| ENGLISH/JAPANESE |
 |
|||||
|
|
|||||
|
|
|
|
||
|
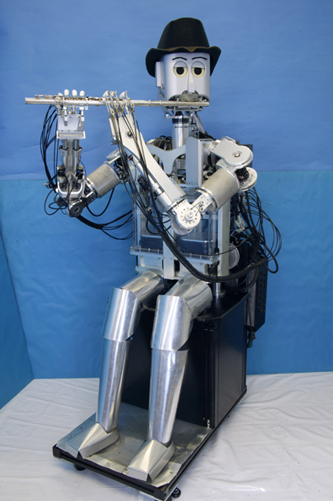
The research on the anthropomorphic flutist robot, started at Waseda University since 1990, has focused on three main goals: - Clarifying the human motor control while playing the flute from an engineering point of view - Enabling the communication with humans at the emotional level of perception (i.e. performing a duet with a professional flutist player) - Proposing novel applications of humanoid robots (i.e. transferring flute playing skills to unskilled persons). |
 |
|
 |
 |
 |
 |
 |
| WF-1 (1990) |
WF-2 (1992) |
WF-3RIX (2002) |
WF-4 (2003) |
WF-4RIII (2006) |
| (About WF-3RIX) | (About WF-4) | (About WF-4RIII) | ||
| -TOP- |
|
|
|
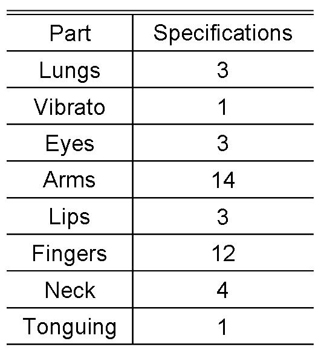
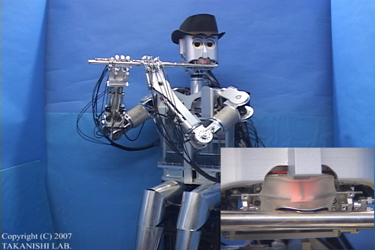
| In 2007, we developed the anthropomorphic flutist robot WF-4RIV(Waseda
Flutist No.4 Refined IV) with 41-DOFs which has enhanced its flute performance
by producing more natural notes and smoother transitions between notes.
In this year, the lips and tonguing mechanisms have been re-designed to
reproduce more accuraterly the human organs. |
|
 |
 |
 |
 |
|
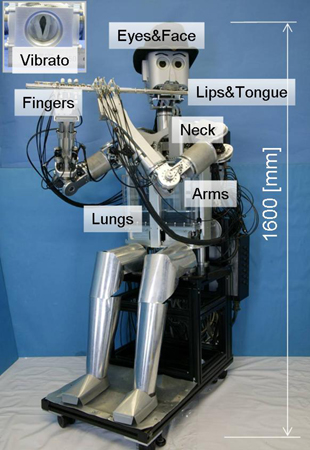
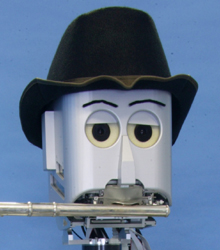
| The eye system has 3-DOFs; where two CCD cameras were attached. Using this
system, the robot may be able of interacting with musical partners and
with the audience during a performance. The face design was re-desugbed to become more friendly. In addition, the eyebrow can be freely moved to change robot's expression. |
||
| Face(left)・・・・・ Head Mechanism(right)・・・・・ |
| -UP- |
 |
 |
|
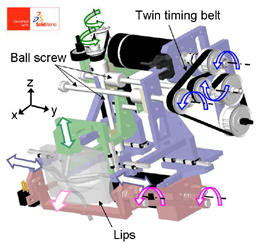
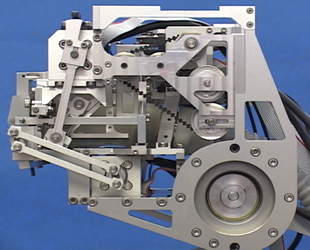
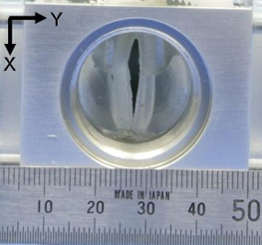
| The accurate control of the shape of the lips during the flute performance facilitates the control of the air beam parameters required to produce flute sound. The artificial lips were designed to reproduce mechanically the shape and elasticity of the human lips. In order to control the shape of the lips, an array of pins were embeded into the artificial lips so that high control accuracy is achieved. |
||
・・・・・Mouth(left) ・・・・・Mouth Mechanism(right) |
| -UP- |
 |
 |
|
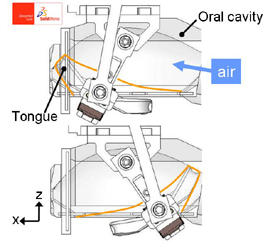
| The tonguing mechanism has been designed to reproduce the double tonguing
tecnique. In particular, an aritficial tongue has been designed to stop
the air flow at the tip of the oral cavity and at the rear. As a result, attack of the sound becomes faster, and more natural transitions between notes were achieved. |
||
| Tongue side view(left)・・・・・ Tonguing(right)・・・・・ |
| -UP- |
 |
 |
|
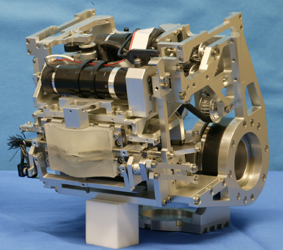
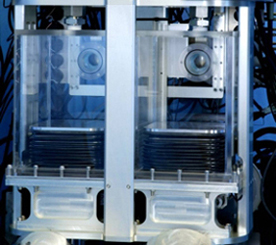
| The vibrato mechanism was designed to imitate the human vocal cord located inside the throat which is useful for changing the amplitude and frequency to add vibrations to the air flow.
The lung system is composed by two acrylic cases, which are sealed airtight, containing a bellow which is controlled by a crank mechanism to breathe air in and out from them. |
||
| ・・・・・Neck(left) ・・・・・Lungs(right) |
| -UP- |
 |
 |
|
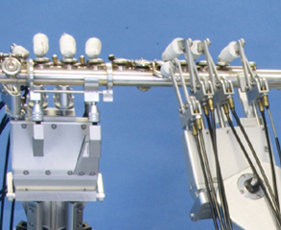
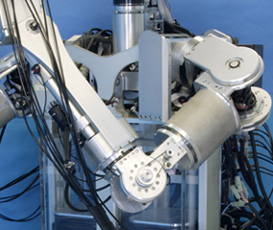
| All fingers can open and close the flute key in 8[Hz]. The flute is completely fixed to the righthand with the flute mount. The arm system has 7-DOFs. The upper arm has 4-DOFs and the fore arm has 3-DOFs. | ||
| Fingers(left)・・・・・ Arms(right)・・・・・ |
| -UP- |
| -TOP- |
|
|
|
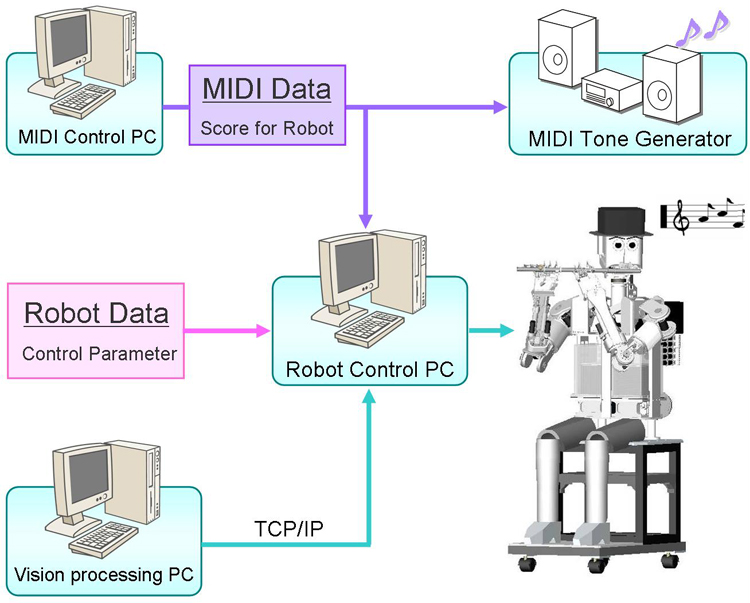
| The MIDI accompaniment system of WF-4RIV consists of three computers to control the robotAfs musical performance: one for controlling the robot, and another one to generate the accompaniment MIDI data, and the other one for processing the data from the CCD Cameras. These computers are connected by the MIDI system, and the synchronization of the performance is achieved by using the MIDI signal. | |
 |
| -TOP- |
|
|
 |
Flute peformance of WF-4RIV(mpeg/1:36/16MB) AuThe flight of the bumble beeAv composed by Rimsky-Korsakov |
| -TOP- |
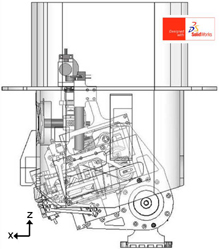
| A part of this research was conducted at the Humanoid Robotics Institute (HRI), Waseda University, and part of this was supported by a Grant-in-Aid for the WABOT-HOUSE Project by Gifu Prefecture. WF-4RIV has been designed by 3D CAD software "SolidWorks". Special thanks to SolidWorks Japan K.K. for the software contribution. |
|
| Humanoid Robotics Institute, Waseda University | |
| WASEDA UNIVERSITY WABOT-HOUSE LABORATORY | |
| SolidWorks Japan K.K. |
| -TOP- |
| Takanishi Laboratory | Last Update 2007.10.27 Copyright(C) 2007-2008 Team Flute /Takanishi Laboratory All Rights Reserved. |