WM(Waseda Mouse)
WM-6(Waseda Mouse No.6)
私たちはラットとのインタラクションが可能な小型移動ロボットWM-6を開発しました.WM-6はラットとのインタラクションのために2個のレバーを搭載しており,PCによって遠隔操縦されます.またその運動性能や寸法は成体ラットとほぼ同程度となっています.
1.駆動機構
WM-6の駆動機構は2個の駆動輪と1個の全方向移動可能な受動輪より構成しました.この駆動機構によりWM-6は非ホロノミックな拘束を受ますが,両輪駆動ですので小回り運転をすることができます.
| 重さ | 520 [g] |
|---|---|
| サイズ | 170 x 85 x 100 [mm] |
| 最高速度 | 1.0 [m/s] |
| 最高回転速度 | 6.0 [rad/s] |
2.電源
WM-6の電源にはLi-ion電池を搭載し,連続して120[min]の活動が可能です.また,電池交換装置を使用すること で,実験フィールド内で電池交換することが可能であり,120[min]を超える長時間実験にも対応しています.
3.通信と制御
WM-6にはPICマイコンとBluetooth通信モジュールを搭載し,制御PCによって遠隔操縦しています.
ロボットの電気的構成はFig.2になっています.PICマイコンはBluetooth通信モジュールを介して制御PCからの指令を受信し,左右両輪(DCモータ)の回転方向と速度を制御しています.DCモータの駆動にはデュアルフルブリッジドライバを使用し,PWM制御によってモータの速度を制御しています.また,PICマイコンは電池電圧とレバーの状態を常時監視し,その情報を制御PCに送信しています.
4.レバー
WM-6はラットとのインタラクションを行うために2個のレバーを搭載しています.私たちは動物心理学で非常に有名な実験装置であるスキナー箱にヒントを得て,ロボットにレバーを搭載することを考えました.ラットにとってレバーを押す行動は不自然な行動ですが,そのために実験中に観察されたレバーを押す行動が意識的な行動であるといえます.これによってインタラクションを定量的に計測することが可能です.
これらのレバーはタッチセンサになっており,PICを通してその状態をPCに送信しています.このレバーはロボットの行動を生成するうえでのパラメータとして使用することが可能で,レバーが押されたことをトリガとしてロボットにある特定の行動を行わせることが可能です.
5.学習促進実験
これまでの実験において,私たちはラットのレバー押し行動をロボットとのインタラクション1つとして計測を行ってきました.しかし動物にとって,先天的に備わっていない新たな行動を獲得するのは非常に困難と考えられます.私たちの実験ではこれまで,実験者がラットにレバー押し行動を教授していました.そこで,このレバー押し行動をロボット自身によって教授させることを試みました.(学習促進実験詳細へ)
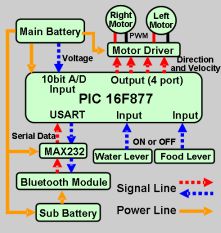
Fig.1 System Configuration of WM-6
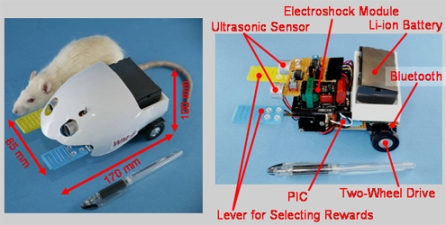
Fig.2 Rat and WM-6
WM-8(Waseda Mouse No.8)
ラットとのインタラクションが可能な小型移動ロボットWM-6を改良したWM-8を開発しました.WM-8は餌供給装置が実装されており,ラットに対しロボットが直接餌を正の強化子として呈示することが可能です.
| 重さ | 585 [g] |
|---|---|
| サイズ | 120 x 100 x 100 [mm] |
| 最高速度 | 1.0 [m/s] |
| 最高回転速度 | 6.0 [rad/s] |
1.駆動機構
WM-6と同様に2つの車輪と1つのボールキャスタを用いた独立2輪駆動型のロボットです.車輪はWM-6よりも径が大きいものを使用し,旋回性能向上などを図りました.
2.電源
電源にはSONY製のLi-ion電池NP-F770(7.2V/10.8Wh(1,500mAh))を搭載し,連続して120[min]の駆動が可能です.
3.通信と制御
WM-8にはPICマイコンとBluetooth通信モジュールを搭載し,制御PCによって遠隔操縦しています.
.PICマイコンはBluetooth通信モジュールを介して制御PCからの指令を受信し,左右両輪(DCモータ)の回転方向と速度を制御しています.DCモータの駆動にはデュアルフルブリッジドライバを使用し,PWM制御によってモータの速度を制御しています.また,PICマイコンは電池電圧を常時監視し,その情報を制御PCに送信しています.
4.餌供給装置
WM-8には餌供給装置が実装され,ロボットから直接ラットに対して正の強化子(餌)が呈示することが出来ます.これにより,より多様な実験系の構築が期待できます.
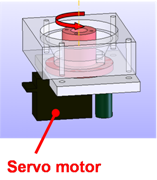
Fig.3 Pellet feeder

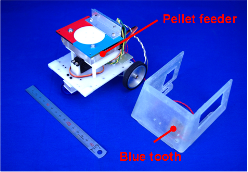
Fig4 WM-8