研究目的
研究目的
技術の進歩に伴い,ロボットはわれわれの生活に欠かせないものとなってきています.21世紀に入ってから,人間型ロボットが 次々と登場し,パーソナルロボットも身近なものになってきています.人間型ロボットだけに限らず,人間の心を癒すペット型ロボッ ト,人に代わって危険な作業や悪環境下で作業をする極限作業ロボット,手術や治療を行う医療ロボット,食事や患者のケアを行う看 護ロボット,宇宙空間で働くロボットなど,多くのロボットの活躍が家庭や現場で期待されています.
このような社会を目前にして,「人間とロボットの共生」というテーマについて研究することは,ますます重要となってきます.そ こで,私たちは「人間とロボットが共生するために必要な要素は何か?」ということを探しています.この「共生に必要な要素」を見 つけ出すには人間とロボットによる相互作用実験を行えば良いのですが,人間は先天的,後天的な要因により個体差が大きく,さらに 行動が複雑であるため,その心理状態を的確かつ定量的に把握することは困難です.技術的にもそのような実験を行うまでにはまだ時 間がかかると思われます.そこで本研究は「生物とロボットを実際に共生させる」ということに主眼を置き,人間より進化的に古く, 比較的行動が単純であるラットを用い,ラットとラット形ロボットによる相互作用実験を繰り返すことで,共生における効用と問題の 基本的枠組みを明らかにすることを目的としています.
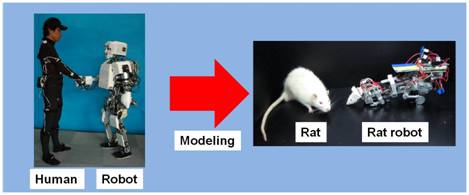
Fig. 1 Communication Between a Creature and a Robot
これまでの研究
| 1998年 |
|
|---|---|
| 1999年 |
|
| 2000年 |
|
| 2001年 |
|
| 2002年 |
|