Purpose
Research Purpose
Robots are recently growing popular with advances in
robotics. Therefore, requirements for robots are changing.
Industrial robots can operate with high accuracy and
repeatability. However, operating these robots is difficult
for people without technical knowledge or skill. Therefore,
personal robots that are easy for anyone, even older people,
to operate are anticipated. It is necessary for personal
robots to have new functions to live symbiotically with
humans. We then clarify the basic factors necessary for a
symbiotic relationship between humans and robots.A lot of research has been conducted on robots with human-like faces that can communicate with humans. We can easily operate robots through communication. Some researchers have studied robot-assisted therapy, which has been evaluated according to questionnaire data. However, evaluating human-robot interaction is difficult due to a number of uncertain factors in human communication and the variety of personalities.
Therefore, as a first step, we have been studying interaction between rats, less sophisticated animals, and robots. We clarify basic factors necessary for a symbiotic relationship between rats and robots based on animal psychology, which has contributed to clarifying human psychology. We then have been conducting interaction experiments between rats and robots. We hope our studies contribute, as well as animal psychology, to clarifying the factors necessary for the symbiosis between humans and robots.
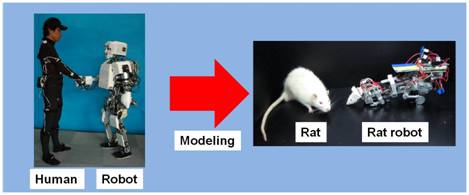
Fig. 1 Communication Between a Creature and a Robot
Previous Research
| 1998 |
|
|---|---|
| 1999 |
|
| 2000 |
|
| 2001 |
|
| 2002 |
|