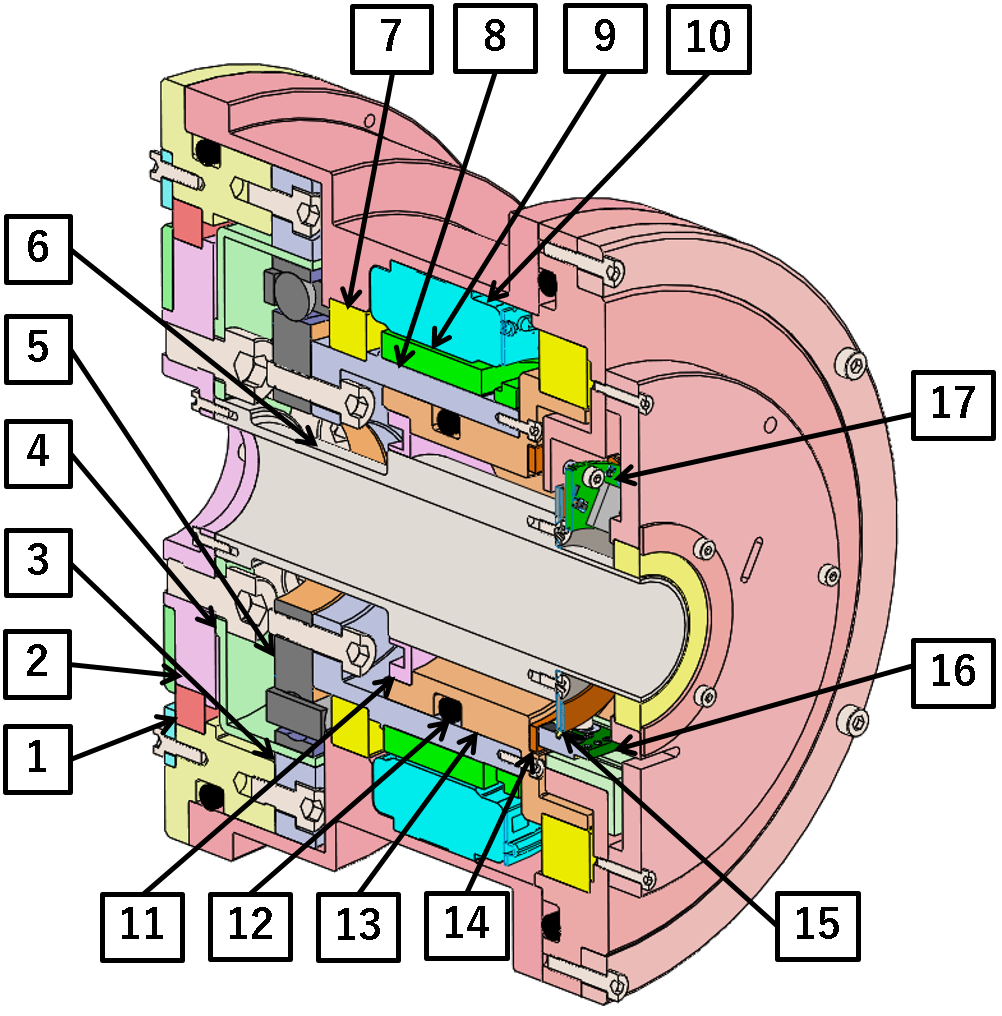
Sectional view of the actuator unit
[Research Paper (in Japanese)]
・木村駿介,酒井伸明,橋本健二,孫瀟,小泉文紀,濱元伸也,寺町知峰,松澤貴司,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第10報:中空構造を持つ高出力アクチュエータユニット),”第34回日本ロボット学会学術講演会予稿集,2C2-01,山形県,2016年9月.
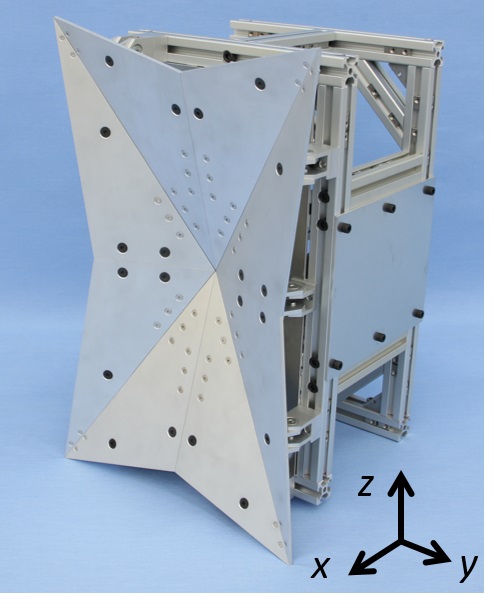
■ Body structure for grounding
We developed body structure for stable grounding in crawling motion. All electrical components can be contained in the body without exposure.
Overall view
Sectional view of body structure
[Research Paper (in Japanese)]
・酒井伸明,小泉文紀,橋本健二,松澤貴司,孫瀟,濱元伸也,木村駿介,寺町知峰,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第8報:匍匐移動を目的とした4肢ロボットの胴体構造),”第34回日本ロボット学会学術講演会予稿集,2C1-06,山形県,2016年9月.
■ Four-limbed robot's torso containing linear spikes
While crawling, slip between torso and ground makes it difficult for the robot to move along the planned direction, which is an issue that has to be solved. Thus, we developed the robot's torso mechanism containing linear spikes to reduce slip distance by passively hooking the spikes to rubbles. In evalution test, it was confirmed that the linear-spike torso reduced slip distance while crawling, which resulted in crawling speed becoming 1.2 times faster than the crawling with previous torso.
Developed torso containing linear spikes
Designed linear spike
[Research Paper (in Japanese)]
・松原孝将,松澤貴司,橋本健二,孫瀟,寺町知峰,木村駿介,酒井伸明,吉田雄貴,今井朝輝,熊谷健吾,山口航希,名村圭祐,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第16報:腹ばい移動時の滑動を低減する4肢ロボットの胴体機構),”第35回日本ロボット学会学術講演会予稿集,1K1-02,埼玉県,2017年9月.
■ Active wheel mechanism for four-limbed robot
We developed active wheel mechanism for four-limbed robot to move rapidly on flat road. The robot can drive at 2km/h on flat road with wheels equipped, which is 20 times faster than crawling motion on flat road. Futhermore, we comfirmed wheel driving through 800mm width narrow space, crossing over 50mm height step ,and wheel driving on 10deg inclined slope. In addition, we realized the omni-directional movement with omni wheels, and vertical ladder climbing and crawling on rubbles with wheels equipped.
 Omni wheel driving mode
Omni wheel driving mode
 Active wheel mechanism
Active wheel mechanism
[Research Paper (in Japanese)]
・山口航希,松澤貴司,橋本健二,孫瀟,寺町知峰,木村駿介,酒井伸明,吉田雄貴,今井朝輝,熊谷健吾,松原孝将,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第17報:4肢ロボットの移動速度を向上する能動車輪機構),”第35回日本ロボット学会学術講演会予稿集,1K1-03,埼玉県,2017年9月.
■ End-effector capable of both locomotion and simple manipulation
We developed end-effector capable of both locomotion and simple manipulation. This end-effector maximize the advantage for the feature of 4 commonly structured limbs, playing the role of both hand and foot.
 Developed end-effector
Developed end-effector
 Manipulations using developed end-effector
Manipulations using developed end-effector
[Research Paper (in Japanese)]
・今井朝輝,寺町知峰,橋本健二,松澤貴司,孫瀟,木村駿介,酒井伸明,吉田雄貴,熊谷健吾,松原孝将,山口航希,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第18報:フック形状を有し移動と単純な作業に使用可能な4肢ロボットのエンドエフェクタ),”第35回日本ロボット学会学術講演会予稿集,1K2-02,埼玉県,2017年9月.
■ Immersion cooled(oil cooled) actuator units
Although disaster response robots need high power actuators to perform powerful tasks, the higher output motors have the more heat is created. Thus, we developed actuator units with ligheter weight and higher output than previous ones, applying "immersion cooling"-cooling the motor with oil, and commonizing the oil coolant and luburicant for reduction gears.
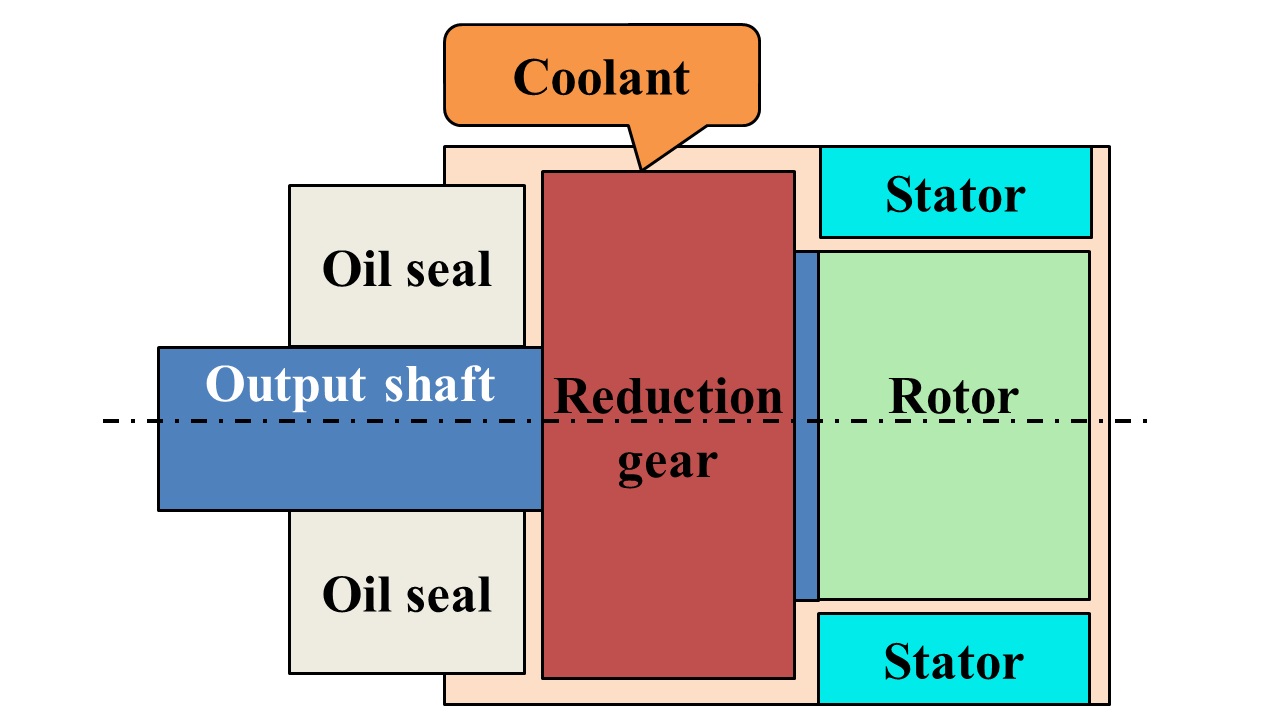
Concept of immersion cooled actuator unit
Overview of immersion cooled actuator unit
Sectional view of immersion cooled actuator unit
[Research Paper (in Japanese)]
・橋本健二,神永拓,熊谷健吾,寺町知峰,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第14報:浸漬冷却を利用したアクチュエータユニットの構想),”日本機械学会ロボティクス・メカトロニクス講演会2017(ROBOMECH2017),1P1-P04,福島県,2017年5月.
・熊谷健吾,橋本健二,寺町知峰,松澤貴司,木村駿介,酒井伸明,孫瀟,吉田雄貴,今井朝輝,松原孝将,山口航希,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第19報:浸漬冷却可能な アクチュエータユニットの製作と評価),”第35回日本ロボット学会学術講演会予稿集,1K2-03,埼玉県,2017年9月.
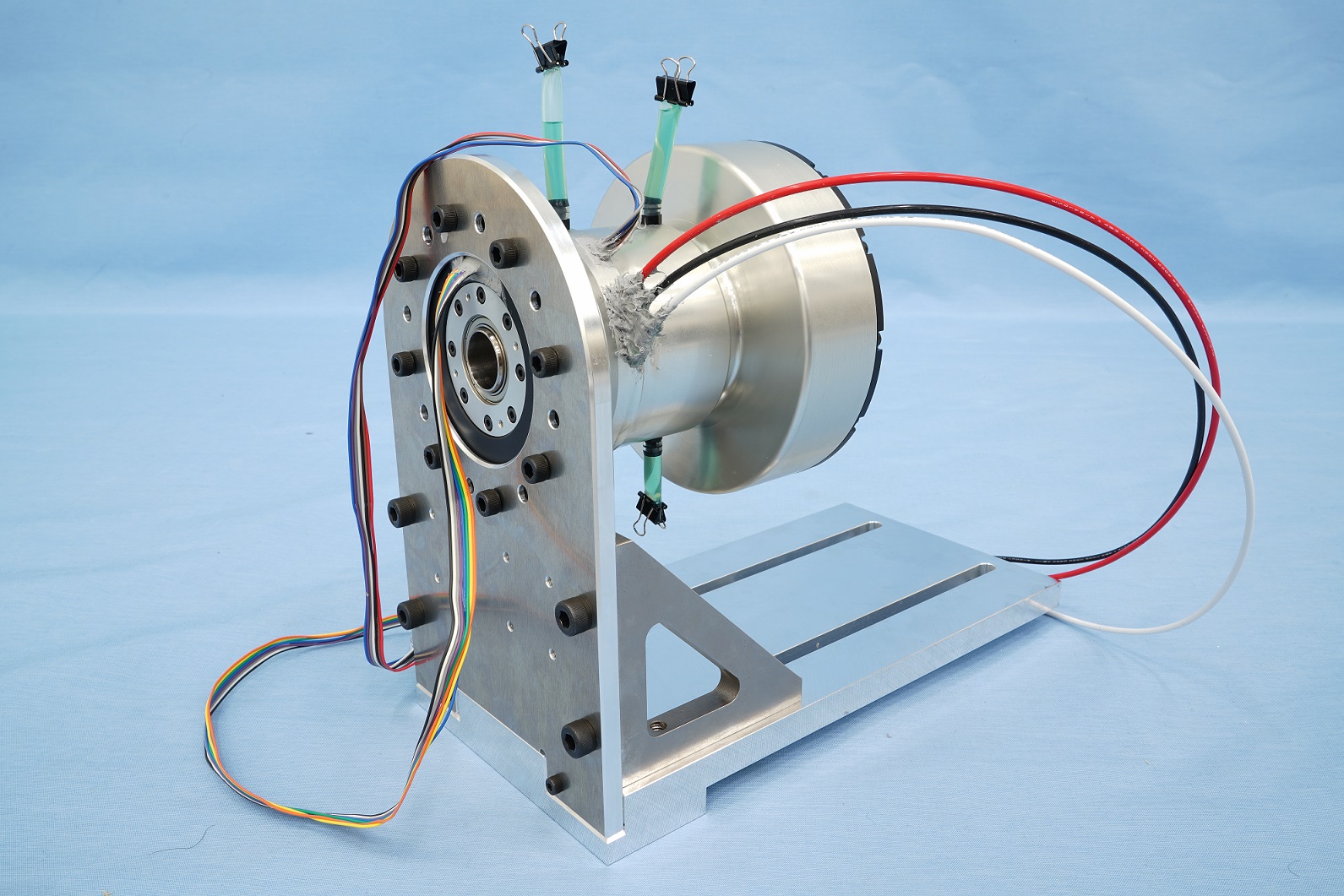
■ Actuator unit for vacuum environment
We reinforced the developed actuator unit for vacuum environment for the first step toward development of robot for space environment. We realized continous motor driving on approximately 10-3Pa vacuum environment for 100 hours.
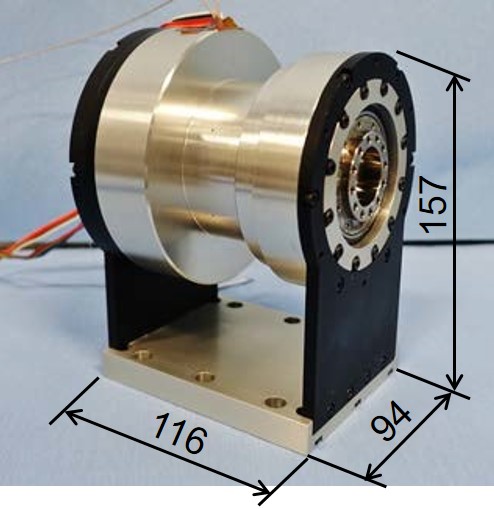
Overview of the vacuum actuator unit
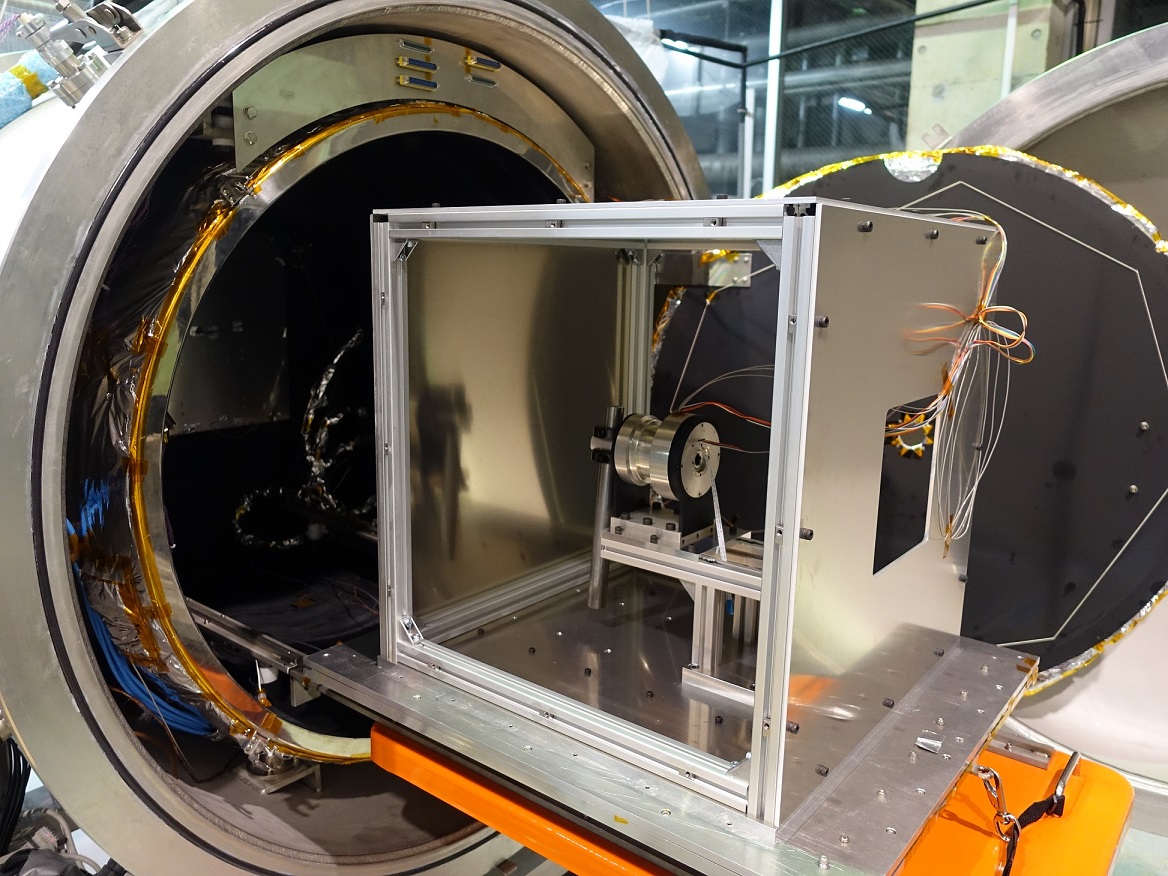
Vacuum chamber and vacuum actuator unit after experiments
・橋本健二,酒井伸明,木村駿介,熊谷健吾,今井朝輝,松澤貴司,吉田雄貴,山口航希,高西淳夫,“宇宙ロボットに向けた真空対応アクチュエータユニットの開発と真空試験,”第35回日本ロボット学会学術講演会予稿集,1E1-02,埼玉県,2017年9月.
■ Torso mechanism to improve locomotion ability
We developed a torso mechanism with fixed spikes for the purpose of improving the locomotion ability. By positively utilizing the spikes, it is possible to step over uneven terrains, stairs, or steps higher than its limbs without slipping down or falling over.
Body with fixed spikes
Fixed spike
[Research Paper (in Japanese)]
・名村圭祐,松澤貴司,橋本健二,孫瀟,酒井伸明,林翔太,吉田雄貴,今井朝輝,大河原正篤,熊谷健吾,松原孝将,山口航希,内藤博,高木一輝,高西淳夫,"極限作業下で作業可能な災害対応ロボットの開発(第24報:胴体接地を活用した段差踏破が可能な4肢ロボットの胴体機構),"第36回日本ロボット学会学術講演会予稿集,1D3-04,愛知県,2018年9月.
■ End-effector compatible with locomotion and manipulation (remote operation)
We have developed end-effectors that are compatible with various locomotion styles and remote operation of WAREC-1. With 3 active degrees of freedom, differential mechanism and hook-shaped structures, these end-effectors achieve a variety of manipulation tasks and adaptive grasping in addition to locomotion such as climbing vertical ladders and traversing uneven terrains.
 Developed end-effector
Developed end-effector
 Capable of performing various tasks
Capable of performing various tasks
[Research Paper (in Japanese)]
・内藤博,酒井伸明,橋本健二,毛利哲也,並木明夫,孫瀟,松澤貴司,林翔太,吉田雄貴,今井朝輝,大河原正篤,熊谷健吾,松原孝将,山口航希,名村圭祐,高木一輝,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第23報:4肢ロボットの多様な移動様式と遠隔作業に対応可能なエンドエフェクタ),”第36回日本ロボット学会学術講演会予稿集,1D3-07,愛知県,2018年9月.
Prototype of four-limbed robot (2014)
Each limb of this robot has 3 DoFs for shoulder/ thigh, 1 DoF for elbow/ knee and 3 DoFs for wrist/ ankle. The trunk has 1 DoF. It has 4 commonly structured limbs. Therefore, if one limb is broken, the robot can keep moving with other available limbs.
Prototype of four-limbed robot(2014)
 Configuration of degrees of freedom
Configuration of degrees of freedom
| Degrees of Freedom |
Shoulder/ Thigh : 3 DoFs x 4 limbs Elbow/ Knee : 1 DoF x 4 limbs Wrist/ Ankle : 3 DoFs x 4 limbs Trunk : 1 DoF |
|---|---|
| Total:29 DoFs | |
| Sensor | 6-axis force/torque sensor |
| Actuator | DC motor |
| Mass kg | 110 |
Biped Walking
Quadruped Walking
Crawling
The biggest characteristic of this robot is the design of end-effector. The end-effector has three grooves so that it can be used as both hand and foot.
End-effector
End-effector
(Used as hand)
End-effector
(Used as foot)
[Research Papers]
・Kenji Hashimoto, Takashi Matsuzawa,Tomotaka Teramachi, Kazuhito Uryu, Xiao Sun, Sshinya Hamamoto, Ayanori Koizumi and Atsuo Takanishi, “A Four-Limbed Disaster-Response Robot Having High Mobility Capabilities in Extreme Environments,” Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017), pp. 5398–5405, Vancouver, Canada, September, 2017.
■ Climbing a ladder with 3-point contact
■ Transition from vertical ladder to catwalk
After reaching the highest rung, our robot can go through the side rails and move from the vertical ladder to catwalk over the ladder.