Waseda Wheeled Vehicle
- No.2 Refined II
(WV-2RII)
The educational robot kit whose WV-2RII is a prototype is now on sale from JAPANROBOTECH Ltd.!
|
1. Background According to the survey done on the 2nd grade students of junior high school in 2003 by The International Association for the Evaluation of Educational Achievement, the international average of the number of students who enjoy studying science is 44%, while in Japan it is only 19%. The international average of the number of students who have a strong positive attitude for studying science is 57%, while in Japan it is only 17%. The survey results clearly show that Japanese students don't have interest in science. In order to educate top level engineers, we must start from boosting the interest in science in students, before they enter university. For this purpose we need new educational tool which can arouse student's interest and provide high potential for studying. 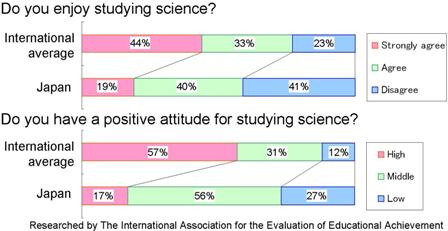 |
|
2. Concept In the recent years, in order to foster the creativity of undergraduate students of engineering fields, the acquisition of technical skills requires an interdisciplinary approach to understand the basic knowledge among different backgrounds such as: advanced programming, peripherals devices control, dynamic system control, real-time control, simulation analysis, etc. As an approach to cover different aspects of the Robot Technology, in this project, we focused in developing an education tool designed to introduce at different educational levels the principle of developing mechatronic systems. In particular, the development of an inverted pendulum mobile robot has been proposed. 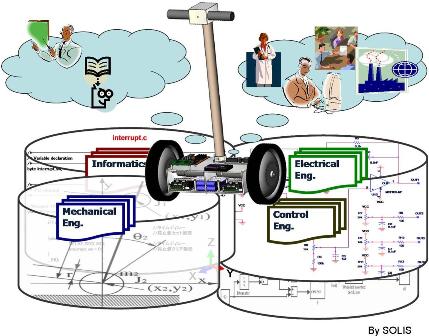 |
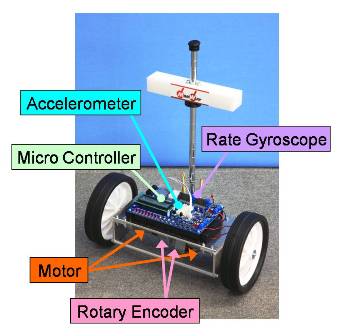
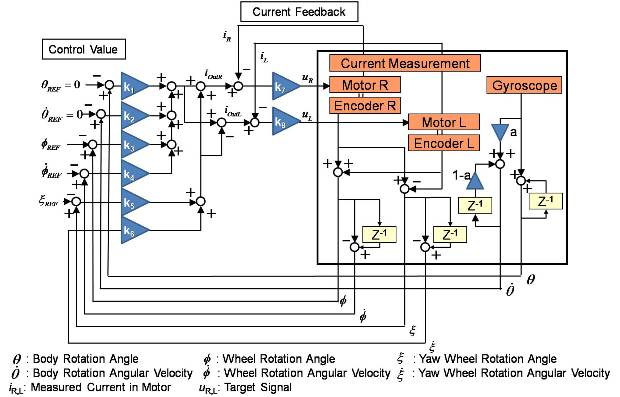
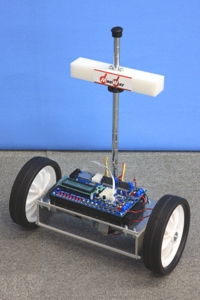
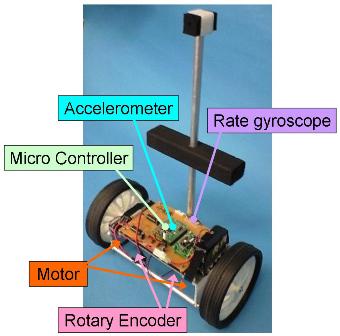
3. Specification
|
|||||||||||||||||||||||||||||
| 4. Applycations |
| Soccer | |
|
|
 |
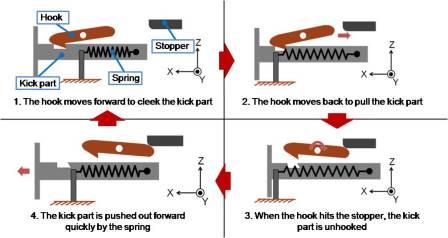 |
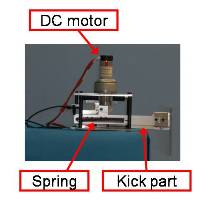
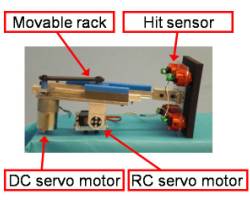
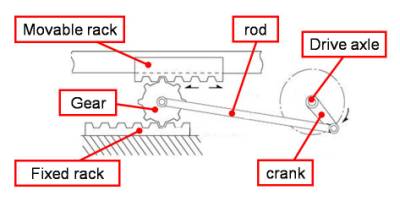
| Kick mechanism | Kick action |
|
We developed an applycarion for soccer for WV-2RII. A kick mechanism moves forward quickly and kicks a ball when an user pushs the remote control switch. We played soccer game by remote controling the WV-2RII with the applycation. |
| Kick mechanism MPEG 5.2 MB |
Soccer MPEG 5.7 MB |
| Sumo | |
|
|
 |
 |
| Slapping arm | Mechanism of arm's action (cf. http://koza.misumi.jp/lca/2002/09/82_3.html) |
|
We developed an applycarion for sumo for WV-2RII. A slapping arm moves into slapping action when an user pushs the remote control switch. It has a hit sensor which detects the hit to the opponent. The arm is keeped horizontal to the ground by RC Servo Motor. We played sumo game by remote controling the WV-2RII with the applycation. |
| Slapping arm MPEG 4.9 MB |
Sumo MPEG 3.6 MB |
| Human-robot interaction by using the motion capture device WB-3 | |
|
|
 |
 |
| DOF configuration | Psychological model |
| The aim of this mini-project is human-robot interaction. By using WB-3 which is a miniature motion capture device developed by our laboratory, remote control is implemented. By remote control, the user can dance with the robot as well as send basic commands (forward, back..). The robot is capable of the face expression in which psychological model is implemented. |
| Arm motion MPEG 64.2 MB |
Face expression MPEG 2.9 MB |
| Double inverted pendulum for Kendo | |
|
|
 |
 |
| Modeling of the robot | Principle of the control |
| In order to perform Kendo (Japanese martial art like Samurai), double inverted pendulum is implemented. Sword is second pendulum. The swing motion is controlled by the angle and angular velocity feed back of the second pendulum. |
| Double pendulum MPEG 0.9 MB |
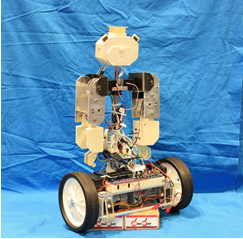
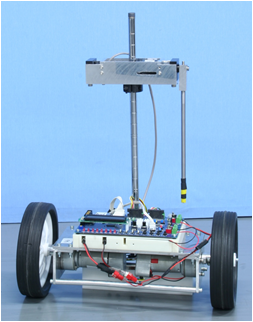
| Internship student project |
|
 |
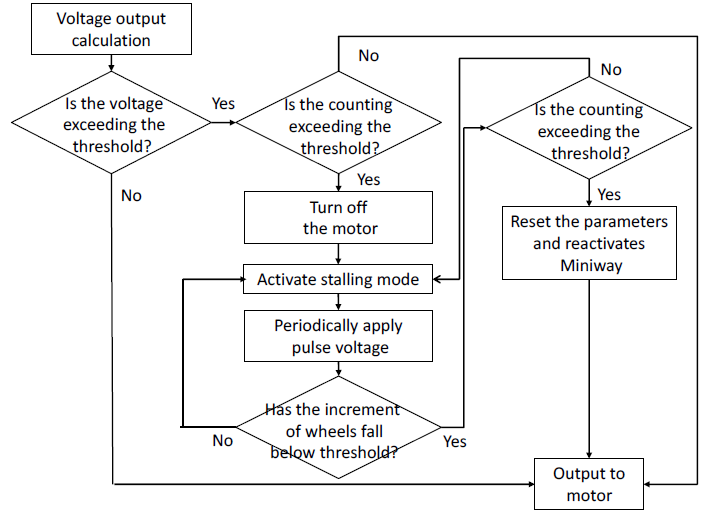 |
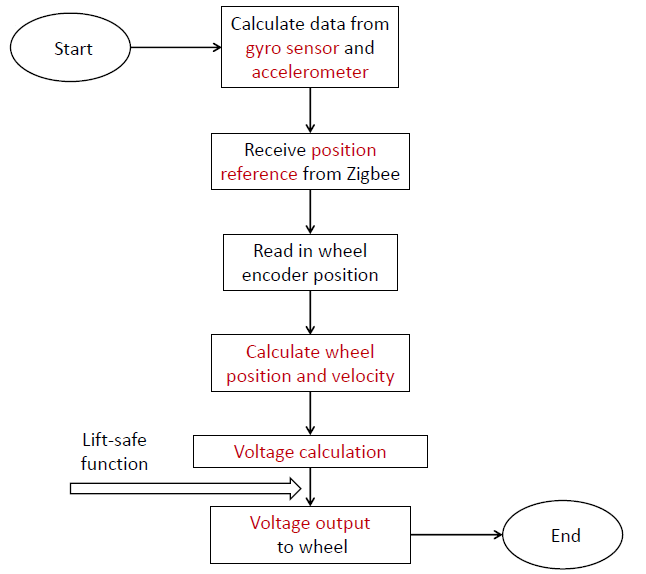
| Flow chart for Miniway main control loop | Flow chart for the lift-safe function |
|
 |
 |
| Overview | Mechanism |
| Toy doll Robot MPEG 8.33 MB |
|
| Remote control 1 MPEG 71.8 MB |
Remote control 22 MPEG 24.4 MB |
| 5. Events |
| Inverted Pendulum Robot Workshop (2010/02/26-28 @ROBOSQUARE, TNC Broadcast Building, Fukuoka Pref.) | |||
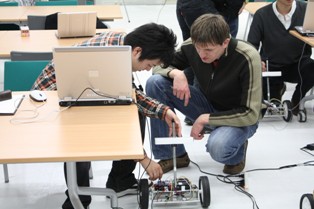
Before the release of the educational robot kit whose WV-2RII was a prototype, we organized a workshop by using the robots at ROBOSQUARE.
During the workshop, participants (mainly university undergraduate students) rewrote the program and performed feedback gain tuning.
|
|||
| The class of robotics "Erasmus Mundus Master Program in Advanced Robotics (EMARO)" (2009/11/02-12 @Faculty of Power and Aeronautical Engineering, Warsaw University of Technology) | |||
We were invited to Warsaw University of Technology to give a series of lectures on mechatronics.
Within the scope of the course, we performed a laboratory experiments, where university students were assembling the robot and tuning feedback gain parameters.
|
|||
| Mechatronics Laboratory (2009/02/26-28 @ROBOSQUARE, TNC Broadcast Building, Fukuoka Pref.) |
| In order to verify WV-2R's functionality as an educational tool, we organized mechatronics laboratory at ROBOSQUARE. During the laboratory exercises, junior high school students performed assembling practice and university undergraduate students performed feedback gain tuning. |
| Mechatronics laboratory MPEG 11 MB |
|
6. Older Models | |
| WV-2R | |
|
 |
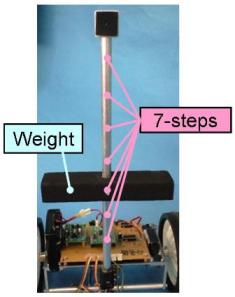 Adjustable height of weight |
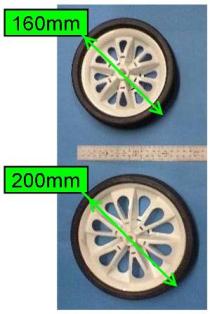 Two exchangeable sets of wheels |
In the new version of the robot, we reduced costs by 85%, made the height of weight adjustable and equipped it with exchangeable wheels. In the future the robot will serve as an educational tool for students. |
| We implemented in WV-2R such applications as line tracking, soccer and following object with use of web camera. Moreover, after proper tuning of the control parameters, WV-2R can rise up quickly from the fallen position. |
| Line Trace Function MPEG 5.2 MB |
Soccer MPEG 4.7 MB |
| Following Object MPEG 6.5 MB |
Rise-up Motion MPEG 1.0 MB |
| WV-2 | |
|

|
| Running "8" MPEG 8.7 MB |
Disturbance MPEG 2.1 MB |
|
7. Acknowledgement A part of this research was done at the Humanoid Robotics Institute (HRI), Waseda University. This research is supported by a Grant-in-Aid from the Robotics Industry Development Council (RIDC) which is being conducted at Humanoid Robotics Institute (Waseda University) and JAPAN ROBOTECH LTD. We also thank to ST Microelectronics Ltd. for the cooperation in this research. WV-2R has been designed by 3D CAD software "SolidWorks". Special thanks to SolidWorks Japan K.K. for the software contribution. |
|
Links Humanoid Robotics Institute, Waseda University JAPAN ROBOTECH LTD. The Robotics Industry Development Council (RIDC) ST Microelectronics Ltd. SolidWorks Japan K.K. 


|