| Japanese / English | ||
| Japanese / English | ||
|
|||||||||||||||||||||||||
| The research on the anthropomorphic flutist robot, started at Waseda University
since 1990, has focused on three main goals: - Clarifying the human motor control while playing the flute - Enabling the communication with humans at the emotional level (i.e. performing a duet with a professional flutist player) - Proposing novel applications of humanoid robots (i.e. transferring flute playing skills to unskilled persons). |
 |
 |
 |
 |
. |
 |
|
| (1990) |
(1992) |
(2002) |
(2003) |
(2004) |
(2005) |
|
| (About WF-3RIX) | (About WF-4) | (About WF-4R) | (About WF-4RII) |
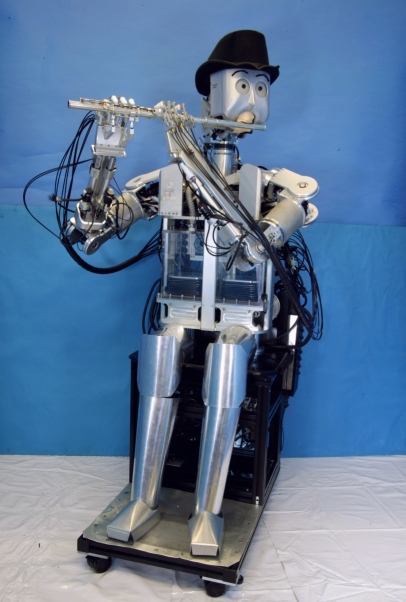
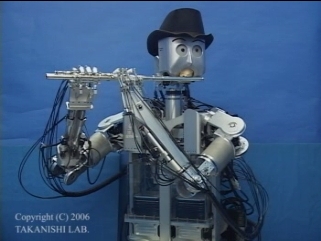
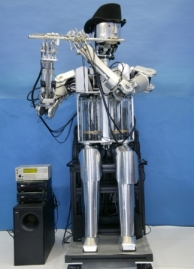
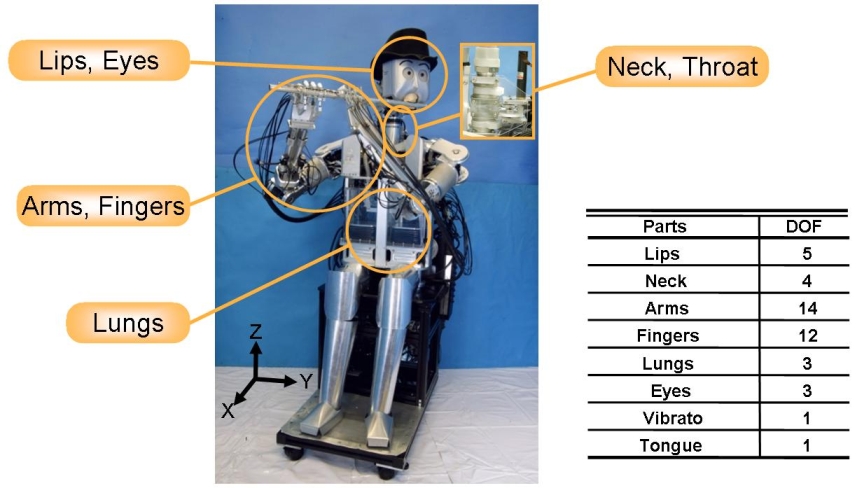
| In this year, the Waseda Flutist Robot No.4 Refined III (WF-4RIII) has
been developed with a total of 43-DOFs which are controlled to reproduce
the human flute playing; where the following organs were mechanically simulated:
eyes (3-DOFs), lips (5-DOFs), neck (4-DOFs), lungs (bellow mechanism with
2-DOFs and valve mechanism with 1-DOF), arms (14-DOFs), finger (12-DOFs),
throat (vocal cord with 1-DOF) and oral cavity (tonguing mechanism). The
WF-4RIII has a weight of 150 kg and a height of 1.7m. The mechanical design of the WF-4RIII enables the robot to reproduce the breathing cycle (the air is taken from the environment), control the air beam parameters (length, angle, speed, width and thickness) required for playing a conventional transversal flute, control the flute positioning, add vibrations to the air beam and simulate the double tonguing technique. In this newest version of the flutist robot, we have also focused on enhancing the expressiveness of the musical performance of the robot. In order to enable the WF-4RIII to generate a musical performance with expressiveness, different musical parameters (i.e. vibrato, note duration, etc.) were extracted from the performance of a professional flutist player and applied on the musical performance system of the robot. From the extracted data, the human performance was modeled by using a Feed-Forward Neural Network trained with the error back-propagation algorithm. As a result, the WF-4RIII can realize a performance with more expressiveness. |
||
 |
||
|
||||||
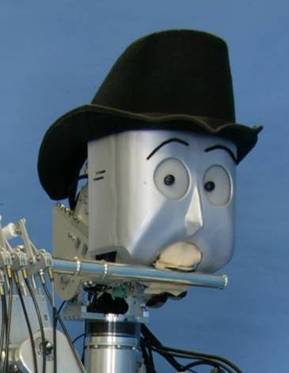
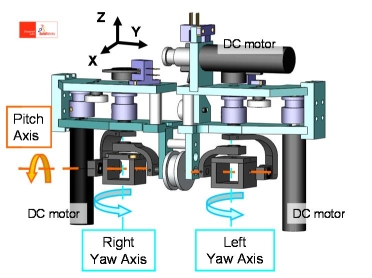
| The eye system has 3-DOFs where two CCD cameras were attached. Using this system,the robot may collaborate with musical partners and interact with the audience during a performance. Face design has changed to be more friendly. The eyebrow can be freely moved to change robot's expression. |
||||||
|
||||||
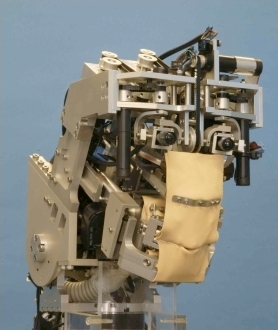
| This mechanism has 5-DOFs to accurately control the air beam direction. The upper lip has 3-DOFs and the lower lip has 2-DOFs. Therefore, it is possible to control the width and thickness of the air beam by controlling the movement of each lip. | ||||||
|
||||||
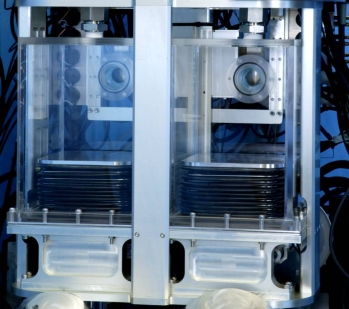
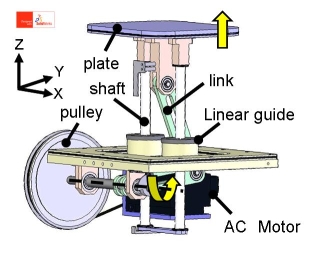
| The lung system of the robot was designed similar to the human one so that it can breathe to control the speed of the air beam while playing the flute. This system is composed by two acrylic cases, which are sealed airtight, containing a bellow which is controlled by a crank mechanism to breathe air in and out from them. Due to the sealed airtight property of the lung system, the bellows have no contact with the acrylic surface during the breathing cycle so that the inhalation time was reduced, the mechanical noise was decreased and furthermore, the quantity of air coming out from the lips was increased. | ||||||
|
||||||
|
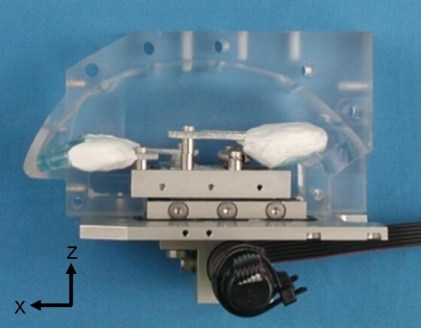
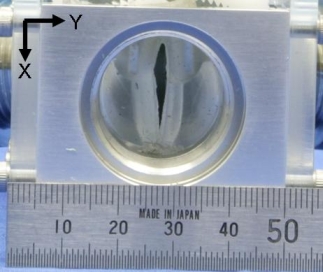
The air coming out from the lung is send to the throat. The new vibrato mechanism was designed to imitate the human vocal cord located inside the throat which is useful for changing the amplitude and frequency to add vibrations to the air flow. |
||||||
|
|
|||||||||
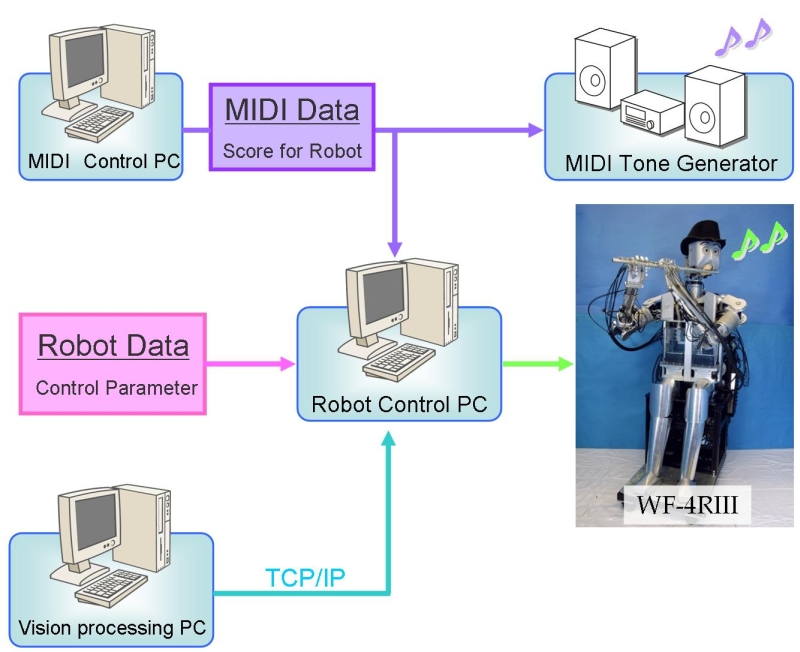
| The MIDI accompaniment system of WF-4RIII consists of three computers to control the robot’s musical performance: one for controlling the robot, and another one to generate the accompaniment MIDI data, and the other one for processing the data from the CCD Cameras. These computers are connected by the MIDI system, and the synchronization of the performance is achieved by using the MIDI signal. |
||
 |
|
|||||||||
| A part of this research was conducted at the Humanoid Robotics Institute (HRI), Waseda University, and part of this was supported by a Grant-in-Aid for the WABOT-HOUSE Project by Gifu Prefecture. |
|||||||
|
|||||||
|
|
| Copyright (c) 2006-2007 Team FLUTE / Takanishi Laboratory | ||
| All rights reserved. |