Classification of extreme environment
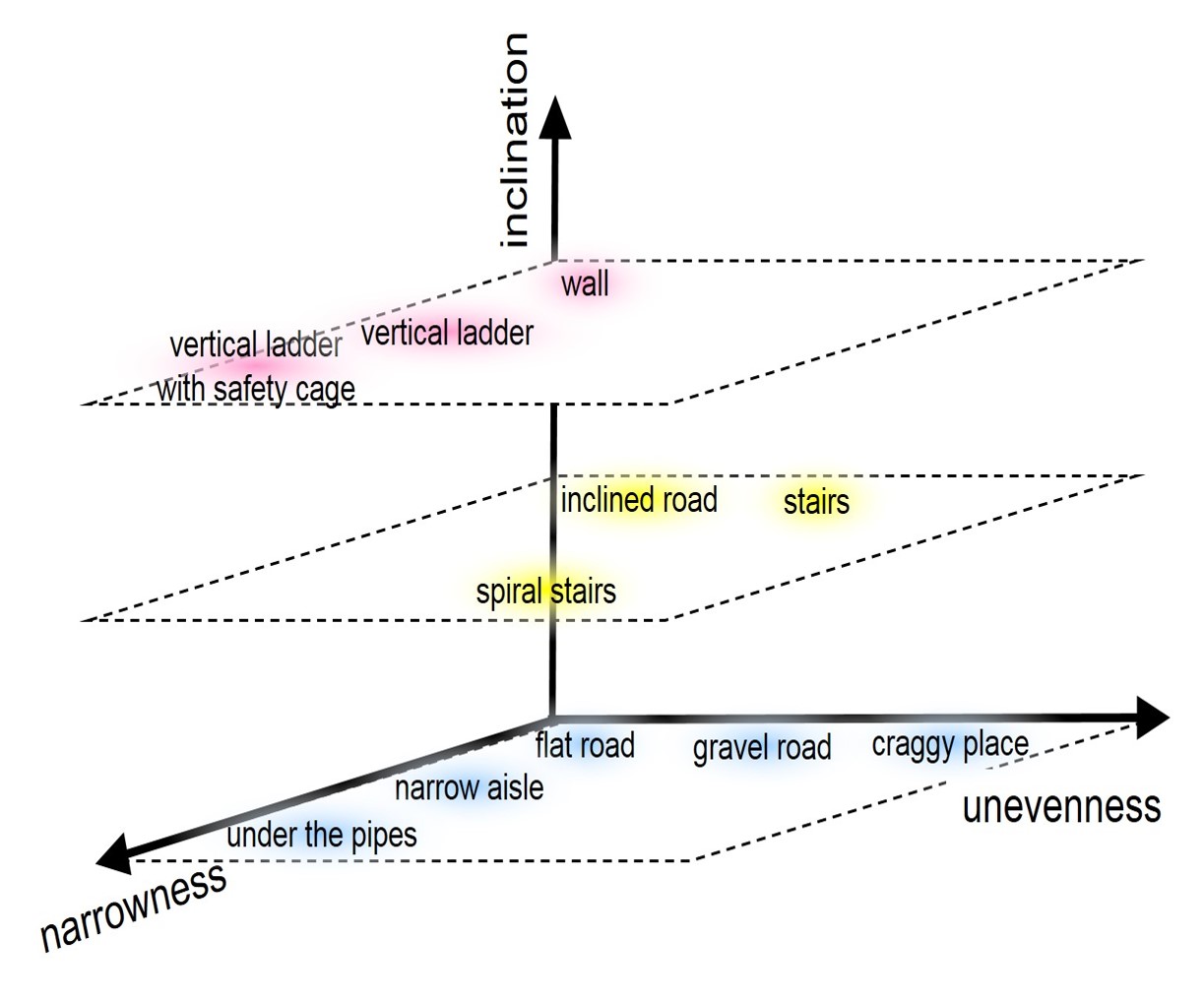
From our perspective, the feature of extreme environment can be described by three indexes: "unevenness", "narrowness" and "inclination" according to the shape of environment. We focus on uneven terrain that is difficult to be overcome by biped robots and vertical ladders that have the highest inclination.
Classification of extreme environment
Crawling motion
■ Proposition of crawling motion
In extreme environment crawling motion is effective at the point of reducing the shock in the case of falling, thus decreasing the possibility of malfunction in locomotion on uneven terrain. Uneven rubble ground is generated in simulator, with the application of crawling method to the four-limbed robot developed by us to verify whether proposed method is effective or not for the locomotion on rubble ground. It is confirmed from the simulation results that the proposed method is applicable to our four-limbed robot and locomotion on uneven terrain is effective.
Crawling motion
■ Control of moving direction in crawling and foot trajectory modification
There may be error between the desired direction and the actual moving direction of the robot when it performs crawling motion on uneven terrain. Therefore, we developed the direction control method which can adjust the step length of each foot to reduce the error between desired direction and actual moving direction of the robot. There may also be collision between feet of the robot and the ground due to the collapse of road surface, which prevents the robot from performing crawling motion on rough terrain. Therefore, we developed the foot trajectory modification control method based on data from sensors equipped on the robot.
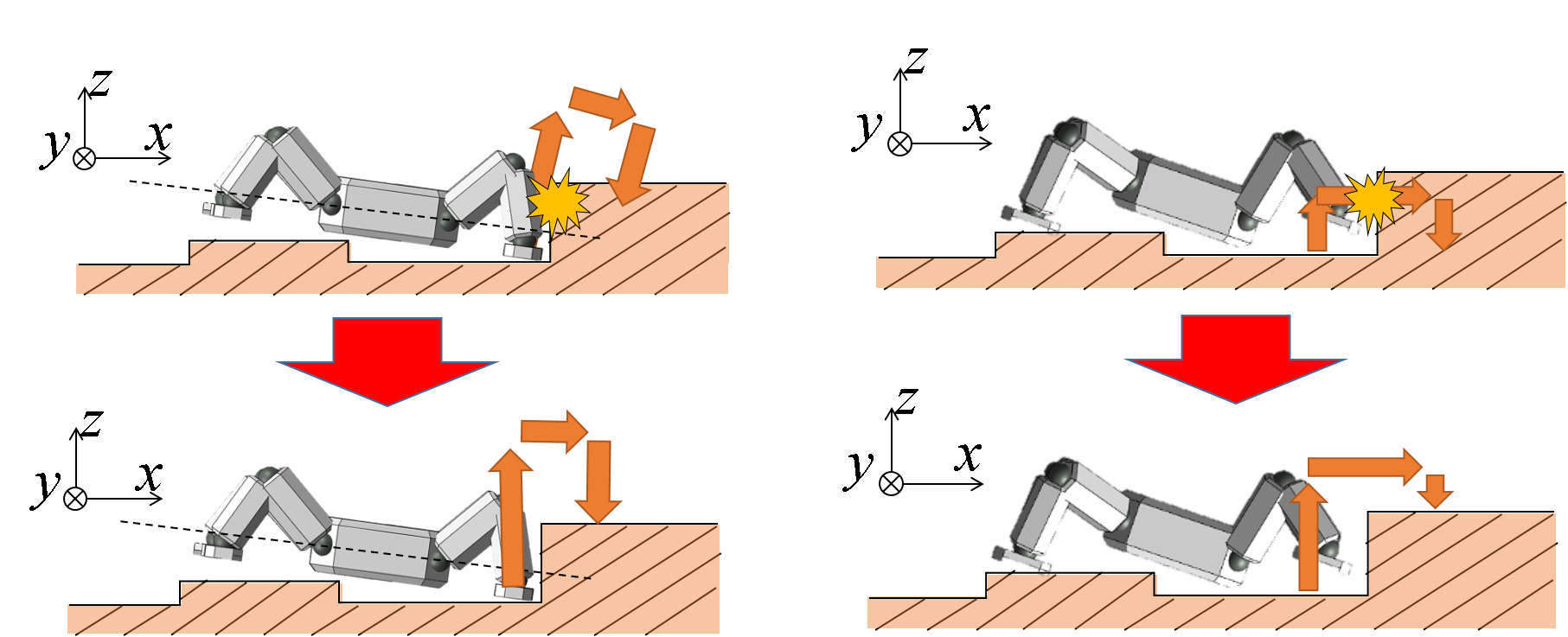
Foot trajectory modification control
■ Teleoperation system using past image records for crawling robot
Because the breakdown or collision between the robot and external field is assumed in the operation of the robot, it is disirable for operators to easily recognize not only external field image but also the state of robot. Thus we integrated four-limbed robot "WAREC-1"'s system with teleoperation system using past image records developed by Matsuno Lab. in Kyoto Univ. and Morita & Sato Lab. in Nagoya Institute of Technology and localization technology developed by Dr.Sasaki in AIST. In the evaluation tests, we realized producing bird's-eye view image and teleoperation of the crawling robot.
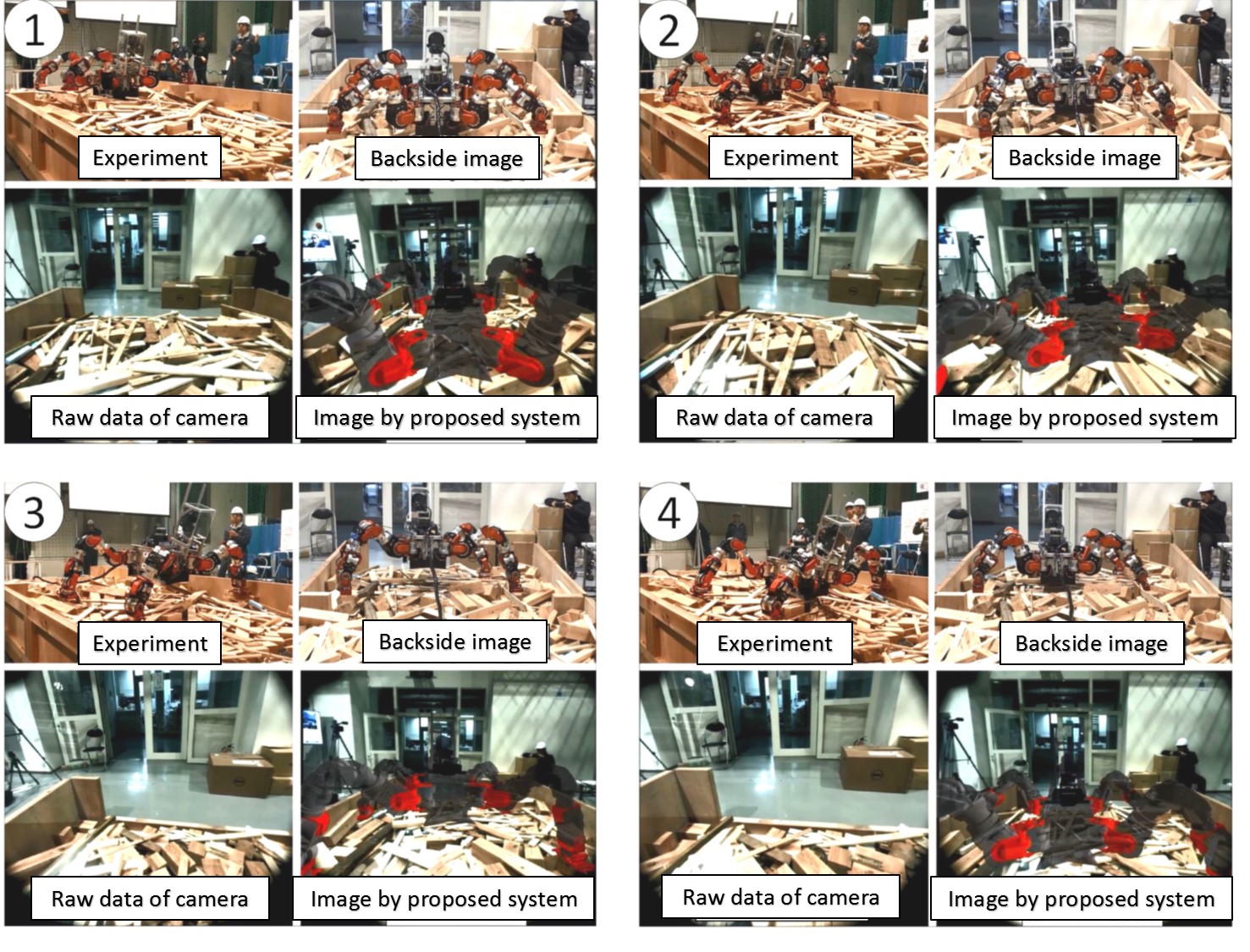 Bird's-eye view image of the crawling robot
Bird's-eye view image of the crawling robot
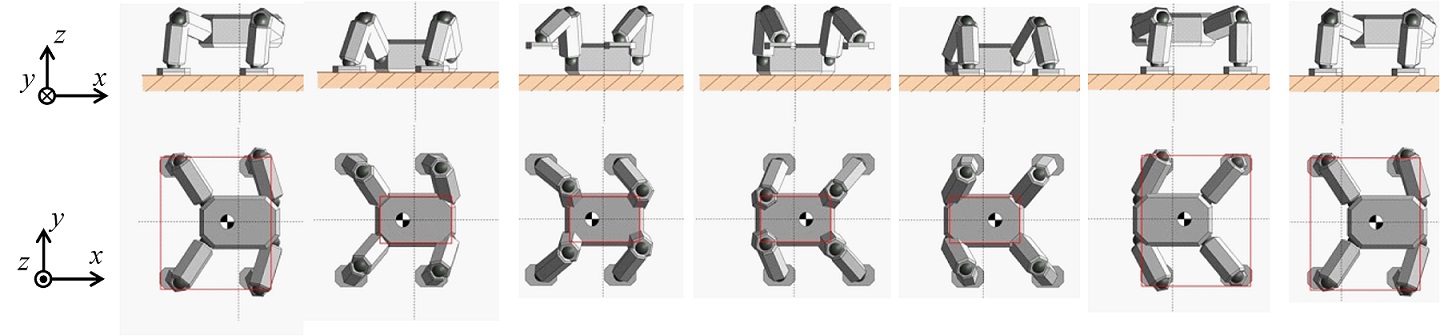
■ Crawling gait generation method based on stability index
When limbed-robot crawls by alternately contacting its body and limbs to ground, collision between swinging limbs and ground often prevents the robot from crawling because the robot gets easier to fall by the smaller contacting area during body contacting phases. Thus, we allowed the robot to determine the crawling gait based on stability index focused on the body contacting area in order to restrain the robot's falling.
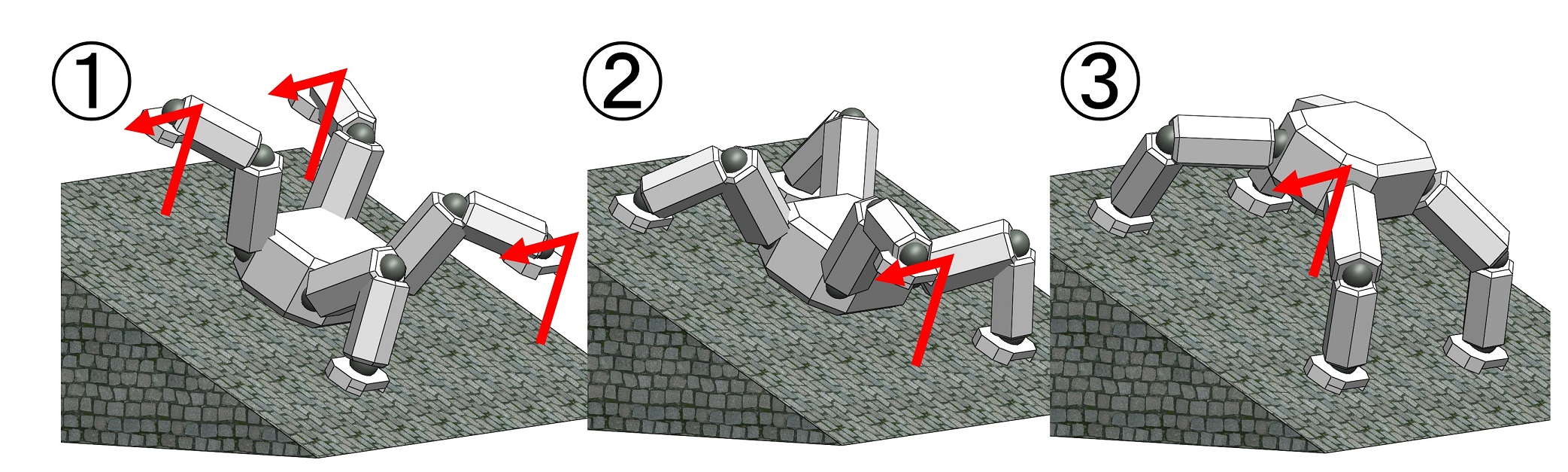 Crawling motion by proposed gait generation method
Crawling motion by proposed gait generation method
・Takashi Matsuzawa, Kenji Hashimoto, Xiao Sun, Tomotaka Teramachi, Shunsuke Kimura, Nobuaki Sakai, Yuki Yoshida, Aasaki Imai, Kengo Kumagai, Takanobu Matsubara, Koki Yamaguchi, Wei Xin Tan and Atsuo Takanishi, "Crawling Gait Generation Method for Four-limbed Robot Based on Normalized Energy Stability Margin", Proceedings of The 15th IEEE International Symposium on Safety, Security, and Rescue Robotics 2017 (SSRR 2017), pp. 223-229, Shanghai, China, October, 2017.
■ Control system design for crawling speedup of limb robot
It took 4.5 seconds to crawl in one cycle. Our robot has the ability to move more quickly (< 4.5[s/cycle]), but each joint isn't tracking well. To solve this problem, the design of a control system to improve the speed was proposed. The position commands of joints are made continuous, the delay of the command for each leg is reduced and changing the reference value for unit conversion. As a result, robot was able to crawl consistently in speed of 4.0[s/crawl] by proposed method.
[Research paper (in Japanese)]
・近藤貴久,松澤貴司,孫瀟,内藤博,名村圭祐,佐藤丈弘,寺江航汰,村上将嗣,吉田駿也,伊藤明,高西淳夫,橋本健二,“極限環境下での作業可能な災害対応ロボットの開発(第36報: 4肢ロボットの腹ばい移動高速化のための制御系設計)“,第38回日本ロボット学会学術講演会予稿集,3F2-03,オンライン,2020年10月.
Climbing a vertical ladder
■ Climbing a ladder with 2-point contact
It took 120 seconds to climb up/down a rung with 3-point contact ladder climbing for our robot. Now the robot is capable of climbing/down a rung for only 10 seconds, with 2-point contact.
■ Planning and control of stable ladder climbing with 2-point contact
We proposed the basis of stability judging considering the multi-mass model (total number of mass: 29) for ladder climbing and inertial forces. This method allows the robot to reduce gravitational moments applied to whole body of the robot in need, furthermore appropriate distribution of reaction force on hand and foot restrain the slip on the ladder.
[Research Paper]
・Xiao Sun, Kenji Hashimoto, Tomotaka Teramachi, Takashi Matsuzawa, Shunsuke Kimura, Nobuaki Sakai, Syota Hayashi, Yuki Yoshida and Atsuo Takanishi, “Planning and Control of Stable Ladder Climbing Motion for the Four-limbed Robot ‘WAREC-1’,” Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017), pp. 6547–6554, Vancouver, Canada, September, 2017.
■ Path-time independent trajectory planning of ladder climbing
We used linear interpolation as the former method of trajectory generation, thus there was huge velocity change at the mid-point, and it causes high peak value of current for motors in the robot. Now we realized path-time independent trajectory planning of ladder climbing in this research. In this way, trajectories of end- effectors with smooth path and continuous velocity can be realized and burden of the motors can be released.
[Research Paper]
・Xiao Sun, Kenji Hashimoto, Shinya Hamamoto, Ayanori Koizumi, Takashi Matsuzawa, Tomotaka Teramachi and Atsuo Takanishi, “Trajectory Generation for Ladder Climbing Motion with Separated Path and Time Planning,” Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2016), pp. 5782–5788, Daejeon, Korea, October, 2016.
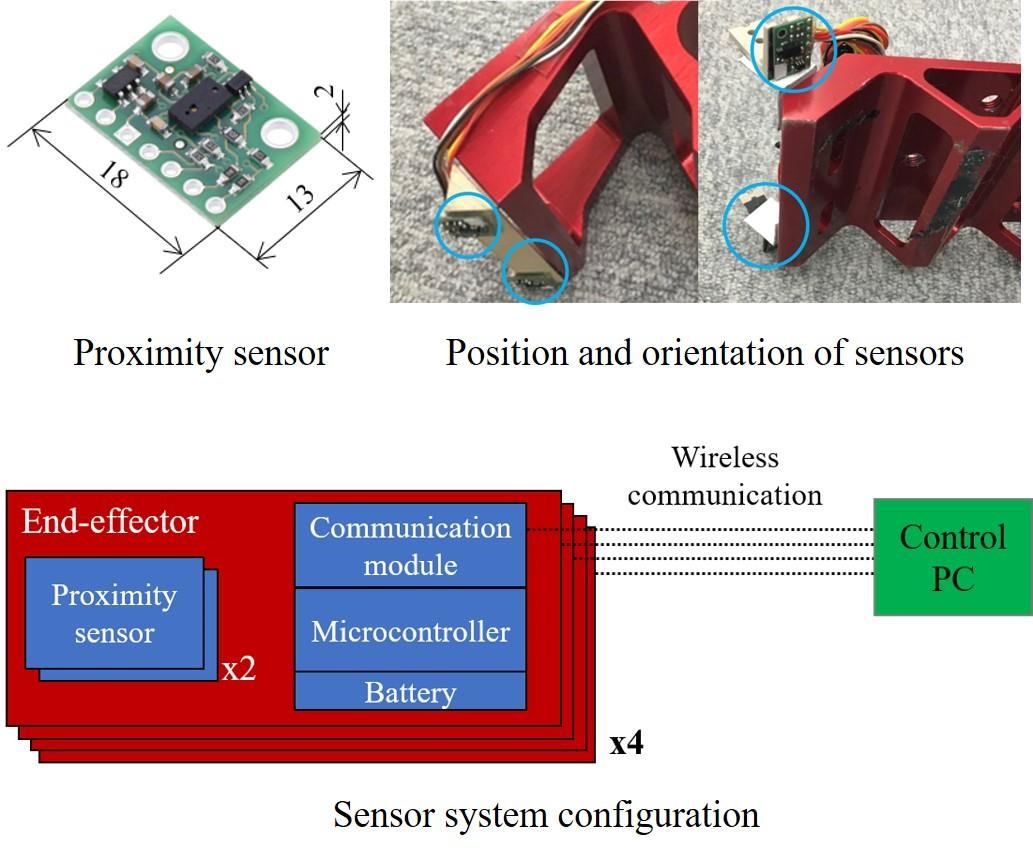
■ Rung recognition and error compensation by super-small proximity sensors in ladder climbing
For the former ladder climbing of our robot, there was error caused by the deformation of robot and ladder, which may result in failure of successful grab of ladder rung and even the ladder climbing itself. As its solution, super-small proximity sensors were equipped at each end-effector of the robot, enabling measurement and calculation of relative position and orientation between the end-effectors and ladder rungs. With the sensor system (depicted in the figure below) established, stability of ladder climbing is now greatly improved by rung recognition and error compensation.
[Research paper]
・Xiao Sun, Shota Hayashi, Kenji Hashimoto, Takashi Matsuzawa, Yuki Yoshida, Nobuaki Sakai, Asaki Imai, Masahiro Okawara, Kengo Kumagai, Takanobu Matsubara, Koki Yamaguchi and Atsuo Takanishi, “Error Compensation System with Proximity Sensors for Vertical Ladder Climbing of the Robot "WAREC-1"”, IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), pp.40-46, 2018.
Bipedal walking
Our robot can perform bipedal walking as one of alternative locomotion styles. The step length is 100[mm] and walking cycle is 30[s/step].
Manipulation
■ Lifting up a barbell
Four limbs of the robot have common structures. Therefore, arms are as powerful as legs. Our robot can lift up 120[kg] barbell, which is heavier than the robot itself(110[kg]).
■ Grasping Rotary Hammer
It is capable for the four-limbed robot to grasp the biggest level of commercially available rotary hammer (Mass: 15.6[kg]), equipped with the high-power robot hand developed by Kawasaki & Mouri Lab. in Gifu Univ. and Namiki Precision Jewel Co.,Ltd.
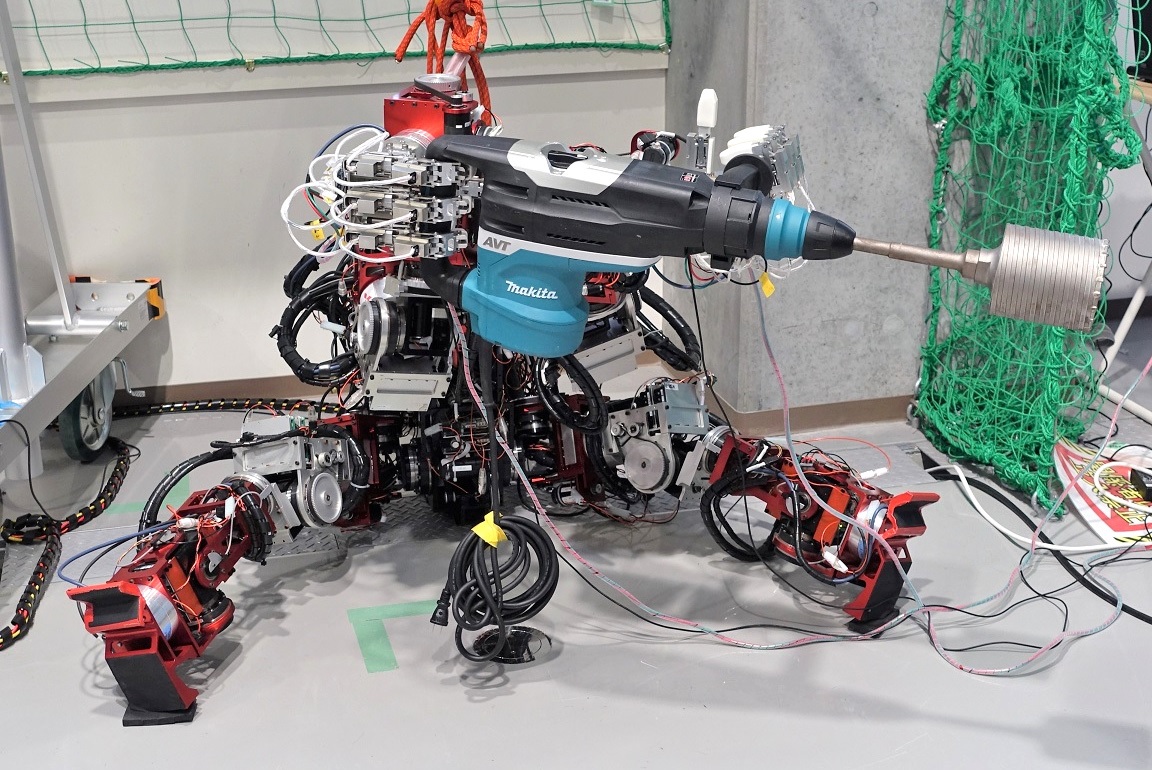
Grasping Rotary Hammer