Robot-WR
WR-1(Waseda Rat No.1)
We aim to develop a novel experimental system where rat's sociality is evaluated through interaction with a robot. Therefore we developed a quadruped animaloid WR-1. This robot reproduces interbehavior of rats such as rearing or neck appearance.
1.Specification
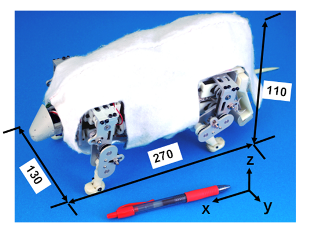
Fig.1 WR-1
| Size | 270 × 130 × 110 [mm] |
|---|---|
| Weight | 1150[g] |
| DOF | 15-DOF (Each legs×3,Neck×1,Weight×2) |
| Battery | Li-Polymer TP2100-2SPL 7.4[V]2100[mAh] |
2.Drive Mechanism
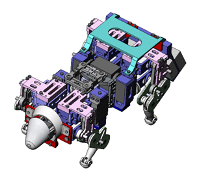
Fig.2 3D schematic view of WR-1
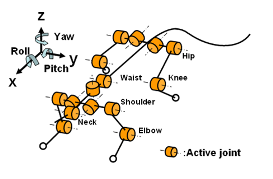
Fig.3 DOF configuration
(a) Leg
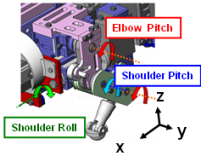
Fig.4 Drive mechanism of leg
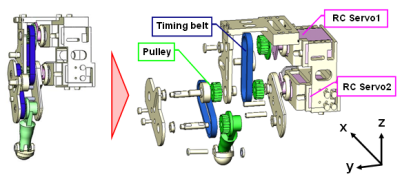
Fig.5 Exploded view
We made composition of the leg itself small by not arranging a motor directly at each joint from point of imitation of real rats' leg , but bringing all motors together in a body part since the servo motor is used for the actuator of each joint. Also using a timing belt and a belt pulley , the power is transmitted to each joint. Performing Pitch rotation of Shoulder (Hip) of a leg by using a lower servo motor, and using a timing belt two steps by an upper motor, Elbow Pitch rotation of (Knee) is performed.
(b) Neck・Waist
Pitch of Neck is used for small servo motor. Owing to this DOF, WR-1 reproduced Neck appearance. A parallel link mechanism is used together to show Yaw of waist in Fig.6, and the Yaw direction can turn with the body. Servo motor is used for Pitch of waist and can lift the body like Fig.7 with an arm link. This DOF is mainly used for rearing.
3.Control System
Microcomputer
(dsPIC) and Bluetooth communication module are implemented
in WR-1, and it is steered remoteness by a control PC.
WR-1
read the angle data of each joint of chronological order
generated in offline just before the robot move, and an
order is sent to dsPIC through Bluetooth by a PC. A
control order is sent to a servo motor used in each joint.
4.Pattern Generation
We used pattern generator which developed in takanishi laboratory in 2002 to make each motion pattern. First we set some parameter which are necessary for the moment amends orbit calculation. Next,we actually calculate the moment amends orbit. We performe Inverse-kinematics calculation and get the angle data of the time series for all joints for the angle of each joint, and output those as one motion pattern at the end .
5.Movie
WR-2(Waseda Rat No.2)
We improved a quadruped animaloid WR-1,and developed a quadruped animaloid WR-2. We achieved downsizing and lightening to imitate rat's shape.
1. Configuration
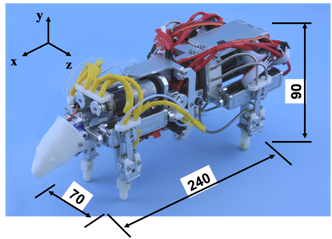
Fig.8 WR-2
| Size |
240 × 70 × 90 [mm] |
|---|---|
| Weight | 850[g] |
| DOF | 15-DOF (Each leg×3,Neck×1,Waist×2) |
| Battery | Li-Polymer TP2100-2SPL 7.4[V]1320[mAh] |
2. Drive System
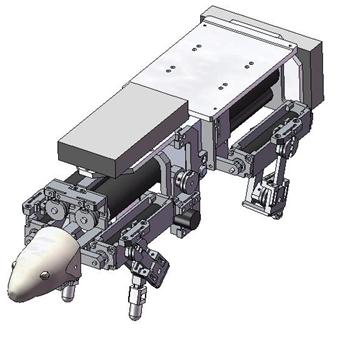
Fig.9 3D schematic view of WR-2
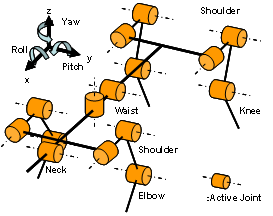
Fig.10 DOF configuration
(a) Leg
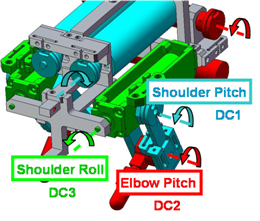
Fig.11 Drive mechanism of leg
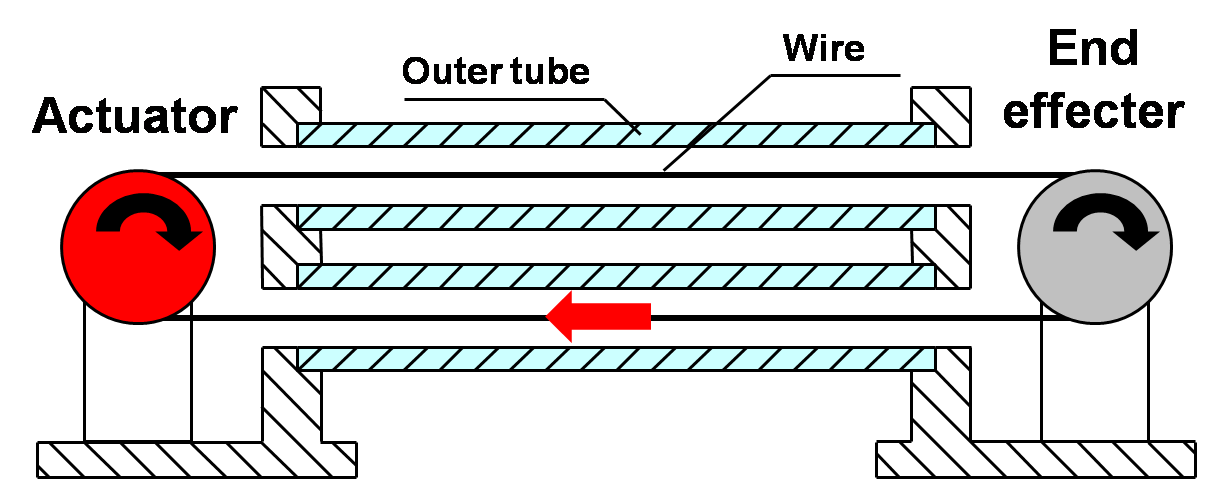
Fig.12 Antagonized wire driving mechanism
DCmotors is used for the actuator of each joint of WR-2's leg. Bringing all DC motors together in a body part, We achieved to imitate rat's shape. To transmit torque and motion, we used antagonized wire driving system for shoulder pitch and elbow pitch.(Fig.11,Fig.12)
(b) Neck・Waist
Pitch of Neck, Pitch of waist and Yaw of waist is used for RC servo motor as well as WR-1's. Pitch of Neck is used for small servo motor. Owing to this DOF, WR-1 reproduced Neck appearance. Pitch of waist and Yaw of waist is actuated directly by RC servo motors.
3. Control System
Microcomputer (STM32) and Bluetooth communication module are implemented in WR-2, and it is steered remoteness by a control PC as well as WR-1.
4. Pattern Generation
We used pattern generator which developed in takanishi laboratory in 2002 to make each motion pattern as well as WR-1.
5. Movie
WR-3(Waseda Rat No.3)
We developed leg-wheel hybrid animaloid WR-3 which was interaction with rat. WR-3 uses the leg for the interactions and uses the wheel for movement. WR-3 can reproduce the action of the rat such as the bending a waist, waving a neck and rearing.
1. Configuration
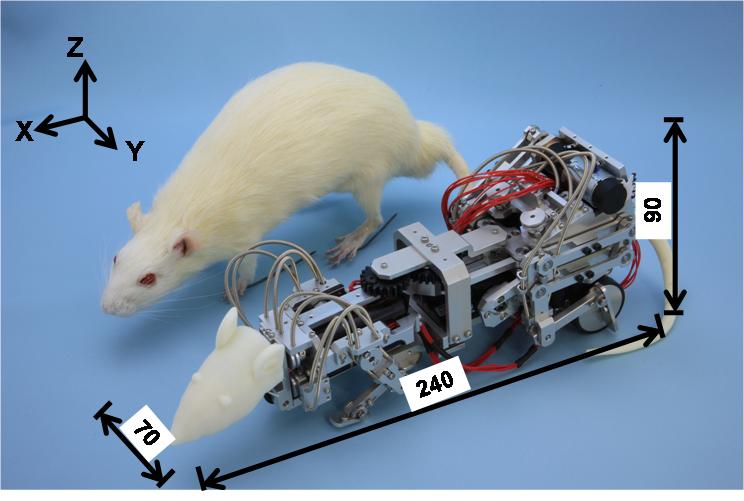
Fig.13 WR-3
| Size | 240 × 70 × 90 [mm] |
|---|---|
| weight | 1000[g] |
| DOF | 14-DOF (Each legs×2,Neck×2,Weight×2,Wheel×2) |
| Battery | Li-Polymer TP2100-2SPL 7.4[V]1320[mAh] |
2. Drive System
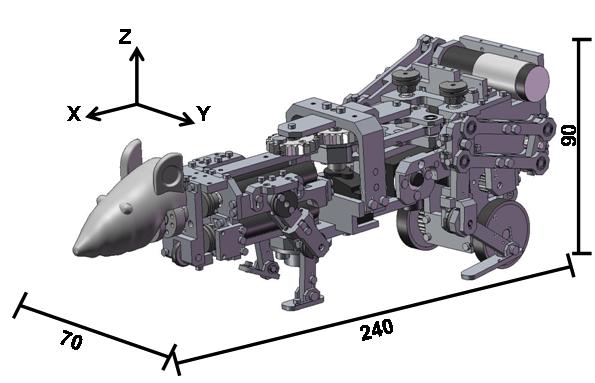
Fig.14 3D schematic view of WR-3
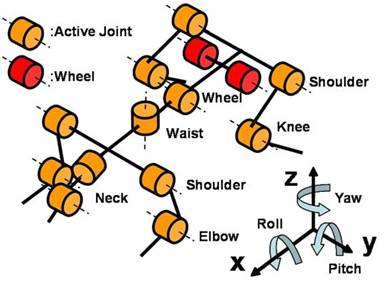
Fig.15 DOF configuration
(a) Leg
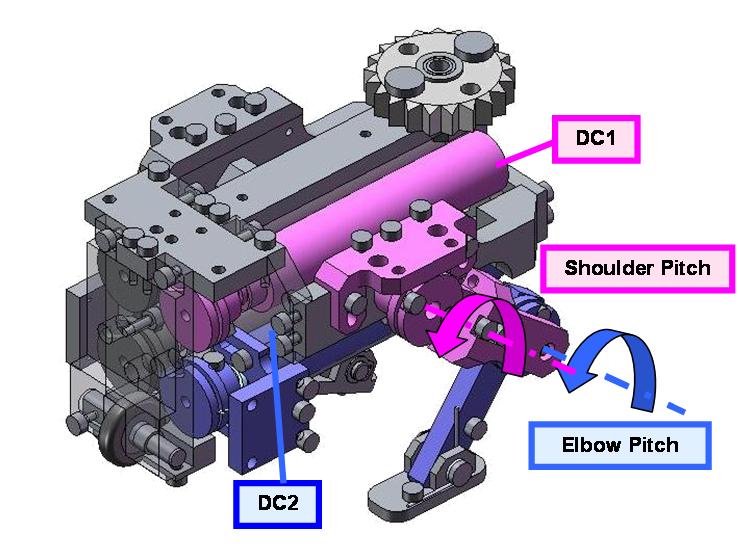
Fig.16 Drive mechanism of fore leg
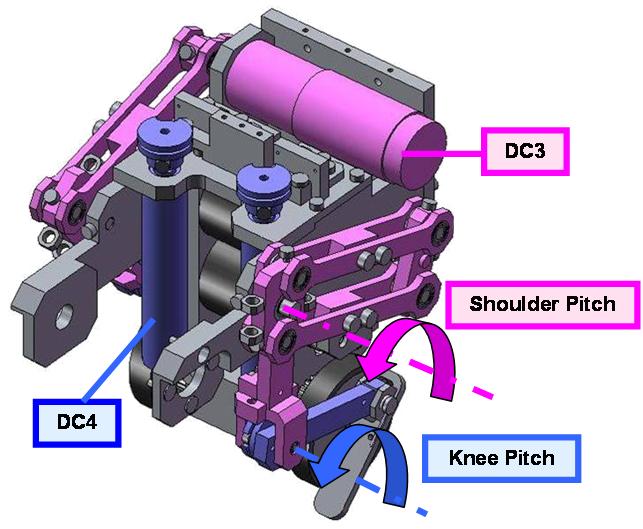
Fig.17 Drive mechanism of rear leg
WR-3 adopts a DC motor to the actuator of the leg joint. WR-3 don't walk and WR-3's shoulder joint DOF(roll direction) is more little than WR-2's DOF. The fore leg mechanisms is smaller the same as WR-2, the rear legs use a parallel link mechanism to the interactions such as a rearing and a maintenance characteristics.
(b) Neck・Waist
Pitch of neck and Yaw of neck is used with a universal joint and a SMA(shape memory alloy). Pitch of waist and Yaw of waist is controlled by a servo motor. As for Yaw of waist, a gear is used together with a parallel link mechanism. And Yaw of waist angle is able to increase rotated angle by adjusting the gear ratio(Fig.18). Pitch of waist is used for rearing only in a pitch direction.
3. Control System
Microcomputer (STM32) and Bluetooth communication module are implemented in WR-3, and it is steered remoteness by a control PC as well as WR-2.We control total freedom by using two control boards.
4. Pattern Generation
We make the motion beforehand in a walk motion and a rear motion, and perform by PC.
5. Movie
WR-4(Waseda Rat No.4)
Aiming at increased movement range of the waist and
improved interoperability,
we have developed a novel small animaloid robot WR-4.
1. Configuration

Fig.20 WR-4
| Size | 270 × 70 × 90 [mm] ( No Battery 240×70×90[mm] ) |
|---|---|
| Weight | 850[g] |
| DOF | 10-DOF (Foreleg2×2,Neck×1,Waist×2,Wheel×2,Tail×1) |
| Battery | Li-Polymer TP2100-2SPL 7.4[V]1320[mAh] |
2. Drive System

Fig.21 3D schematic view of WR-4

Fig.22 DOF configuration
(a) Legs

Fig.23 Drive mechanism of fore leg

Fig.24 Drive mechanism of rear leg
Actions of the forelegs are achieved by using slider crank mechanism drived by Linear Ultra-Sonic Motor(USM).
(b) Neck・Waist

Fig.25 Neck Yaw Mechanism

Fig.26 Neck Yaw

Fig.27 Waist Mechanism

Fig.28 Waist Yaw

Fig.29 Waist Bending
One DOF in the Yaw axis is arranged to
achieve the neck rotation drived by one easily controlled
servo motor.
As shown in Fig.25, the adoption of 4-bar linkage mechanism
in the neck, makes WR-4 able to mimic the curved posture of
rats when bending neck .
The waist of WR-4 configured with 2 DOFs is actuated by
servo motors: one DOF around pitch axis serves as the driver
for acting rearing behavior, the other one around yaw axis
serves as a drive axle of the multi-bendable 6-bar linkage
mechanism. Based on the mechanical geometry and design view
of the waist endowed with the 6-bar linkage mechanism
illustrated in Fig.27/28.
3. Control System
WR-4 is controlled by a PC via wireless communication with microcontroller STM32F103ZE6T manufactured by STMicroelectronics company.
4. Pattern Generator
We make the motion beforehand in a walk motion and a rear motion, and perform by PC.
5. Movie
WR-5(Waseda Rat No.5)
We developed leg-wheel hybrid animaloid WR-3 which was interaction with rat.
Aiming at performing mounting action of rat ,in addition, incresing waist movement and downsizing.
1. Configuration

Fig.20 WR-5
| Size | 240 × 70 × 90 [mm] ( No Battery 210×70×90[mm] ) |
|---|---|
| Weight | 700[g] |
| DOF | 13-DOF (Foreleg2×2,Neck×2,Waist×5,Wheel×2) |
| Battery | Li-Polymer TP2100-3SPL 11.1[V]1320[mAh] |
2. Drive System

Fig.21 3D schematic view of WR-5

Fig.22 DOF configuration
(a) Waist

Fig.25 Neck Yaw Mechanism
Waist of WR-5 is designed by X ray motion image of rat behavior.
We took the photograpf of X ray motion image of rat behavior, and made the kinematic model of waist.
3. Control System
WR-5 is controlled by a PC via wireless communication with microcontroller STM32F103ZE6T manufactured by STMicroelectronics company.
4. Pattern Generator
We make the motion beforehand in a walk motion and a rear motion, and perform by PC.