WR(Waseda Rat) Series
WR-1(Waseda Rat No.1)
ラットとのインタラクション実験を通して,ラットの社会性を評価する為に,よりラットを模擬した4足アニマロイドWR-1の開発を行いました.WR-1は4足歩行をはじめ,首振り,立ち上がりといったラットの行動を再現することができます.
1.仕様
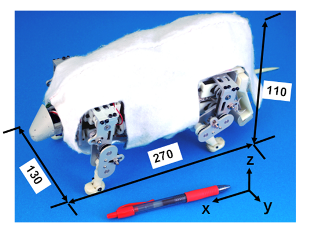
Fig.1 WR-1
| サイズ | 270 × 130 × 110 [mm] |
|---|---|
| 重量 | 1150[g] |
| 自由度 | 15-DOF (各脚×3,頸部×1,腰部×2) |
| 電源 | Li-Polymer TP2100-2SPL 7.4[V]2100[mAh] |
2.駆動機構
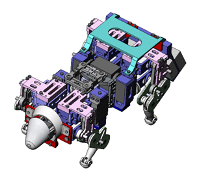
Fig.2 3D schematic view of WR-1
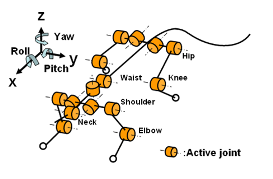
Fig.3 DOF configuration
(a) 脚部
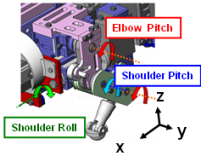
Fig.4 Drive mechanism of leg
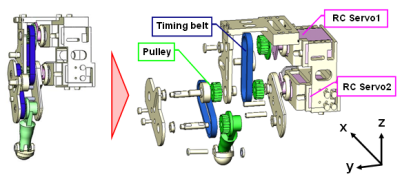
Fig.5 Exploded view
WR-1では各関節のアクチュエータにサーボモータを使用している為,ラットの脚の形状の模倣から各関節に直接モータを配置せず,モータを全て胴体部に集めることで脚自体の構成を小さくしました.そして,タイミングベルトやプーリを使用することで,力を各関節へ伝達する仕組みになっています.具体的にはサーボモータが上下に2つ配置され,下側のサーボモータで脚のShoulder(Hip)のPitch回転を行い,上側のモータではタイミングベルトを2段使用することでElbow(Knee)のPitch回転を行います.
(b) 頚部・腰部
頸部のPitch回転・腰部のPitch・Yaw回転も全てサーボモータによって制御されます.頸部には小型サーボモータが直付けされており,頭部を上下に振る動きが可能です.また,腰部のYawはFig.16に示す様に,パラレルリンク機構が併用され,胴体をYaw方向に回転することが可能です.腰部のPitchには両端支持のサーボが使用され,アームリンクを介して胴体をFig.17のように持ち上げることが可能です.この自由度は主に立ち上がり動作を行う際に使用されます.
3.制御系
WR-1にはマイクロコンピュ-ターdsPICとBluetooth通信モジュールが搭載されており,制御PCによって遠隔操縦されます.オフラインで生成された時系列の各関節の角度データをロボットの動作直前に読み込み,PCからBluetoothを介してdsPICに指令が送られます.そこから,各関節に使用されているサーボモータに制御指令が送られ動作を行います.
4.モーションパターンの作成
各モーションパターンの作成には,本研究室で2002年に開発されたパターンジェネレータを使用しています.まずモーメント補償軌道算出に必要なパラメータを設定し,続いて実際にモーメント補償軌道の算出を行います.最後に算出されたデータを基に,逆運動学計算を行い,各関節の角度を求め,全関節分の時系列の角度データをもって1つのモーションパターンとして出力します.
5.動作ムービー
WR-2(Waseda Rat No.2)
ラットとのインタラクションが可能な4足アニマロイドWR-1を改良したWR-2を開発しました.よりラットに形状を近づけるため,さらなる小型化および軽量化を実現しました.
1. 仕様
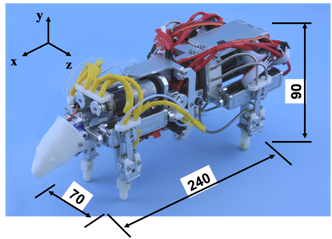
Fig.8 WR-2
| サイズ | 240 × 70 × 90 [mm] |
|---|---|
| 重量 | 850[g] |
| 自由度 | 15-DOF (各脚×3,頸部×1,腰部×2) |
| 電源 | Li-Polymer TP2100-2SPL 7.4[V]1320[mAh] |
2. 駆動機構
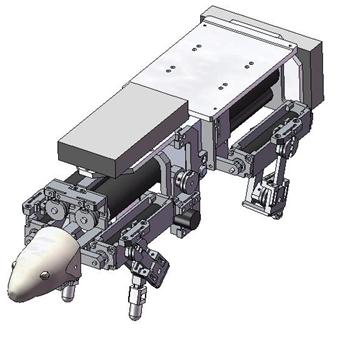
Fig.9 3D schematic view of WR-2
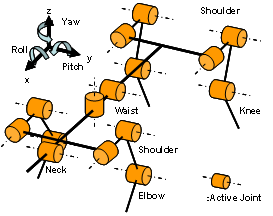
Fig.10 DOF configuration
(a) 脚部
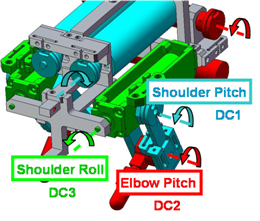
Fig.11 Drive mechanism of leg
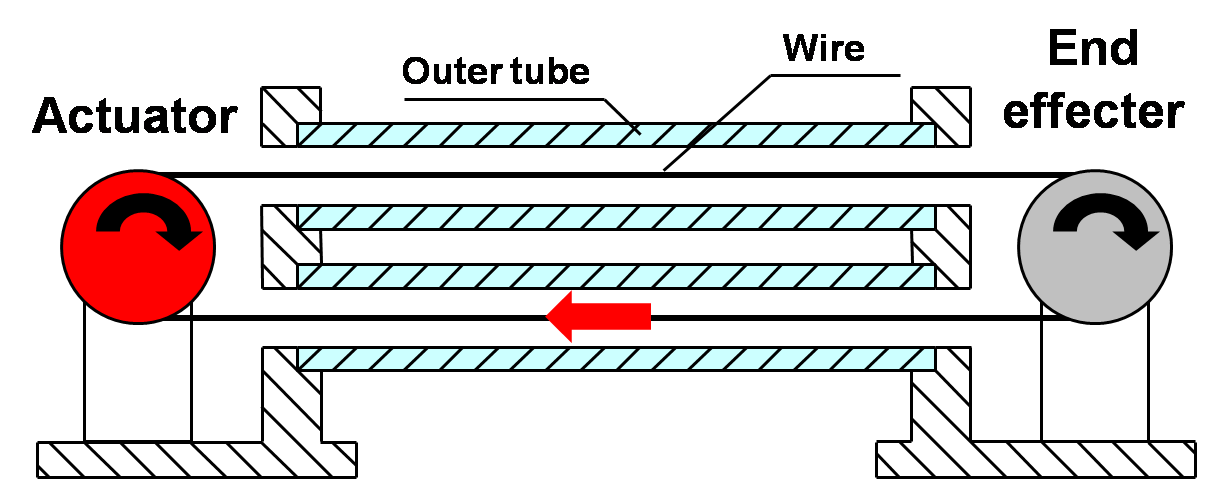
Fig.12 Antagonized wire driving mechanism
WR-2は脚関節のアクチュエータにDCモータを採用しています.小型化およびラットの脚の形状の模倣は,モータを全て胴体部に集めることで実現しています.動力の伝達には拮抗型ワイヤ駆動を採用し,力を各関節へ伝達する仕組みになっています.
拮抗型ワイヤ駆動とは,Fig.12のようにアクチュエータとエンドエフェクタの間にワイヤを往復させて動力を伝達する駆動方式です.この構造により,片方のワイヤは必ず引っ張りの状態になっているため,動力を伝達することができます.
(b) 頚部・腰部
頸部のPitch回転・腰部のPitch・Yaw回転はWR-1と同様RCサーボモータによって制御しています.頸部には小型サーボモータが直付けされており,頭部を上下に振る動きが可能です.腰部Pitch回転および腰部Yaw回転は,WR-2ではリンク機構を用いずに直接RCサーボモータで回転させています.
3. 制御系
WR-2にはマイクロコンピュ-ターSTM32とBluetooth通信モジュールが搭載されており,WR-1と同様に制御PCによって遠隔操縦されます.
4. モーションパターンの作成
各モーションパターンの作成にはWR-1と同様,本研究室で2002年に開発されたパターンジェネレータを使用しています.
5. 動作ムービー
WR-3(Waseda Rat No.3)
ラットとのインタラクション可能な脚・車輪ハイブリッド型アニマロイドWR-3の開発を行いました.脚は歩行モーションなどのインタラクションに用いて,車輪は移動に用います.WR-3は立ち上がり,首ふり,腰を曲げての旋回といったラットの行動を再現することができます.
1. 仕様
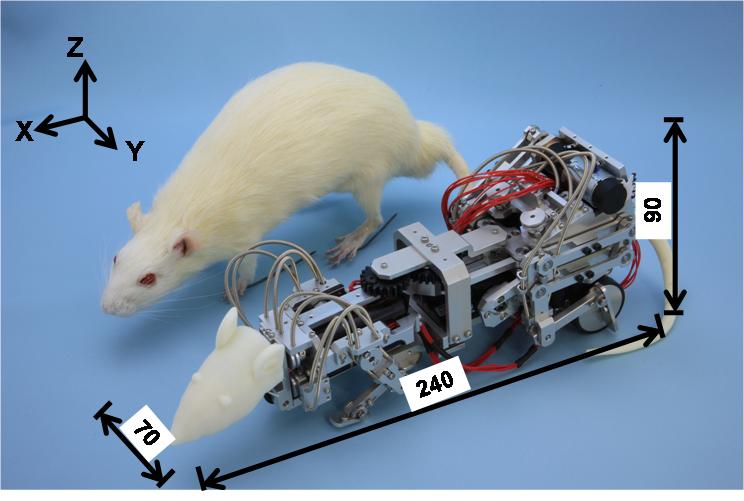
Fig.13 WR-3
| サイズ | 240 × 70 × 90 [mm] |
|---|---|
| 重量 | 1000[g] |
| 自由度 | 14-DOF (各脚×2,頸部×2,腰部×2,駆動部×2) |
| 電源 | Li-Polymer TP2100-2SPL 7.4[V]1320[mAh] |
2. 駆動機構
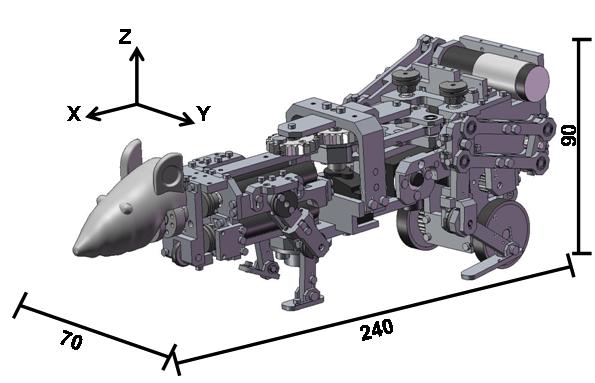
Fig.14 3D schematic view of WR-3
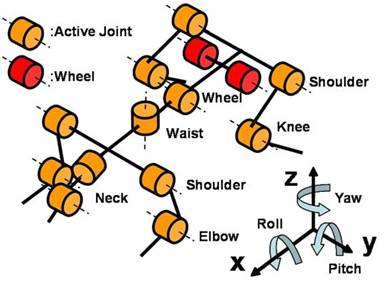
Fig.15 DOF configuration
(a) 脚部
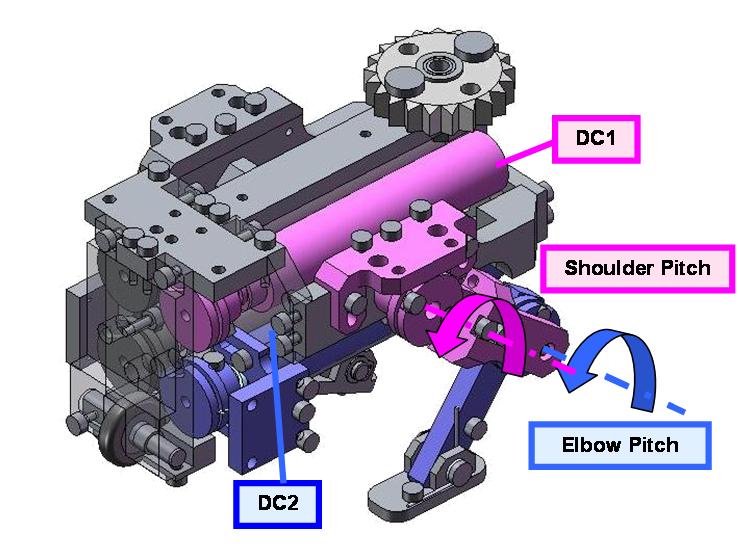
Fig.16 Drive mechanism of fore leg
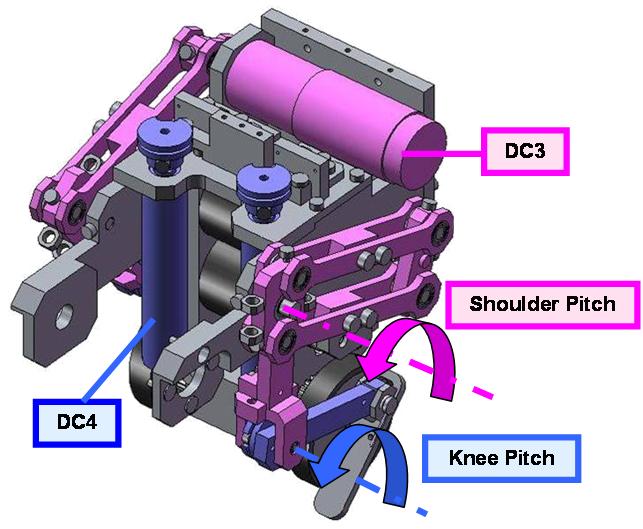
Fig.17 Drive mechanism of rear leg
WR-3は脚関節のアクチュエータにWR-2同様DCモータを採用しています.4足歩行は行わないので肩関節(Roll方向)の自由度はWR-2より1つ少なくなっています.前肢の機構はWR-2と同様で小型化を実現し,後肢はメンテナンス性や立ち上がり等のインタラクションで使用するために平行リンク機構を用いています.
(b) 頚部・腰部
頸部のPitch回転,Yaw回転には形状記憶合金とユニバーサルジョイントを用いて制御されます.腰部のPitch・Yaw回転はサーボモータによって制御されます.腰部のYawはFig.18に示す様に平行リンク機構と歯車が併用され,胴体をYaw方向に90度まで回転することが可能です.腰部のPitch方向には両端支持のサーボが使用され,アームリンクを介して胴体をFig.19のように持ち上げることが可能です.この自由度は主に立ち上がり動作を行う際に使用されます.
3. 制御系
WR-2にはマイクロコンピュ-ターSTM32とBluetooth通信モジュールが搭載されており,WR-2と同様に制御PCによって遠隔操縦されます.制御基板を2枚用いることで脚や車輪等の全自由度を制御しています.
4. モーションパターンの作成
歩行モーションや立ち上がりモーションは予め作成し,PCからの指令によって各々のモーションを行います.
5. 動作ムービー
WR-4(Waseda Rat No.4)
ラットとのインタラクション可能な脚・車輪ハイブリッド型アニマロイドWR-4の開発を行いました.
WR-4ではラットの腰部可動域の再現や運用性の向上を目的として各部機構の設計が行われました.
WR-4は立ち上がり,首ふり,腰を曲げての旋回といったラットの行動を再現することができます.
1. 仕様

Fig.20 WR-4
| サイズ | 270 × 70 × 90 [mm] ( バッテリー非搭載時 240×70×90[mm] ) |
|---|---|
| 重量 | 850[g] |
| 自由度 | 10-DOF (前肢2×2,頸部×1,腰部×2,駆動部×2,尾部×1) |
| 電源 | Li-Polymer TP2100-2SPL 7.4[V]1320[mAh] |
2. 駆動機構

Fig.21 3D schematic view of WR-3

Fig.22 DOF configuration
(a) 脚部

Fig.23 Drive mechanism of fore leg

Fig.24 Drive mechanism of rear leg
WR-4では,前肢機構の動力源として,直動型超音波アクチュエータを採用しています。
(b) 頚部・腰部

Fig.25 Neck Yaw Mechanism

Fig.26 Neck Yaw

Fig.27 Waist Mechanism

Fig.28 Waist Yaw

Fig.29 Waist Bending
頸部のYaw回転・腰部のPitch・Yaw回転はそれぞれ1軸のRCサーボモータによって制御されます.
頸部はFig.25のように4節リンク機構を採用し,頭から首の付け根にかけての連続的な屈曲を再現しています.
腰部はFig.27のように6つのリンク部と4つのスライドガイドから構成された6節クロスリンク機構となっており,
サーボモータの回転に対してこれらのリンクが追従し,Fig.29のような生物らしい多段屈曲を実現しています.
3. 制御系
WR-4にはマイクロコンピュ-ターSTM32とBluetooth通信モジュールが搭載されており, 制御PCによって遠隔操縦されます.
4. モーションパターンの作成
歩行モーションや立ち上がりモーションは予め作成し,PCからの指令によって各々のモーションを行います.
5. 動作ムービー
WR-5(Waseda Rat No.5)
ラットとのインタラクション可能な脚・車輪ハイブリッド型アニマロイドWR-5の開発を行いました.
WR-5では主に,腰部の可動域の向上・全体の小型化を目指して各部の設計を進めていきました.
WR-4と比較して,ラットの乗りかかり行動の再現を行っております.
1. 仕様

Fig.20 WR-5
| サイズ | 240 × 70 × 90 [mm] ( バッテリー非搭載時 210×70×90[mm] ) |
|---|---|
| 重量 | 700[g] |
| 自由度 | 13-DOF (前肢2×2,頸部×2,腰部×5,駆動部×2) |
| 電源 | Li-Polymer TP2100-3SPL 11.1[V]1320[mAh] |
2. 駆動機構

Fig.21 3D schematic view of WR-5

Fig.22 DOF configuration
(a) 頚部・腰部

Fig.25 Neck Yaw Mechanism
WR-5の腰部はラットの乗りかかりや毛づくろいなどの社会行動をX線透視動画で撮影し,解析を行い,
これを再現するのに必要な自由度・可動角を出してから設計を進めていきました.
腰部はFig.22のように2つのディファレンシャルギアモジュールから出来ており,yaw方向とpitch方向の回転を
を同軸上で行うことができます.
3. 制御系
WR-5にはマイクロコンピュ-ターSTM32とBluetooth通信モジュールが搭載されており, 制御PCによって遠隔操縦されます.
4. モーションパターンの作成
歩行モーションや立ち上がりモーションは予め作成し,PCからの指令によって各々のモーションを行います.