| Japanese / English | ||
| Japanese / English | ||
|
|||||||||||||||||||||||||
| چ‚گ¼Œ¤‹†ژ؛‚إ‚حپCگl‚جگSگg‚جƒپƒJƒjƒYƒ€‚ً’ا‹y‚µپCگlٹش‚ئƒچƒ{ƒbƒg‚ج‹¤گ¶‚ً–عژw‚µ‚ؤƒqƒ…پ[ƒ}ƒmƒCƒhƒچƒ{ƒbƒg‚جŒ¤‹†ٹJ”‚ًچs‚ء‚ؤ‚¢‚ـ‚·پD‚»‚ج’†‚إگlٹش‚ئڈîڈڈ‚ ‚é‚¢‚حٹ´گ«ƒŒƒxƒ‹‚إ‚جŒً—¬‚ھ‚إ‚«‚邱‚ئ‚حپCƒqƒ…پ[ƒ}ƒmƒCƒhƒچƒ{ƒbƒg‚ة‚¨‚¯‚éڈd—v‚ب‹@”\‚ج‚ذ‚ئ‚آ‚إ‚ ‚é‚ئچl‚¦‚ؤ‚¢‚ـ‚·پD‚»‚±‚إژ„‚½‚؟‚ح‚»‚ج‚و‚¤‚بڈê‚ئ‚µ‚ؤ‚ج‰¹ٹy‹َٹش‚ة’…–ع‚µپCگlٹشŒ`ƒtƒ‹پ[ƒg‰‰‘tƒچƒ{ƒbƒg‚جٹJ”‚ًچs‚ء‚ؤ‚¢‚ـ‚·پD پ@–{ƒچƒ{ƒbƒg‚حپCƒtƒ‹پ[ƒg‰‰‘tژ‚ة‚¨‚¯‚éگl‘جٹeٹيٹ¯‚ج“‚«‚ً‹@ٹBƒ‚ƒfƒ‹‚إچؤŒ»‚·‚邱‚ئ‚إپCگlٹش‚جƒtƒ‹پ[ƒg‰‰‘t‚جƒپƒJƒjƒYƒ€پC•\Œ»—ح‚جچ‚‚¢‰‰‘tژè–@پC‚¨‚و‚رگlٹش‚ئƒچƒ{ƒbƒg‚ئ‚ج‰¹ٹy‹َٹش‚ة‚¨‚¯‚éƒCƒ“ƒ^ƒ‰ƒNƒVƒ‡ƒ“‚ًچHٹw“Iژ‹“_‚ة—§‚ء‚ؤ’ا‹پ‚µپC‰¹ٹy‚ً’ت‚¶‚ؤگlپX‚ةٹ´“®‚ً—^‚¦‚邱‚ئ‚ً–ع“I‚ئ‚µ‚ؤ‚¢‚ـ‚·پD گlٹشŒ`ƒtƒ‹پ[ƒg‰‰‘tƒچƒ{ƒbƒg‚جŒ¤‹†‚ح1990”N‚ةٹJژn‚³‚êپCƒtƒ‹پ[ƒg‰‰‘t‚ة‚¨‚¯‚邳‚ـ‚´‚ـ‚بٹيٹ¯‚ج“‚«‚ً–ح‹[‚µ‚½‹@ٹBƒnپ[ƒhƒEƒFƒA‚جٹJ”‚ئپCMIDI”؛‘t“¯ٹْƒVƒXƒeƒ€‚جچ\’z‚ًچs‚¢پC‚±‚ê‚ـ‚إ‚ةWFƒVƒٹپ[ƒY‚ئ‚µ‚ؤ4‘ج‚جگlٹشŒ`ƒtƒ‹پ[ƒg‰‰‘tƒچƒ{ƒbƒg‚ًٹJ”‚µ‚ؤ‚«‚ـ‚µ‚½پD‚ـ‚½پCƒvƒچƒtƒ‹پ[ƒg‘tژز‚جژلڈ¼‹vگmŒُژپ‚ًƒeƒNƒjƒJƒ‹ƒAƒhƒoƒCƒUپ[‚ةŒ}‚¦پC‰‰‘t‚ج•\Œ»—حŒüڈم‚ئƒچƒ{ƒbƒg‚جژ©—¥گ«‚جŒüڈم‚ً–عژw‚µ‚½پCƒtƒ‹پ[ƒgگپ–آ‰¹‚جژ©—¥’Tچُ‚جŒ¤‹†‚âپCگlٹش‚ً–ح•ي‚µ‚½‰‰‘t‚ةٹض‚·‚錤‹†پC‚ـ‚½گlٹش‚ئƒچƒ{ƒbƒg‚جƒCƒ“ƒ^ƒ‰ƒNƒVƒ‡ƒ“‚ةٹض‚·‚錤‹†‚ًچs‚ء‚ؤ‚¢‚ـ‚·پD |
 |
 |
 |
 |
. |
 |
|
| پ@پ@ (1990) |
پ@ (1992) |
(2002) |
(2003) |
(2004) |
(2005) |
|
| (WF-3RIX‚جڈعچ×) | (WF-4‚جڈعچ×) | (WF-4R‚جڈعچ×) | (WF-4RII‚جڈعچ×) |
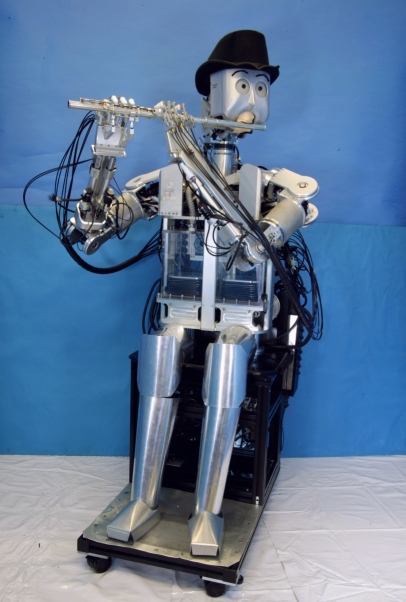
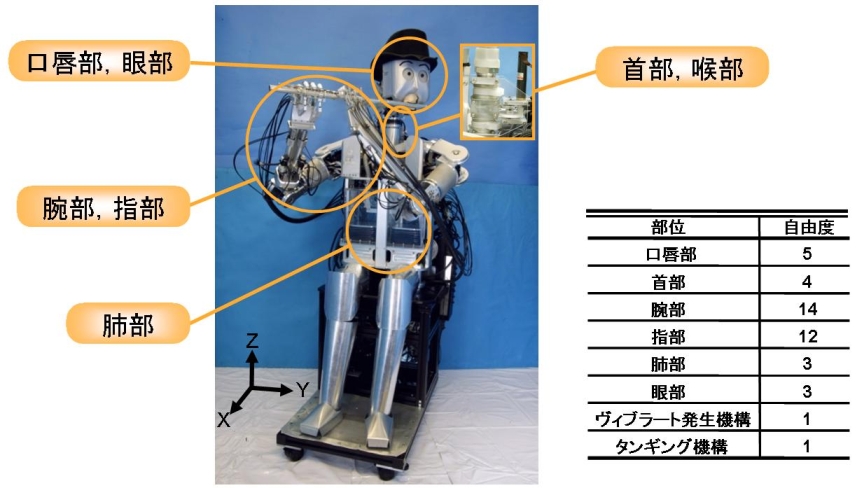
| 2006”N‚ةٹJ”‚µ‚½گlٹشŒ`ƒtƒ‹پ[ƒg‰‰‘tƒچƒ{ƒbƒgWF-4RIII(Waseda Flutist No.4 Refined III)‚حپCƒtƒ‹پ[ƒg‰‰‘t‚ة•K—v‚بگl‘جٹeٹيٹ¯‚ج‹@”\‚ًچؤŒ»‚µ‚½ٹe•”‹@چ\‚ً”ُ‚¦‚ؤ‚¨‚èپC‘S43ژ©—R“x‚إچ\گ¬‚³‚ê‚ؤ‚¢‚ـ‚·پD |
||
 |
||
|
||||||
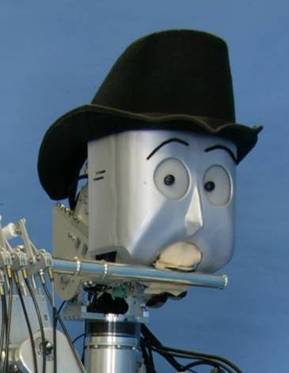
| ٹل•”‚حƒJƒپƒ‰‚ھ“‹چع‚³‚ê‚ؤ‚¨‚苤‰‰ژز‚ئ‚جƒCƒ“ƒ^ƒ‰ƒNƒVƒ‡ƒ“‚ً–عژw‚µ‚ـ‚·پD ژ‹ٹoƒfƒoƒCƒX‚ج“‹چع‚ة”؛‚¢پC‹¤‰‰ژز‚âٹد‹q‚ئ‚و‚èگe‚µ‚ف‚â‚·‚¢ƒfƒUƒCƒ“‚جٹç‚ة‚ب‚ء‚ؤ‚¢‚ـ‚·پD”û•”‚حƒ}ƒOƒlƒbƒg‚إ‚إ‚«‚ؤ‚¢‚邽‚كپCژ©—R‚ة•دŒ`‚³‚¹‚邱‚ئ‚ھ‰آ”\‚ئ‚ب‚ء‚ؤ‚¢‚ـ‚·پDپ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ |
||||||
|
||||||
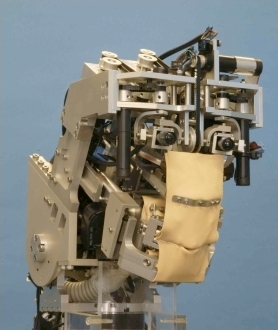
| ŒûگO•”‚حƒtƒ‹پ[ƒg‚جگپ–آ‰¹‚ةچإ‚à‰e‹؟‚ھ‚ ‚è‚ـ‚·پDگO‚ج‘fچق‚ة’ل’eگ«‚جƒSƒ€‚ًژg‚¢پC‚»‚ê‚ً•دŒ`‚³‚¹‚邱‚ئ‚إƒtƒ‹پ[ƒg‚ة‘—‚èچ‚ق‹َ‹Cƒrپ[ƒ€Œ`ڈَ‚ًگ§Œن‚µ‚ـ‚·پD‚ـ‚½گم‚ة‚و‚éƒ^ƒ“ƒMƒ“ƒO‚حپCŒûچo“à•”‚ة‚ ‚éƒQƒ‹•”چق‚ًƒJƒ€‚ة‚و‚ء‚ؤگ…•½ˆع“®‚³‚¹‚ؤچs‚ء‚ؤ‚¢‚ـ‚·پD |
||||||
|
||||||
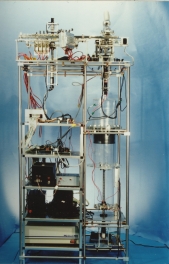
| ”x‚حگlٹش‚ج‚و‚¤‚ةچ¶‰E‚ة•ھ‚©‚ê‚ؤ‚¨‚èپCƒuƒŒƒX‚ًچs‚¢‚ـ‚·پDƒWƒƒƒoƒ‰‚ً—p‚¢‚ؤ–§•آ‚µ‚½‹َٹش‚ًƒNƒ‰ƒ“ƒN‹@چ\‚ة‚و‚è‰ں‚µڈo‚·‚±‚ئ‚إ‹َ‹C‚ً‘—‚èڈo‚µ‚ـ‚·پDگ “®•”‚إ‚ج–€ژC‚ھ‚ب‚¢‹@چ\‚ة‚و‚èپC‹z‹Cژٹش‚ج’ZڈkپCƒپƒJƒjƒJƒ‹ƒmƒCƒY‚ج’لŒ¸‚ًژہŒ»‚µ‚ـ‚µ‚½پD‚ـ‚½پC‹C–§گ«‚ھŒüڈم‚µ‚½‚±‚ئ‚ة‚و‚èپCگ¬گl’jگ«‚ئ“¯“™‚ج”xٹˆ—ت‚ً“¾‚ç‚ê‚ـ‚µ‚½پD | ||||||
|
||||||
| ”x‚©‚ç‰ں‚µڈo‚³‚ꂽ‹َ‹C‚حچA•”‚ة“ü‚è‚ـ‚·پDچA•”‚ة‚حگlٹش‚جگ؛‘ر‚ً–ح‚µ‚½ƒ”ƒBƒuƒ‰پ[ƒg”گ¶‹@چ\‚ھ‚ ‚èپC”x‚©‚ç‰ں‚µڈo‚³‚ꂽ‹َ‹C‚ةگU•‚ج•د‰»‚âگU“®گ”‚ج•د‰»‚ً‚آ‚¯پCƒ”ƒBƒuƒ‰پ[ƒg‘t–@‚ًچs‚¢‚ـ‚·پD | ||||||
|
|
|||||||||
| گlٹشŒ`ƒtƒ‹پ[ƒg‰‰‘tƒچƒ{ƒbƒgWF-4RIII‚حپC”؛‘t—pMIDIƒfپ[ƒ^‚جڈo—ح‚ًچs‚¤MIDIƒRƒ“ƒgƒچپ[ƒ‹ƒpƒ\ƒRƒ“‚ئƒچƒ{ƒbƒgگ§Œن—pƒpƒ\ƒRƒ“‚¨‚و‚ر‰و‘œڈˆ——pƒpƒ\ƒRƒ“‚ة‚و‚艉‘t‚ًچs‚ء‚ؤ‚¨‚è‚ـ‚·پDMIDIƒRƒ“ƒgƒچپ[ƒ‹ƒpƒ\ƒRƒ“‚حMIDI‰¹Œ¹‚ض‚ج”؛‘tƒfپ[ƒ^‚ًڈo—ح‚µپCMIDIگMچ†‚ة“¯ٹْ‚µ‚ؤƒچƒ{ƒbƒgگ§Œنƒpƒ\ƒRƒ“‚ھƒچƒ{ƒbƒg‚جگ§Œن‚ًچs‚¢‚ـ‚·پDƒچƒ{ƒbƒgگ§Œنƒpƒ\ƒRƒ“‚حƒچƒ{ƒbƒgƒfپ[ƒ^‚ئŒؤ‚ٌ‚إ‚¢‚éƒfپ[ƒ^‚ً—ک—p‚µ‚ؤ‰‰‘t‚ًچs‚¢‚ـ‚·پDƒچƒ{ƒbƒgƒfپ[ƒ^‚ة‚حٹe‰¹–¼‚ة‘خ‚·‚éƒچƒ{ƒbƒg‚جگ§Œنƒpƒ‰ƒپپ[ƒ^‚ھ‹Lک^‚³‚ê‚ؤ‚¢‚ـ‚·پD‚ـ‚½‰و‘œڈˆ——pƒpƒ\ƒRƒ“‚إ‚حCCDƒJƒپƒ‰‚©‚çژو‚èچ‚ٌ‚¾ƒfپ[ƒ^‚جڈˆ—‚ًچs‚¢‚ـ‚·پD |
||
 |
|
|||||||||
| –{Œ¤‹†‚ح‘پˆî“c‘هٹwƒqƒ…پ[ƒ}ƒmƒCƒhŒ¤‹†ڈٹ‚ج‚à‚ئ‚إپCٹٍ•ŒŒ§‚©‚ç‚جˆد‘ُ‚إ‚ ‚éWABOT-HOUSEƒvƒچƒWƒFƒNƒg‚ة‚و‚èچs‚ي‚ê‚ـ‚µ‚½پD‚±‚±‚ةٹ´ژس‚جˆس‚ً•\‚µ‚ـ‚·پD |
|||||||
|
|||||||
|
|
| Copyright (c) 2006-2007 Team FLUTE / Takanishi Laboratory | ||
| All rights reserved. |