WM(Waseda Mouse)
WM-6(Waseda Mouse No.6)
We developed a rat-robot, WM-6 (Waseda Mouse No. 6) which can interact with rats. WM-6 is a small mobile robot, and radio controlled by a PC. In addition, WM-6 has two levers to interact with rats. The dimensions and performance of WM-6 almost equal to those of a mature rat.
1.Drive System
WM-6 has 2 drive wheels and 1 omni-directional ball caster. Due to this mobile mechanism, WM-6 is non-holonomically constrained.
| Weight | 520 [g] |
|---|---|
| Size | 170 x 85 x 100 [mm] |
| Max Speed |
1.0 [m/s] |
| Max Rotational Speed |
6.0 [rad/s] |
2.Battery
WM-6 has a Li-ion battery and operates constantly for a minimum 120 [min]. In addition, using the battery exchanger , it is possible to automatically exchange the battery in the experimental field. Therefore, WM-6 is useful for the long experiments which exceed 120 [min].
3.Control System
WM-6
has a microcontroller PIC (16F877, microchip) and a
Bluetooth communication unit.
The electronic system configuration of WM-6 is shown in
Fig. 2. The PIC controls the directions and velocities of
the left and right wheels (via DC motors) separately
according to instructions sent from the PC through the
Bluetooth unit. WM-6 has a dual-bridge motor driver and
the DC motors are controlled by PWM. In addition, the PIC
measures the battery voltage and states of each lever and
sends these data to the PC in real time.
4.Interaction Module; Levers
WM-6
has two levers to interact with rats. On animal
psychology, levers have been used in many experiments
using rats, for example "the Skinner Box". Pushing levers
is not an innate behavior of rats, meaning it is highly
likely that pushing the levers observed in experiments is
an intentional behavior. This allow a quantitative
evaluation of the interaction.
These levers consist of touch sensors which are
electrically connected to the PIC, and the PIC sends the
logic level of each touch sensor to the PC. It is possible
to use this data as a parameter on the operation generator
module on the PC (as discribed later).
5.Accelerating the Rat's Learning Speed Algorithm
In
2002, we succeeded in training rats to push the levers on
the robot to obtain food. For animals, learning to perform
new behavior which was not equipped by nature is very
hard. Therefore, in our previous experiment, an
experimenter taught that behavior by pushing the levers
and feeding a food pellet in front of the rats, and we
then considered those rats might learn the robot
functions. This learning process is very interesting.
Therefor, we tried to train the rats to that behavior,
pushing the levers to obtain food, by the robot
autonomously demonstrating. We then developed a new
operation generation algorithm that enabled the robot to
autonomously demonstrate its functions. We called this
algorithm "Accelerating the Rat's Learning Speed
Algorithm.
(Accelerating the Rat's
Learning Speed Algorithm)
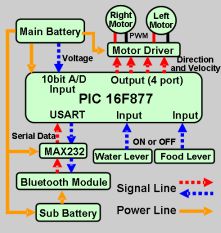
Fig.1 System Configuration of WM-6
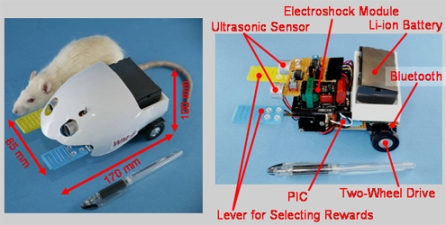
Fig.2 Rat and WM-6
WM-8(Waseda Mouse No.8)
We developed a WM-8 which improved small mobile robot WM-6 that an interaction with the rat was possible. As for WM-8, a pellet feeder is implemented, and a robot can exhibit feeds for a rat.
| Weight | 585 [g] |
|---|---|
| Size |
120 x 100 x 100 [mm] |
| Max Speed |
1.0 [m/s] |
| Max Rotational Speed |
6.0 [rad/s] |
1.Drive System
Like WM-6, two wheels and, wheel wfich is an independent two-wheel-drive type robot using one ball caster what has a larger path than WM-6, and aimed at improvement in turning characteristics etc.
2.Battery
WM-8 has a Li-ion battery NP-F770(7.2V /10.8Wh(1,500mAh))for a power supply, and drive of 120[min] is possible in succession.
3.Control System
WM-8
has a microcontroller PIC (16F877, microchip) and a
Bluetooth communication unit.
The
PIC controls the directions and velocities of the left and
right wheels (via DC motors) separately according to
instructions sent from the PC through the Bluetooth unit.
WM-6 has a dual-bridge motor driver and the DC motors are
controlled by PWM.
4.Pellet Feeder
The pellet feeder is mounted on WM-8, and positive reinforcement child(food) can be presented directly from the robot to the rat. As a result, construction of more various experiment systems can be expected.
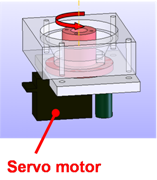
Fig.3 Pellet feeder

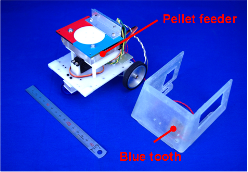
Fig4 WM-8