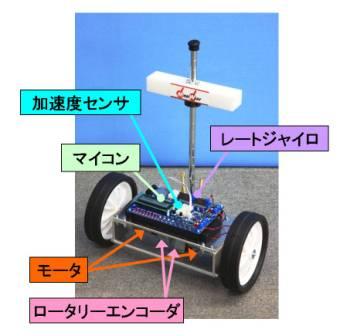
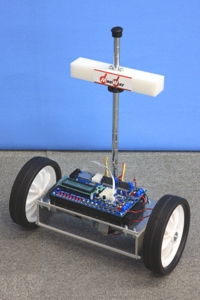
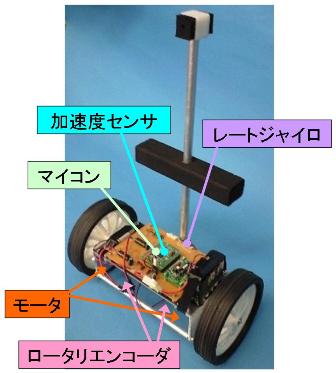
Waseda Wheeled Vehicle
- No.2 Refined II
(WV-2RII)
このロボットがプロトタイプになった教育用ロボットキットは株式会社JAPAN ROBOTECHから発売中です!
|
1.背景 国際教育到達度評価学会の調査(2003年 中学2年生対象)によれば,「強く理科の勉強に楽しさを感じている」学生は,国際平均44%に対して国内平均では19%と少なく,また,「高いレベルで理科の勉強に積極的である」学生は,国際平均57%に対して17%と特に差が顕著となっています.理科離れが指摘されてから久しいですが,将来,この国を担う優秀なエンジニアを育てるためには,まず,理科に対して強く興味を持たせることが重要であるといえます.そのために,学習者である学生の興味を引き出すことができ,なおかつ学習性の高い教材が必要とされています. 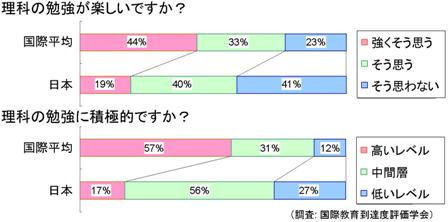 |
|
2. 開発目的 教育訓練用のロボット教材の多くは,ロボットを動かすアルゴリズムや,制御入門,C言語プログラミング入門などの入門者用が多く,高度なプログラミング力,周辺機器の制御,動的システムの制御,リアルタイムな制御,シミュレーション分析などの複数の学問分野にまたがる学際的な基礎知識と,現実的な解決方法を導くためのスキルを習得するような,RT応用技術の基礎から実践応用までをカバーする教育訓練用のロボット教材はありません. 従来,倒立振子は制御理論の有効性の検証及び制御工学の実験的な好例として幅広く用いられていて,学習テーマとして非常に魅力あるものといえます.本プロジェクトではこのような倒立振子を教材として,幅広い年代の多様な学習用途に対応できるよう,研究開発を行っています. 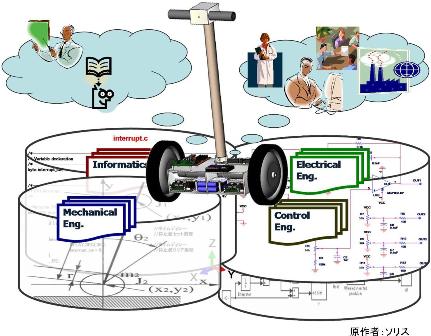 |
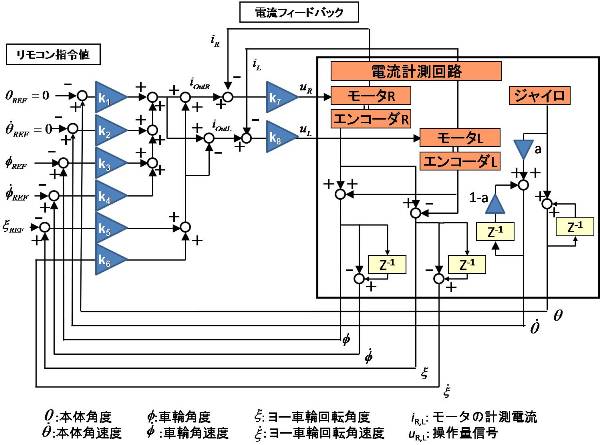
3.概要
|
|||||||||||||||||||||||||||||
| 4. アプリケーション |
| サッカー | |
|
|
 |
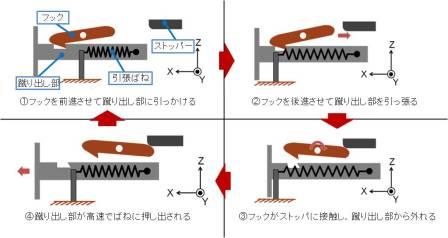 |
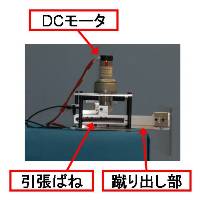
| 蹴り出し機構 | 蹴り出し動作 |
| WV-2RIIのサッカー用アプリケーションを開発しました.リモコンのボタンを押すと蹴り出し機構がばねにより高速で押し出され,ボールを蹴ることができます.このアプリケーションを搭載したWV-2RIIを使用してサッカー競技を行いました. |
| 蹴り出し機構 MPEG 5.2 MB |
サッカー競技 MPEG 5.7 MB |
| 相撲 | |
|
|
 |
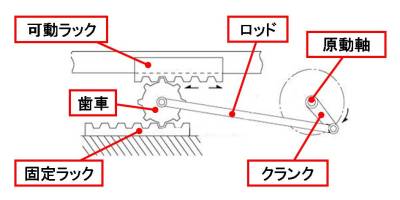 |
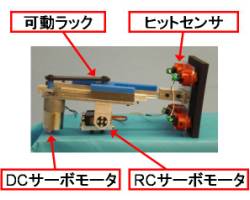
| 張り手アーム | アームを繰り出す機構 (参考:http://koza.misumi.jp/lca/2002/09/82_3.html) |
| WV-2RIIの相撲用アプリケーションを開発しました.リモコンのボタンを押すとアームが押し出され,張り手の動作を行います.相手に当たった場合はアーム先端に取り付けられたヒットセンサにより検出できます.また,アームのベース下部に搭載されたRCサーボモータにより,アームは常に水平に保たれます.このアプリケーションを搭載したWV-2RIIを使用して相撲競技を行いました. |
| 張り手アーム MPEG 4.9 MB |
相撲競技 MPEG 3.6 MB |
| WB-3を用いた人間とのインタラクション (WBクマダンス) | |
|
|
 |
 |
| アーム部 | 顔と心理モデル |
| 当研究室で開発した超小型モーションキャプチャデバイスWB-3を用いた遠隔制御を開発しました。ヒトとロボットとのインタラクション性を高めるため,ただ前進などの操作をするだけでなく,一緒に遊ぶという要素としてダンスを提案いたしました。また、顔を搭載し、心理モデルを組み込むことで表情の変化を再現致しました。 |
| アームモーション MPEG 64.2 MB |
表情導出 MPEG 2.9 MB |
| 二重倒立振子の振上げ動作 (剣道) | |
|
|
 |
 |
| 振子機構のモデル化 | 制御原理 |
| 二重倒立振子を開発することで竹刀機構を実現し、剣道の動作を実現いたしました。竹刀動作は第2振子の位置.速さから進行方向を決める振り上げ動作、そして安定姿勢からの角度差から補正値を算出し車輪の指令値とする倒立の安定動作という2つのフェーズから成り立っています。 |
| 二重倒立振子 MPEG 0.9 MB |
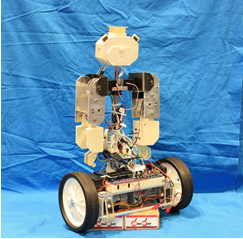
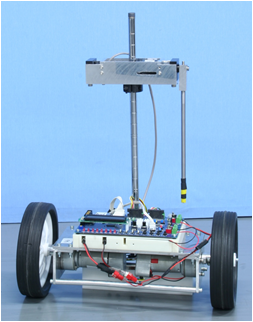
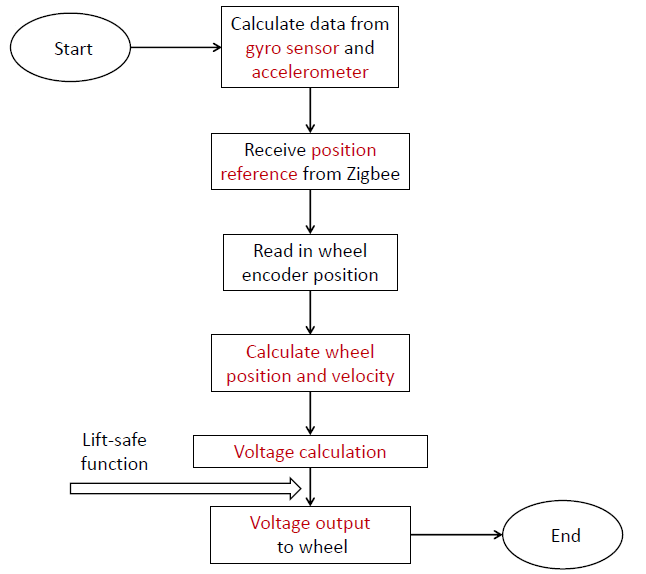
| インターン生によるアプリケーション作成 |
|
 |
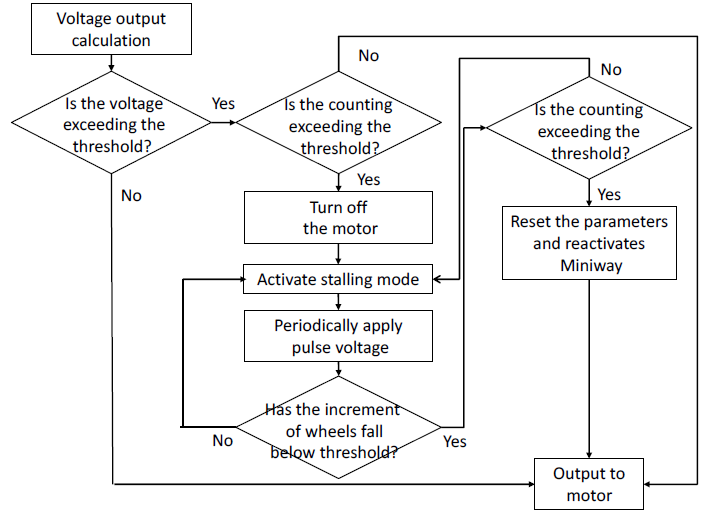 |
| Flow chart for Miniway main control loop | Flow chart for the lift-safe function |
|
 |
 |
| 概観 | 機構 |
| おもちゃロボット MPEG 8.33 MB |
|
| リモートコントロール1 MPEG 71.8 MB |
リモートコントロール2 MPEG 24.4 MB |
| 5. イベント |
| 倒立振子ロボットワークショップ (2010年2月25日〜2月26日 福岡県福岡市 TNC放送会館 ロボスクエア) |
WV-2RIIをプロトタイプとした教育用ロボットキットの発売に先立ち,ロボスクエアにおいて実機を使用してのワークショップを開催しました.大学生を対象としてプログラムの書き換えやフィードバックゲインの調整実習などを行いました.
|
| ロボティクス授業 Erasmus Mundus Master Program in Advanced Robotics (EMARO) (2009年11月2日〜11月12日 ワルシャワ工科大学 電力航空工学科) |
ワルシャワ工科大学の招待を受けて行ったロボティクス授業の中で,WV-2Rを用いたメカトロニクス実習を行いました.内容は,WV-2Rの組み立てとフィードバックゲインの調整です.
|
| メカトロニクス実習 (2009年2月26日〜2月28日 福岡県福岡市 TNC放送会館 ロボスクエア) | |
| WV-2Rの教材としての機能の確認のため,WV-2Rを用いたメカトロニクス実習をロボスクエアにて行いました.具体的には,高校生を対象としたロボットの組立実習,大学生を対象としたフィードバックゲインの調整実習などを行いました. | |
| メカトロニクス実習 MPEG 11 MB |
|
6.旧型機 | |
| WV-2R | |
|
 |
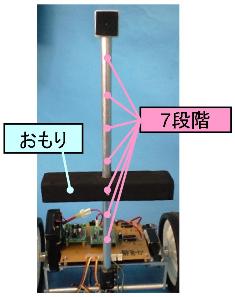 おもり位置の変更 |
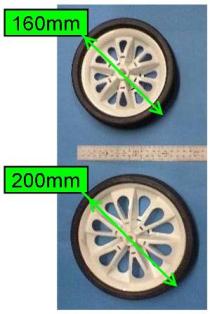 車輪径の変更 |
製作コストをWV-1から85%低減すると共に,学習性を高めるため,おもりの位置と車輪の径を変更可能としました.これにより,機構の変更に伴って機械的特性がどのように変化するのか,また,モデルの変更に対してどのように制御側で対応するのかを学習することができます. |
| WV-2Rを使ったアプリケーションとして,ライントレース,サッカー大会,webカメラによる指標追従を実践しました.また,制御パラメータの調整次第では転倒状態からの復帰が可能となっています. |
| ライントレース MPEG 5.2 MB |
サッカー大会 MPEG 4.7 MB |
| 指標追従 MPEG 6.5 MB |
転倒復帰 MPEG 1.0 MB |
| WV-2 | |
|

|
| 8の字走行 MPEG 8.7 MB |
外乱 MPEG 2.1 MB |
|
7.謝辞 本研究は,ロボット産業振興会議(RIDC)「平成20年度ロボット開発技術力強化事業」の委託により行われ,早稲田大学ヒューマノイド研究所および株式会社JAPAN ROBOTECHのもとで実施しています.ここに感謝の意を表します.また,STマイクロエレクトロニクス(株)から発売されているARM(STM32)を使用した本機WV-2Rは,本研究を進める過程で3D-CADソフトウェア"SolidWorks" を用いて設計しました.本ソフトウェアを提供して頂きましたソリッドワークス・ジャパン株式会社にも感謝致します. |
|
関連ホームページ 早稲田大学ヒューマノイド研究所 株式会社JAPAN ROBOTECH ロボット産業振興会議(RIDC) STマイクロエレクトロニクス株式会社 ソリッドワークス・ジャパン株式会社 


|