小型倒立振子ロボット

小型倒立振子ロボット
|
1. 開発目的 これまでに開発してきたWV-1,WV-2RIIの技術を応用し,廉価盤のマイコン,小型の模型用モータを用いて倒立振子ロボットの小型版を製作しました.マイコンには,学研大人の科学付録のJapaninoを使用しました.また,モータには1相エンコーダが内蔵されているマブチモータ㈱のFC140SUを使用しました.ギヤボックスを省略するため,車輪のゴムとモータシャフトの摩擦駆動を利用しています.これらにより,手軽に実験ができる小型の2輪型倒立振子を実現しました. |
|
2.仕様
|
||||||||||||||||||||||
|
3.倒立振子とは? 倒立振子(とうりつしんし)とは,その名の示すように,普通の振り子(下向き)を逆立ち(倒立)させたものになります.倒立振子の制御の方法は,「手のひらの上で棒をたてる」というイメージで,倒れないようにするためには常に手を動かしてなければなません.倒立振子の制御は手のひらの代わりに台車をうまく動かして,倒立振子が倒れないようにしています. 倒立振子のイメージは下図のようになっており,①~⑦をずっと繰り返しながら倒れずに立つことができるようになっています. 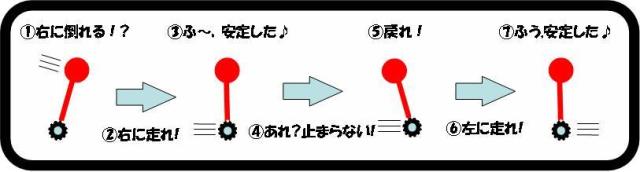 |
| 4. ムービー |
| 下の画像をクリックすると実験の様子が見れます. |
 |
 |
| 長時間安定倒立 MPEG 8.1 MB |
外乱あり MPEG 4.1 MB |
| 5. 謝辞 |
| 本研究は,早稲田大学ヒューマノイド研究所および株式会社学研教育出版の協力のもとで実施しています.ここに感謝の意を表します.また、(株)学研教育出版から発売されている大人の科学VOL.27付録8bitマイコンJapaninoを使用した本機は、本研究を進める過程で3D-CADソフトウェア"SolidWorks" を用いて設計しました。また,本機にはマブチモータ(株)より提供頂きました一相エンコーダ付きの小型モータFC140SUを使用しました。ここに感謝致します。 |
| 関連ホームページ 早稲田大学ヒューマノイド研究所 ソリッドワークス・ジャパン株式会社 株式会社学研教育出版 マブチモータ株式会社 
|
