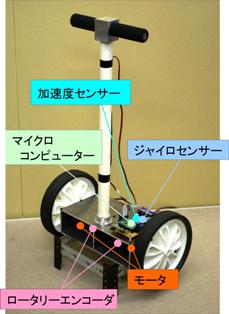
Waseda Wheeled Vehicle - No.1
(WV-1)

Waseda Wheeled Vehicle - No.1
(WV-1)
|
�P. �J���ړI ����P���p�̃��{�b�g���ނ̑����́A���{�b�g�����A���S���Y����A�������AC����v���O���~���O����Ȃǂ̓���җp�������A ���x�ȃv���O���~���O�́A���Ӌ@��̐���́A���I�V�X�e���̐���A���A���^�C���Ȑ���A�V�~�����[�V�������͂Ȃǂ̕����̊w�╪��� �܂�����w�ۓI�Ȋ�b�m���ƌ����I�ȉ������@�����߂̃X�L�����K������悤��RT���p�Z�p�̊�b������H���p���J�o�[���鋳��P���p�̃��{�b�g���ނ����݂Ȃ��B�@ �]���C�|���U�q�͐��䗝�_�̗L�����̌��؋y�ѐ���H�w�̎����I�ȍD��Ƃ��ĕ��L���p�����Ă���C �w�K�e�[�}�Ƃ��Ĕ��ɖ��͂�����̂ł���D�{�v���W�F�N�g�͂��̂悤�ȓ|���U�q�����ނƂ��ĕ��L���N��̑� �l�Ȋw�K�p�r�ɑΉ��ł���悤�����J�����s���Ă���D |
|
�Q.�d�l
| ||||||||||||||||||||||
|
�R.�|���U�q�Ƃ́H
�|���U�q�i�Ƃ�����j�Ƃ́C���̖��̎����悤�ɁC���ʂ̐U��q�i�������j���t�����i�|���j���������̂ɂȂ�܂��D �|���U�q�̐���̕��@�́C�u��̂Ђ�̏�Ŗ_�����Ă�v�Ƃ����C���[�W�ŁC�|��Ȃ��悤�ɂ��邽�߂ɂ͏�Ɏ�����ĂȂ���Ȃ܂���D �|���U�q�̐���͎�̂Ђ�̑���ɑ�Ԃ����܂��������āC�|���U�q���|��Ȃ��悤�ɂ��Ă��܂��D �|���U�q�̃C���[�W�͉��}�̂悤�ɂȂ��Ă���C�@�`�F�������ƌJ��Ԃ��Ȃ���|�ꂸ�ɗ����Ƃ��ł���悤�ɂȂ��Ă��܂��D 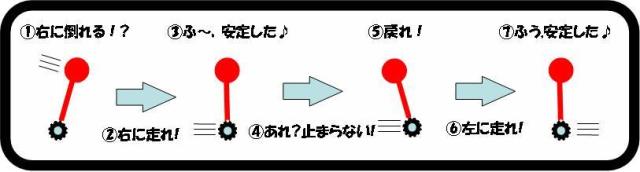 |
| �S. ���[�r�[ |
| ���̉摜���N���b�N����Ǝ����ɂčs�����ۂ̎����̗l�q������܂��D |
 |
 |
 |
| �W�̎����s MPEG 3.2 MB |
�⓹ MPEG 4.3 MB |
�O�� MPEG 1.8 MB |
| �T. �C�x���g�i2008�N11��20���`11��21�� �����������s TNC������فj |
| �@�������ɂ����鑖�s���\�������邽�߁CWV-1�̑��s�e�X�g��TNC������قɂčs���܂����D���̉摜���N���b�N����Ƃ��̍ۂ̎����̗l�q������܂��D |
 |
 |
| �G�X�J���[�^ MPEG 2.0 MB |
�⓹ MPEG 4.5 MB |
| �ӎ� �{�����́A���{�b�g�Y�ƐU����c�iRIDC�j�u����20�N�x���{�b�g�J���Z�p�͋������Ɓv�� �ϑ��ɂ��s���A����c��w�q���[�}�m�C�h����������ъ������JAPAN ROBOTECH�̂� �ƂŎ��{���Ă��܂��B�����Ɋ��ӂ̈ӂ�\���܂��B �܂��AST�}�C�N���G���N�g���j�N�X(��)���甭������Ă���ARM�iSTM32)���g�p�����{�@ WV-1�́A�{������i�߂�ߒ���3D-CAD�\�t�g�E�F�A"SolidWorks" ��p���Đv���܂� ���B�{�\�t�g�E�F�A����Ē����܂����\���b�h���[�N�X�E�W���p��������Ђɂ����� �v���܂��B |
| �֘A�z�[���y�[�W ����c��w�q���[�}�m�C�h������ �������JAPAN ROBOTECH ���{�b�g�Y�ƐU����c�iRIDC�j ST�}�C�N���G���N�g���j�N�X������� �\���b�h���[�N�X�E�W���p��������� 

 |