| ENGLISH/JAPANESE |
 |
|||||
|
|
|||||
|
|
|
|
||
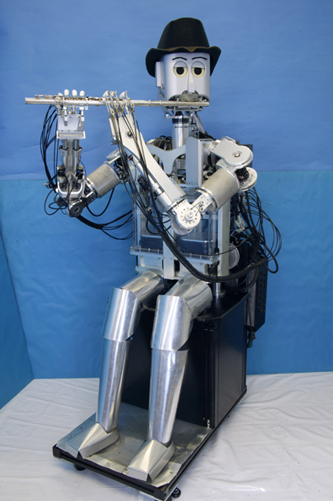
| 高西研究室では,人の心身のメカニズムを追及し,
人間とロボットの共生を目指してヒューマノイドロボットの
研究開発を行っています.その中で人間と情緒あるいは感性レベルでの交流ができることは,ヒューマノイドロ
ボットにおける重要な機能のひとつであると考えています.そこで私たちはそのような場としての音楽空間に着
目し,人間形フルート演奏ロボットの開発を行っています. 本ロボットは,フルート演奏時における人体各器官の働きを機械モデルで再現することで, 人間のフルート演奏のメカニズム,表現力の高い演奏手法,および人間とロボットとの音楽空間におけるインタラクションを工学 的視点に立って追求し,音楽を通じて人々に感動を与えることを目的としています. 人間形フルート演奏ロボットの研究は1990年に開始され, フルート演奏におけるさまざまな器官の働きを模擬した機械ハードウェアの開発と,MIDI伴奏同期システムの構築を行い, これまでにWFシリーズとして4体の人間形フルート演奏ロボットを開発してきました.また,プロフルート奏者の 若松久仁光氏をテクニカルアドバイザーに迎え, 演奏の表現力向上とロボットの自律性の向上を目指したフルート吹鳴音の自律探索の研究や,人間を模倣した演奏に関する研究, さらに教育支援ロボットとしての利用といった人間とロボットのインタラクションに関しても研究を進めています. |
 |
|
 |
 |
 |
 |
 |
| WF-1 (1990) |
WF-2 (1992) |
WF-3RIX (2002) |
WF-4 (2003) |
WF-4RIII (2006) |
| (WF-3RIXの詳細) | (WF-4の詳細) | (WF-4RIIIの詳細) | ||
| -TOPへ- |
|
|
|
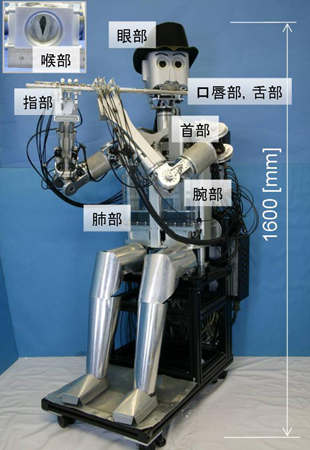
| 2007年に開発した人間形フルート演奏ロボット
WF-4RIV(Waseda Flutist No.4 Refined IV)は,フルート演奏に必要な人体各器官の機能を再現した各部機構を備えており,
全41自由度で構成されています. |
|
 |
 |
 |
 |
|
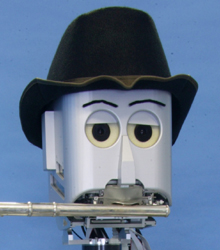
眼部にはカメラが搭載されており, 視覚を用いての共演者とのインタラクションを目指しています. 顔は,共演者や観客とより親しみやすいデザインとなっています.眉部はマグネットでできているため,自由に変形させることが可能です. |
||
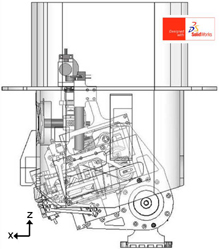
| 顔部(left)・・・・・ 頭部機構図(right)・・・・・ |
| -UP- |
 |
 |
|
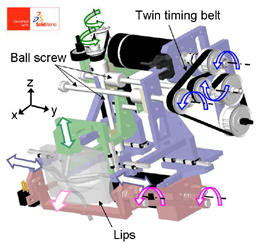
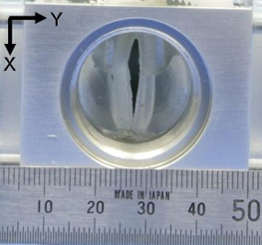
唇形状は吹鳴音に最も大きな影響を与える要素です.より人間らしい口唇部を目指して, 人間に近い形状を持つ人工唇を製作しました.素材にゴムを用いているため,弾力も人間に近いものとなっています.唇内に埋め込んだピンを動かすことで,唇形状を制御し,空気ビームの形状を調節しています. |
||
| ・・・・・口唇部(left) ・・・・・口唇部の機構図(right) |
| -UP- |
 |
 |
|
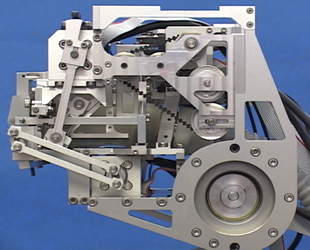
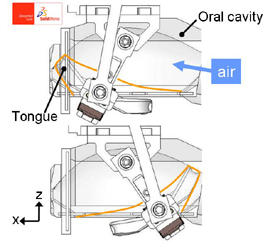
口腔も唇と同様に素材にゴムを用いています.タンギング時は,舌が口腔底面 のゴム膜を押し上げて,空気をせき止めます.これにより音の立上りを早め,歯切れの良い吹鳴音を実現します. |
||
| 舌部側面(left)・・・・・ タンギング時の舌の動き(right)・・・・・ |
| -UP- |
 |
 |
|
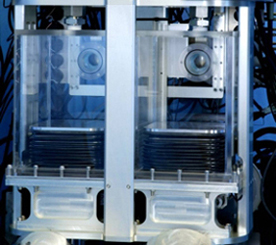
首部の後方に位置する喉部には人間の声帯を模したヴィブラート発生機構があり,肺から押し出された空気に振幅の変化や振動数の変化を加えます. 肺は人間のように左右に分かれており,ブレスを行います. ジャバラを用いて密閉した空間をクランク機構により押し出すことで空気を送り出します. |
||
| ・・・・・人工声帯(left) ・・・・・肺部(right) |
| -UP- |
 |
 |
|
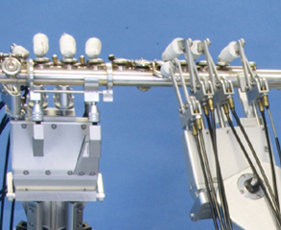
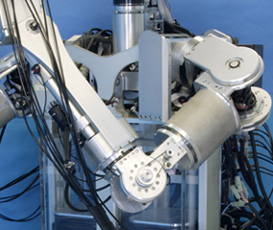
指部は1秒間に8回の開閉動作を行う高速な指使いにより, トリル奏法が可能です.また、フルートは精密チャックによって右手にしっかり固定されており、安定して演奏することができます. 腕部は7自由度で構成されており,口唇部に対して歌口の位置を高精度に制御することが可能です. |
||
| 指部(left)・・・・・ 腕部(right)・・・・・ |
| -UP- |
| -TOPへ- |
|
|
|
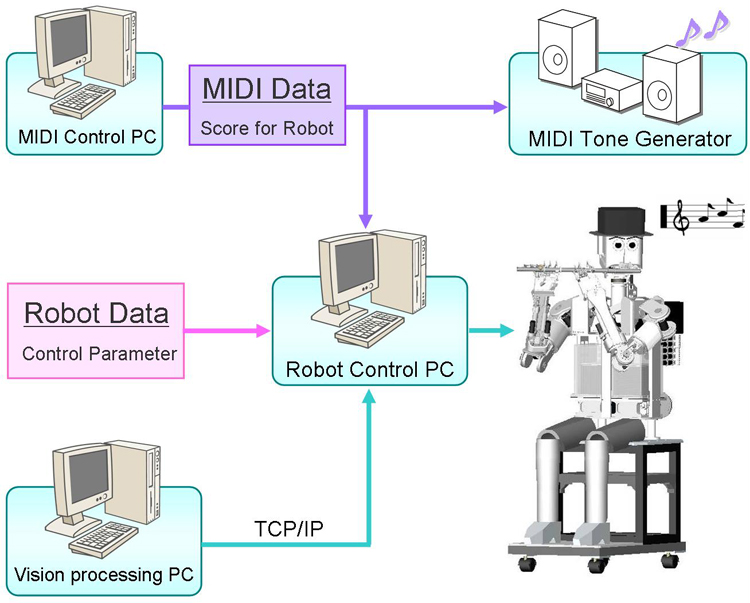
| 人間形フルート演奏ロボットWF-4RIVは, 伴奏用MIDIデータの出力を行うMIDIコントロールパソコンとロボット制御用パソコンおよび画像処理用パソコンにより演奏を行っています. MIDIコントロールパソコンはMIDI音源への伴奏データを出力し,MIDI信号に同期してロボット制御パソコンがロボットの制御を行います. ロボット制御パソコンはロボットデータと呼んでいるデータを利用して演奏を行います.ロボットデータには各音名に対するロボットの 制御パラメータが記録されています.また画像処理用パソコンではCCDカメラから取り込んだデータの処理を行います. | |
 |
| -TOPへ- |
|
|
|
|
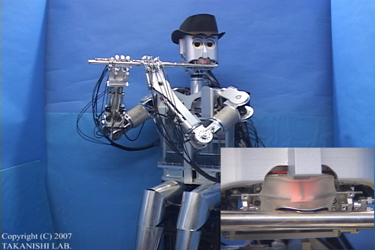
WF4-RIVのフルート演奏(mpeg形式/1分36秒/16MB) 「熊蜂の飛行」 作曲: リムスキー・コルサコフ |
| -TOPへ- |
|
|
|
| 本研究は早稲田大学ヒューマノイド研究所のもとで,
岐阜県からの委託であるWABOT-HOUSEプロジェクトにより行われました.ここに感謝の意を表します. WF4-RIVは3D-CADソフトウェア "SolidWorks" を用いて設計しました.本ソフトウェアを提供して頂きましたソリッドワークス・ジャパン株式会社にも感謝致します. |
|
| 早稲田大学ヒューマノイド研究所 | |
| 早稲田大学WABOT-HOUSE研究所 | |
| ソリッドワークス・ジャパン株式会社 |
| -TOPへ- |
| Takanishi Laboratory | Last Update 2008.10.30 Copyright(C) 1990-2008 Team Musical Performance Robot /Takanishi Laboratory All Rights Reserved. |