Waseda Wheeled Vehicle - No.1
(WV-1)

Waseda Wheeled Vehicle - No.1
(WV-1)
|
1. Concept In the recent years, in order to foster the creativity of undergraduate students of engineering fields, the acquisition of technical skills requires an interdisciplinary approach to understand the basic knowledge among different backgrounds such as: advanced programming, peripherals devices control, dynamic system control, real-time control, simulation analysis, etc. As an approach to cover different aspects of the Robot Technology, in this project, we focused in developing an education tool designed to introduce at different educational levels the principle of developing mechatronic systems. In particular, the development of an inverted pendulum mobile robot has been proposed. |
|
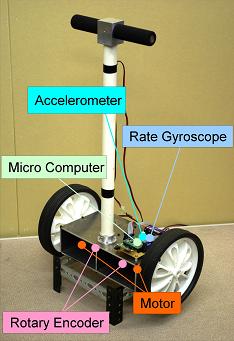
2. Specification
| ||||||||||||||||||||||
|
3. What is the Inverse Pendulum?
A Normal Pendulum is a rod with a weight at the end, and the weight moves under the joint. The Inverse Pendulum is reversed one, the weight moves over the joint. It looks like a pen stands on your hand. To make it balance, you must move your hand carefully and quickly. This machine has two wheel instead of your hand. The control process is below. 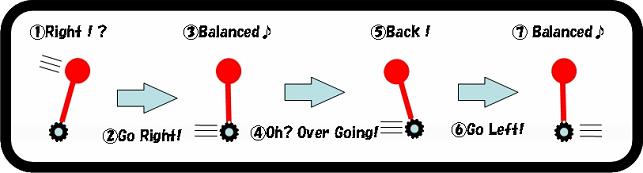 |
| 4. Videos |
| Click every photo to show video. |
 |
 |
 |
| Running "8" MPEG 3.2 MB |
Going up & down slope MPEG 4.3 MB |
Disturbance Force MPEG 1.8 MB |
| 5. Event(2008/11/20-21 @TNC Broadcast Building, Fukuoka Pref.) |
| We have done the trial to check the performance in the real environment of WV-1 at TNC Broadcast Building in Fukuoka Pref. |
 |
 |
| Escalator MPEG 2.0 MB |
Slope MPEG 4.5 MB |
| Acknowledgements This research is supported by a Grant-in-Aid from the Robotics Industry Development Council (RIDC), and it is being conducted at Humanoid Robotics Institute (Waseda University) and JAPAN ROBOTECH LTD. In addition, we would like to mention that the WV-1 uses the ARM (STM32) produced by ST Microelectronics Ltd. The WV-1 has been designed by 3D CAD software "SolidWorks". Special thanks to SolidWorks Japan K.K. for the software contribution. |
| Links Humanoid Robotics Institute, Waseda University JAPAN ROBOTECH LTD. The Robotics Industry Development Council (RIDC) ST Microelectronics Ltd. SolidWorks Japan K.K. 

 |