Miniature inverted pendulum robot

Miniature inverted pendulum robot
|
1. Concept Miniature version of the inverted pendulum robot is developed by using WV-1, WV-2RII technology. Popular microcontroller Japanino which is published by Gakken is used. As actuator, small hobby type DC motor with 1 phase incremental encoder is used. Instead of using gear box, friction drive between motor shaft and rubber of the wheel is applied. This small inverted pendulum robot provides everywhere, everytime experiments. |
|
2. Specification
|
||||||||||||||||||||||
|
3. What is the Inverse Pendulum? A Normal Pendulum is a rod with a weight at the end, and the weight moves under the joint. The Inverse Pendulum is reversed one, the weight moves over the joint. It looks like a pen stands on your hand. To make it balance, you must move your hand carefully and quickly. This machine has two wheel instead of your hand. The control process is below. 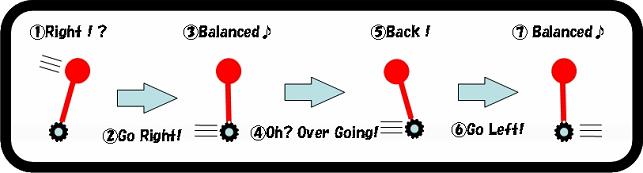 |
| 4. Videos |
| Click every photo to show video. |
 |
 |
| long time stable standing MPEG 8.1 MB |
Disturbance Force MPEG 4.1 MB |
| 5. Acknowledgements |
| This research is being conducted at Humanoid Robotics Institute (Waseda University). The microcontroller “Japanino” was provided by Gakken Education Publishing Co.,Ltd.. The DC motor with 1 phase incremental encoder is provided by Mabuchi Motor Co., Ltd. This miniature inverted pendulum robot has been designed by 3D CAD software "SolidWorks". We thank to their support. |
| Links Humanoid Robotics Institute, Waseda University SolidWorks Japan K.K. Gakken Education Publishing Co.,Ltd. MABUCHI MOTOR CO., LTD. 
|
