System-Larning
Accelerating the Rat's Learning Speed
In 2002, we succeeded in training rats to push the
levers on the robot to obtain food. For animals, learning to
perform new behavior which was not equipped by nature is
very hard. Therefore, in our previous experiment, an
experimenter taught that behavior by pushing the levers and
feeding a food pellet in front of the rats, and we then
considered those rats might learn the robot functions. This
learning process is very interesting. Therefore, we tried to train the rats to that behavior, pushing the levers to obtain food, by the robot autonomously demonstrating. We then developed a new operation generation algorithm that enabled the robot to autonomously demonstrate its functions. We called this algorithm "Accelerating the Rat's Learning Speed Algorithm".
Accelerating the Rat's Learning Speed Algorithm
To train animals to difficult or complex behavior
that would rarely occur spontaneously is difficult. However,
it is possible to train such behavior by dividing learning
process into small steps and increasing difficulty of them
in step-by-step manner. This is what is called "shaping".
"Shaping" is a method of operant conditioning proposed by
Skinner. "Accelerating the Rat's Learning Speed Algorithm"is
an operational pattern generation algorithm for the robot
based on the concept of "shaping".Therefore, we divided the learning process into three steps. We then defined the local target of each step and constructed their operational patterns to increase the chances that the rats spontaneously performed the local target behavior.
Level 1:Reinforcement of rat's motivation
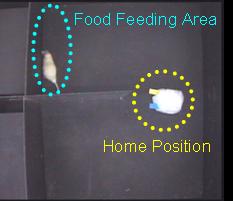
Fig. 1 Providing a food
Rats rarely move in a situation never previously
experienced due to their natural sense of caution.
The local target behavior of step 1 is active movement,
the simplest kind of behavior. In this step, the food
feeder routinely releases a food pellet. In our previous
experiment, the rats that had obtained food in the
experimental field moved actively compared to those that
had not. Therefore, we believe that those constant
feedings are effective in reinforcing the rat’s motivation
for movement. When the total movement distance of the rat
exceeds a threshold value, this step is finished and the
next step is started.
Level 2:Conditioning the rat to approach to WM-6
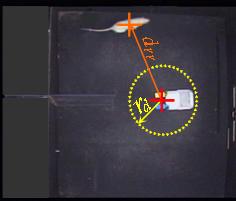
Fig. 2 Detection of the rat's approach
The local target behavior of step 2 is the approach to the
robot. To attract the rat’s interest in WM-6, the robot
routinely moves to the front of the food feeder and the
food feeder releases a food pellet at the moment the robot
arrives there. We believe the rat learns the relationship
between the robot and the feedings through these routine
movements and feedings. It is then expected the rat would
be interested in WM-6 and hence approach it.
When the rat’s approach to WM-6 is detected, the robot
moves to the front of the food feeder. To reinforce the
approach of the rat to the robot, the food feeder then
releases a pellet. After that the robot returns to the
home position.
It is possible to detect the rat’s approach to the robot
through the image processing. When the number of the
detection and reinforcement approaches exceeds a threshold
value, this step is finished and the next step is started.
Level 3:Conditioning the rat to push the levers
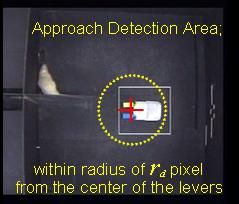
Fig. 3 Narrowing the
The
local target behavior of step 3, final step, is pushing
the levers on WM-6. At the beginning of this step, when
the rat approaches the robot, the robot moves to the front
of the food feeder and the food feeder then releases a
pellet. After enough reinforcements, the rd (radius of
approach detection area) is reduced every time the rat
approaches the robot. We believe that the rat would then
approach the robot close quarters and it is subsequently
expected that the rat would occasionally push the levers
on the robot.
When the rat pushes the levers on WM-6, the robot moves to
the front of the food feeder and the food feeder releases
a pallet. In this way, it is possible to train the rat to
push the levers on the robot. When the number of lever
pushes exceeds a threshold value, this step is finished.
Thus we then consider the rat learn to push the levers to
obtain food.
Evaluation Experiment
We
conducted an experiment for evaluating the accelerating
rat’s learning speed algorithm. The experiment was
conducted five trials using five rats. The rats were male
albino-rats without any experimental experience and bred
singly in breeding cages.Three of them (an experimental
group:Rats 1~3) had the algorithm applied while the others
(a control group:Rats 4, 5) had not.
We released the rat into the experimental field and
started a trial. When
the rat learn to push the levers to obtain food, we
finished the trial.
Results
In
this experiment, the rats in the experimental group
learned to push the levers on WM-6 to obtain food. The
learning processes of these three rats are shown in Figs.
10~12. The rats total movement distance and the cumulative
number of rat approaches and rat lever pushes are shown in
these graphs.
On the other hand, the rats in the control group didn't
learn to push the levers on WM-6.
Therefore, using the accelerating rat’s learning speed
algorithm, we succeed in training a new behavior, "pushing
levers on the robot" to rats by the robot autonomous
demonstration.
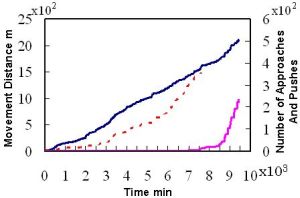
Fig.4 Cumulative Record of Rat 1
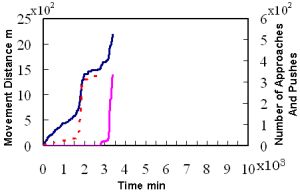
Fig.5 Cumulative Record of Rat 2
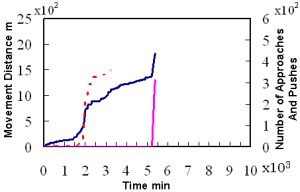
Fig.6 Cumulative Record of Rat 3