極限環境の分類
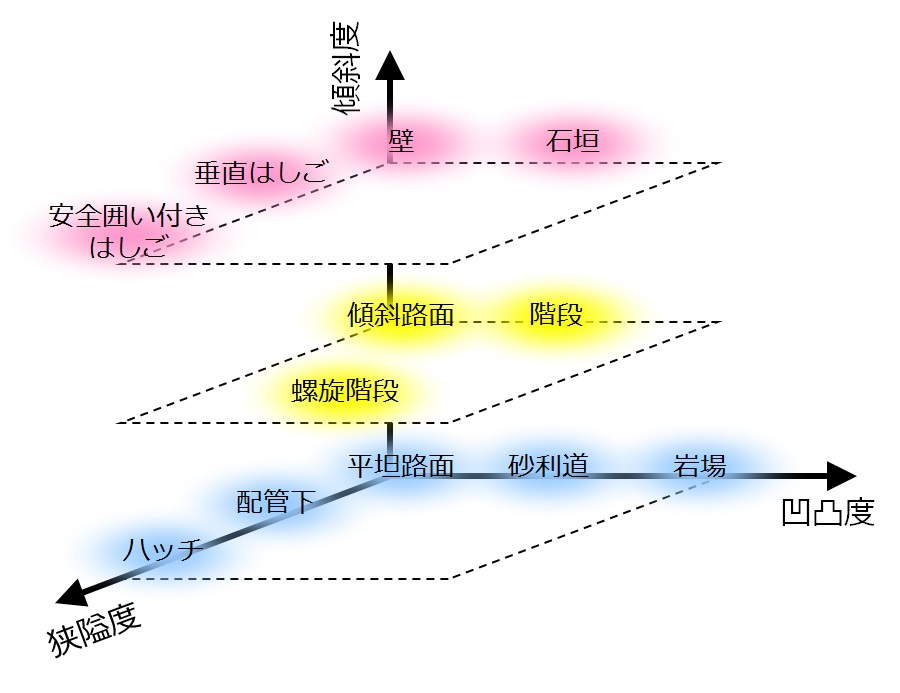
極限環境は形状に着目すると「凹凸度」,「狭隘度」,「傾斜度」の3つの指標に分類できると考えられます.この中から「凹凸度」が高く2足歩行などの移動様式では踏破が困難である瓦礫などの不整地,「傾斜度」が最も高く脚ロボットでは踏破が困難である垂直はしごに着目しました.
極限環境の分類
[関連論文]
・Kenji Hashimoto, Takashi Matsuzawa,Tomotaka Teramachi, Kazuhito Uryu, Xiao Sun, Shinya Hamamoto, Ayanori Koizumi and Atsuo Takanishi, “A Four-Limbed Disaster-Response Robot Having High Mobility Capabilities in Extreme Environments,” Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017), pp. 5398–5405, Vancouver, Canada, September, 2017.
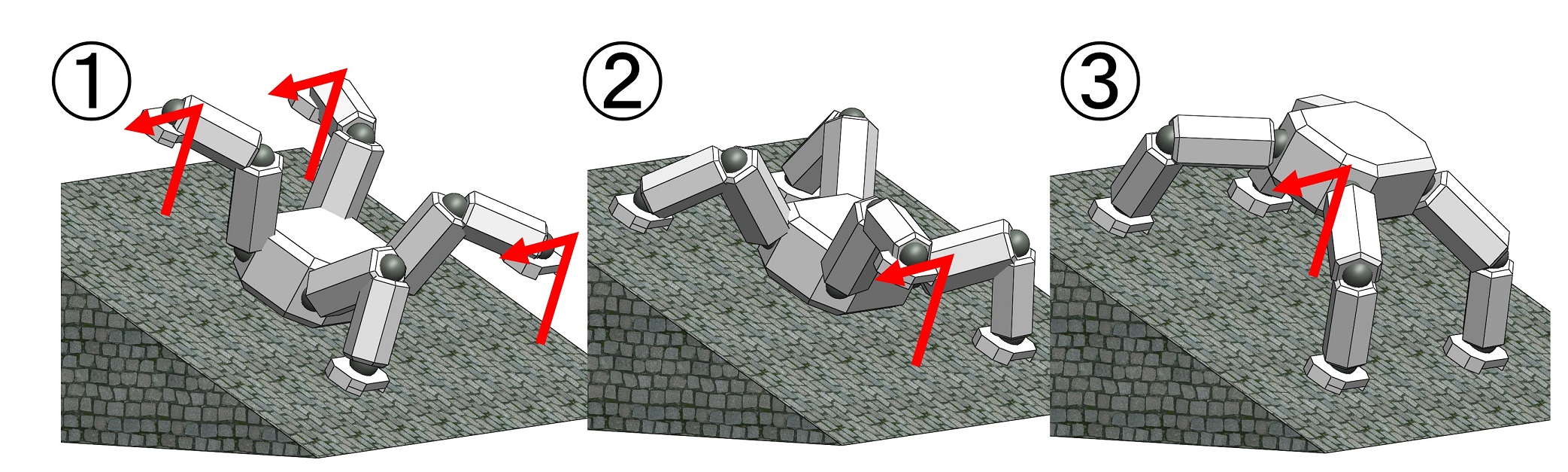
腹ばい移動
■ 腹ばい移動の提案
災害現場のようながれきが山積し崩壊する可能性がある環境ではロボットが転倒し故障する危険性があります.このようなリスクを低減するために,従来の2足歩行・4足歩行よりもさらに低重心で移動可能な腹ばい動作を提案しました.シミュレーションで不整路面のモデルを作成して4脚ロボットに腹ばい動作を適用し,不整路面において移動可能であることを確認しました.
腹ばい移動の歩容
[関連論文]
・橋本健二,小泉文紀,松澤貴司,孫瀟,濱元伸也,寺町知峰,酒井伸明,木村駿介,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第4報:4肢ロボットの匍匐移動法の提案),”日本機械学会ロボティクス・メカトロニクス講演会2016(ROBOMECH2016),1A2-09b7,神奈川県,2016年6月.
■ 腹ばい移動の進行方向制御・足先軌道修正制御
不整路面での腹ばい移動時の路面の崩壊によりロボットの進行方向が意図せず変化し,目標方向に対する進行方向のずれが発生します.そこで,左右の脚の繰り出し量を調整し,目標方向と進行方向のずれを低減する制御を開発しました.
また,機体が傾いているとロボットの足先と路面が意図しない衝突を起こし,腹ばい移動が妨げられる恐れがあります.そこで,ロボットに搭載したセンサ情報をもとに足先の軌道を変更する制御を開発しました.
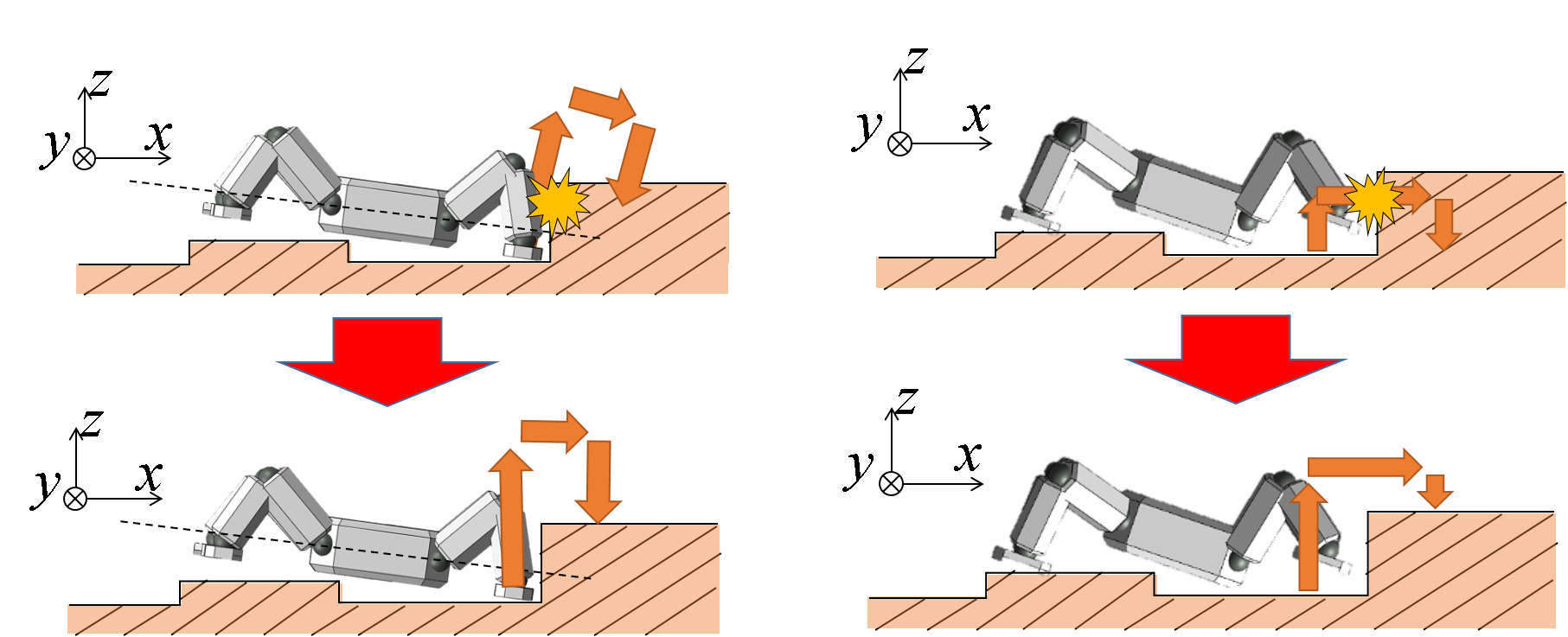
足先軌道修正制御
[関連論文]
・松澤貴司,小泉文紀,橋本健二,孫瀟,濱元伸也,寺町知峰,木村駿介,酒井伸明,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第5報:4肢ロボットの匍匐移動における進行方向制御),”日本機械学会ロボティクス・メカトロニクス講演会2016(ROBOMECH2016),1A1-09b3,神奈川県,2016年6月.
・松澤貴司,小泉文紀,橋本健二,孫瀟,濱元伸也,寺町知峰,酒井伸明,木村駿介,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第9報:4肢ロボットの匍匐移動時の足先軌道修正制御),”第34回日本ロボット学会学術講演会予稿集,2C1-07,山形県,2016年9月.
■ 過去画像履歴を用いた遠隔操作システムによる腹ばい移動
ロボットの運用時には,外界環境との接触やロボットの故障が想定されるため,外界に加えてロボットの状態も把握可能であることが望ましいです.そこで本研究では,京都大学松野研究室と名古屋工業大学森田・佐藤研究室が開発した過去画像履歴を用いた遠隔操作システムと産業技術総合研究所の佐々木洋子先生が開発した自己位置推定の技術を4肢ロボットWAREC-1に統合しました.評価実験により,腹ばい移動におけるロボットの俯瞰視点からの画像の生成および遠隔操作を実現しました.
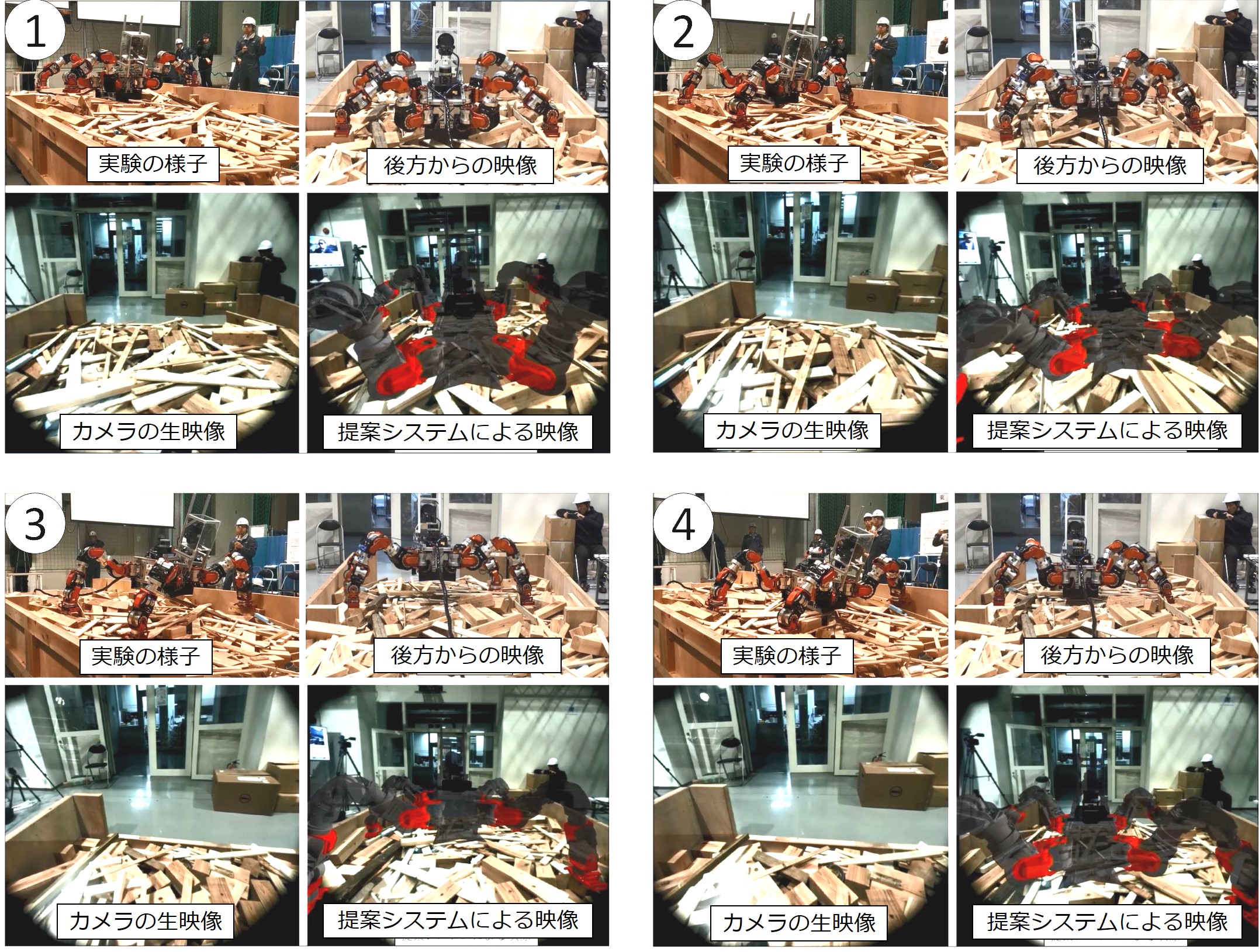 腹ばい移動におけるロボットの俯瞰視点からの画像
腹ばい移動におけるロボットの俯瞰視点からの画像
[関連論文]
・松澤貴司,橋本健二,熊谷健吾,澤井泰彦,佐藤徳孝,小西保影,松野文俊,長谷川龍生,佐々木洋子,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第13報:過去画像履歴を用いた遠隔操作システムによる4肢ロボットの腹ばい移動),”日本機械学会ロボティクス・メカトロニクス講演会2017(ROBOMECH2017),1P1-P05,福島県,2017年5月.
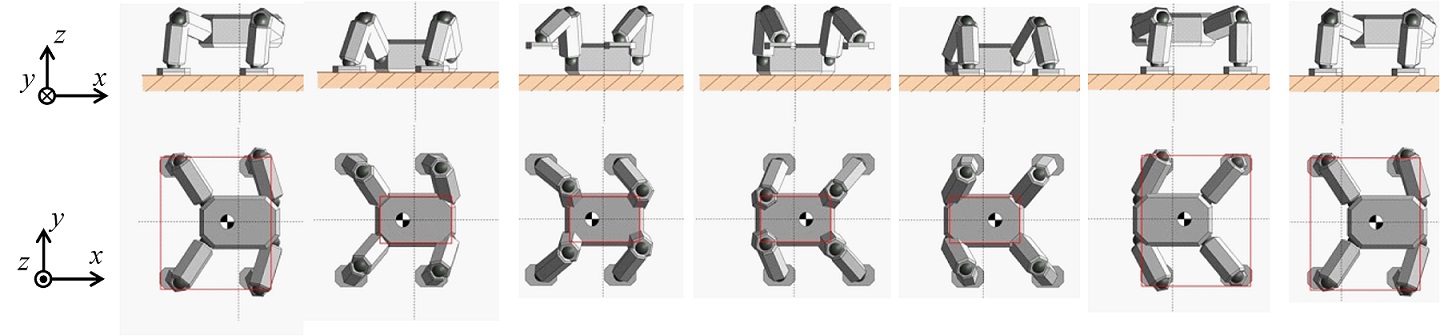
■ 安定指標に基づく4肢ロボットの腹ばい運動生成法
脚型ロボットの胴体と脚を交互に接地させて前進する腹ばい運動において,胴体接地時の接地面は脚接地時よりも小さくなるためロボットが胴体まわりに転倒しやすく,遊脚中の足先と地面が衝突して腹ばい移動が妨げられる場合があります.提案手法では胴体接地面における安定指標に基づき,胴体まわりの転倒を防ぐように脚の運動パターンを決定します.
 提案した運動生成法による腹ばい移動の歩容
提案した運動生成法による腹ばい移動の歩容
[関連論文]
・Takashi Matsuzawa, Kenji Hashimoto, Xiao Sun, Tomotaka Teramachi, Shunsuke Kimura, Nobuaki Sakai, Yuki Yoshida, Aasaki Imai, Kengo Kumagai, Takanobu Matsubara, Koki Yamaguchi, Wei Xin Tan and Atsuo Takanishi, "Crawling Gait Generation Method for Four-limbed Robot Based on Normalized Energy Stability Margin", Proceedings of The 15th IEEE International Symposium on Safety, Security, and Rescue Robotics 2017 (SSRR 2017), pp. 223-229, Shanghai, China, October, 2017.
■ 4肢ロボットの腹ばい移動高速化のための制御系設計
腹ばい移動において,従来手法では1サイクルあたり4.5[s]の腹ばい移動を達成しました.関節の角速度などハードウェアの性能的には余裕がありましたが,それ以上の速度で腹ばい移動を行うと関節の追従性が下がってしまい、腹ばい移動が不安定になるという問題がありました.そこで,位置指令波形の連続化,各脚の指令の遅延低減,単位変換の際の参照値の変更を行うことで従来困難であった1サイクル4.0[s]の腹ばい移動を連続で行うことを実現しました。
[関連論文]
・近藤貴久,松澤貴司,孫瀟,内藤博,名村圭祐,佐藤丈弘,寺江航汰,村上将嗣,吉田駿也,伊藤明,高西淳夫,橋本健二,“極限環境下での作業可能な災害対応ロボットの開発(第36報: 4肢ロボットの腹ばい移動高速化のための制御系設計)“,第38回日本ロボット学会学術講演会予稿集,3F2-03,オンライン,2020年10月.
垂直はしご昇降
■ 2点支持での安定かつ高速なはしご昇降
はしご上での安定判別規範を確立することでより高速に昇降できる2点支持によるはしご昇降を実現しました.また1桟あたり10秒での昇降が可能となりました.
従来の3点支持によるはしご昇降では1桟あたり120秒かかっていたため12倍で昇降することを実現することができました.
■ 2点支持での安定かつ高速なはしご昇降動作生成
はしご上での多質点(計29個)ロボットモデルと慣性項を考慮した安定判別条件を構築することにより,ロボットの安定状態を判断します.必要であれば胴体の水平移動でロボット全体が受ける重力モーメントを安定するために必要な分まで減らし,さらにはしご昇降中のロボットの手と足がはしごから受ける反力の分配バランスを保つことで反力の偏りによるはしご上の横滑りを抑止します.
[関連論文]
・Xiao Sun, Kenji Hashimoto, Tomotaka Teramachi, Takashi Matsuzawa, Shunsuke Kimura, Nobuaki Sakai, Syota Hayashi, Yuki Yoshida and Atsuo Takanishi, “Planning and Control of Stable Ladder Climbing Motion for the Four-limbed Robot ‘WAREC-1’,” Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017), pp. 6547–6554, Vancouver, Canada, September, 2017.
■ 経路・時間の独立計画が可能なエンドエフェクタ軌道
従来のはしご昇降時のエンドエフェクタ軌道は直線的な軌道であり,エンドエフェクタ軌道の方向転換時に各関節に大きな負荷がかかっておりました.そこで,エンドエフェクタの経路と時間計画を分離しそれぞれ独立で計画することで速度・軌道を連続かつ滑らかにして関節にかかる負担を減らすことを実現しました.
[関連論文]
・Xiao Sun, Kenji Hashimoto, Shinya Hamamoto, Ayanori Koizumi, Takashi Matsuzawa, Tomotaka Teramachi and Atsuo Takanishi, “Trajectory Generation for Ladder Climbing Motion with Separated Path and Time Planning,” Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2016), pp. 5782–5788, Daejeon, Korea, October, 2016.
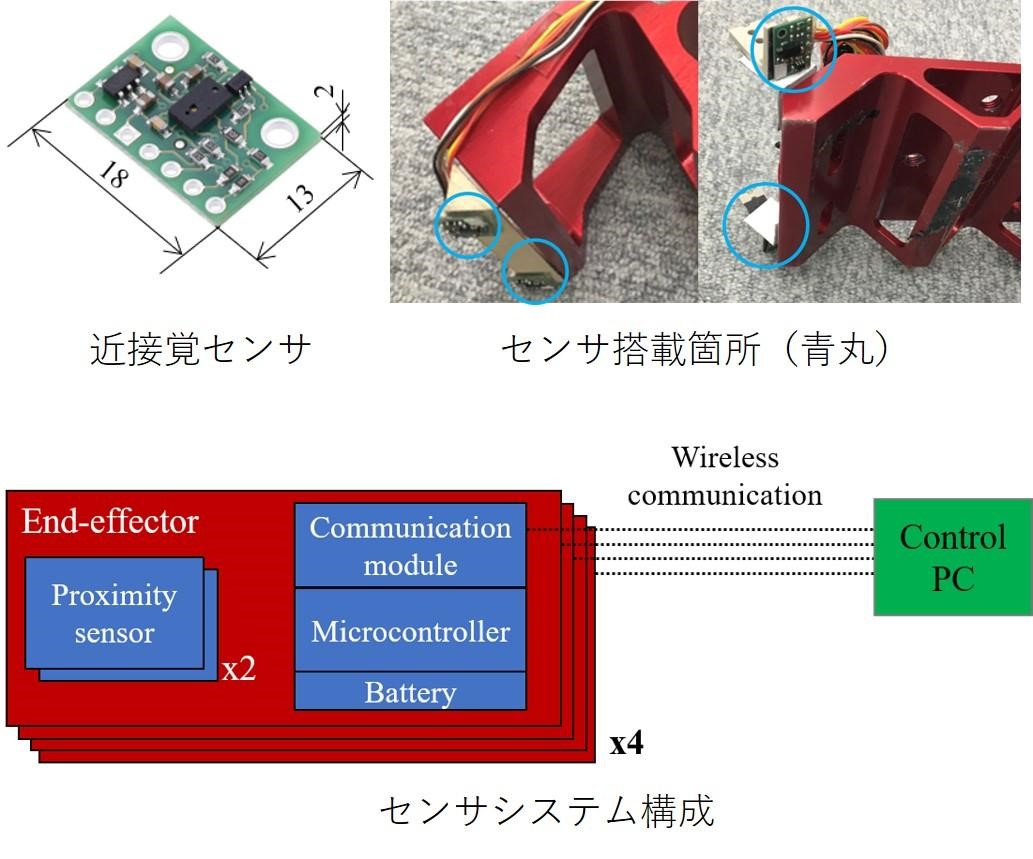
■ 超小型近接覚センサを用いたはしご昇降中の桟認識と誤差補償
今までのはしご昇降はロボット自身やはしごの変形などにより生じる誤差でエンドエフェクタが正しくはしご桟に引っかからず,はしご昇降が失敗するケースがありました.そこで下記図のようにロボットの各エンドエフェクタに超小型近接覚センサを装着し,センサシステムを構築しました.はしご昇降中にセンサシステムでエンドエフェクタとはしご桟の相対距離・姿勢を計測・計算し,誤差を補償可能な安定したはしご昇降を実現しました.
[関連論文]
・Xiao Sun, Shota Hayashi, Kenji Hashimoto, Takashi Matsuzawa, Yuki Yoshida, Nobuaki Sakai, Asaki Imai, Masahiro Okawara, Kengo Kumagai, Takanobu Matsubara, Koki Yamaguchi and Atsuo Takanishi, “Error Compensation System with Proximity Sensors for Vertical Ladder Climbing of the Robot "WAREC-1"”, IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), pp.40-46, 2018.
2足歩行
多様なロコモーションの一つとして2足歩行の実験を行い,歩幅100[mm],歩行周期30[s]での歩行を実現しました.
力強い作業と精密な作業
■ 重量挙げ
このロボットは4肢が共通構造となっているため,腕も脚と同様に強い力を発揮することができます.この実験では,ロボットの自重以上の負荷である120[kg]のおもりを持ち上げる動作を実現しました.
■ ハンマドリルの把持
岐阜大学川﨑・毛利研究室と並木精密宝石株式会社らが開発した高出力ハンドをプロトタイプ機に取り付け,市販されている中で最大級のハンマドリル(重量15.6[kgf])を把持することに成功しました.
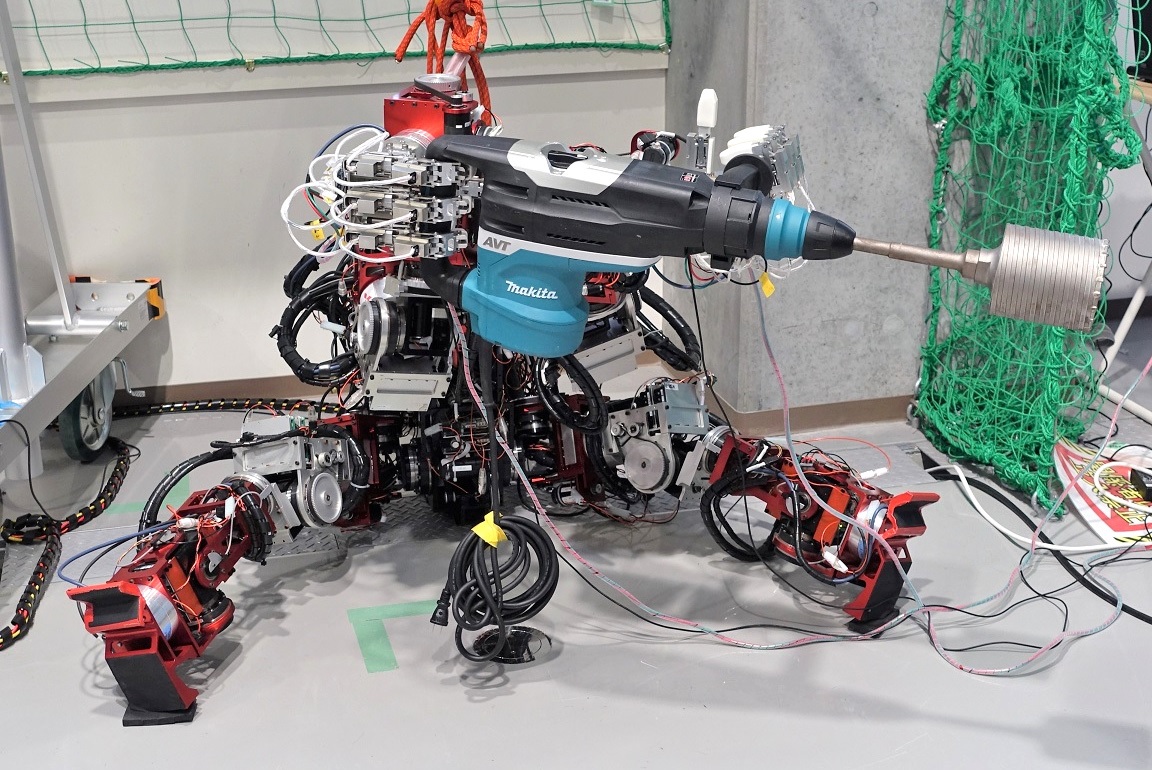
ハンマドリル把持の様子
[関連論文]
・橋本健二,今井朝輝,木村駿介,寺町知峰,松澤貴司,毛利哲也,中村一也,川﨑晴久,高西淳夫,“極限環境下で作業可能な災害対応ロボットの開発(第12報:高出力ハンドの4肢ロボットへの統合と電動工具保持),”日本機械学会ロボティクス・メカトロニクス講演会2017(ROBOMECH2017),1P1-P03,福島県,2017年5月.