実験(実験装置)
実験装置
開発した実験装置をFig .1に示します.
ラットとロボットによるインタラクション実験は「オープンフィールド」と呼ばれる正方形の箱状の装置の中で行っています.オープンフィールドとは,動物の行動計測等を行うための実験装置で,心理学の分野においても古くから使用されています.
実験フィールドには,図のように「水供給装置」,「餌供給装置」,「立上りセンサ」,「振動取得センサ」,「電池交換装置」が配置されており.上部2mの位置に全体映像取得用の「定点カメラ」と局所映像取得用「追従カメラ」の2つのCCDカメラが設置されています.
以下に,各装置の詳細を示します.
Fig1.Experimental Setup
実験フィールド
| Fig.2 Food Feeder |
餌供給装置はPICマイコンとステッピングモータより構成されています.この装置は1回の動作でミルクペレット1個を実験フィールド内の餌皿に提示します.また餌供給のタイミングは制御PCによって制御しています. |
| Fig.3 Water Feeder |
水供給装置はPICマイコンとサーボモータより構成されています.この装置は1回の動作で水飲み口を3秒間実験フィールド内に提示します.この間ラットは自由に採水することが可能となります.また水飲み口提示のタイミングは制御PCによって制御しています. |
| Fig.4 Battery Exchanger |
電池交換装置は電池吸着用の電磁石,2自由度ロボットアームおよび充電器より構成されています.この装置によりWM-6は実験中に電池交換することが可能です.WM-6は搭載している電池の残量が低下すると,電池交換装置の前に移動し,電池交換装置はアームの先端の電磁石によってWM-6上の電池を取り外し,充電器で充電された電池と交換します. |
| Fig.5 Tracking Camera |
追従カメラは,拡大レンズつき小型カメラと,それを駆動する2自由度の台座から構成されます.拡大レンズ付きカメラには焦点距離16[mm]の拡大レンズが取り付けられており,オープンフィールド内の局所領域を定点カメラより高解像度で撮影することが可能です.また,定点式カメラによって撮影された画像からラットの位置を算出し,その値に基づいてこのカメラをラットを追従するよう制御することで,常にラットを撮影し続けることが可能です. |
| Fig.6 Grooming Sensor |
毛づくろいセンサは200[mm]四方のアルミ板ステージ,それを支える片持ち梁と台座より構成されます.片持ち梁にはひずみゲージが取り付けられており,ステージの振動を電気信号に変換します.その後,制御PCに値を取り込み,得られた値にFFT解析を行い,振動に含まれる周波数成分から毛づくろいを判定します. |
| Fig.7 Rearing Sensor |
立ち上がりセンサはPICマイコンと壁面に埋め込まれた30組のフォトセンサ(赤外線LED&赤外線フォトトランジスタ)より構成されます.フォトセンサは床より高さ110[mm]のところに取り付けられており,ラットが立ち上がった際に赤外線ビームが遮断されることにより立ち上がりを検知します. |
実験システムの構成
実験システムの構成をFig.8に示します.実験装置は,ラットとの「刺激提示装置」と「行動計測装置」に分類できます.
まず,「刺激提示装置」には,「餌供給装置」,「水供給装置」,「電池交換装置」が挙げられます.これらの装置は,Bluetoothという無線通信機器により制御PCと通信を行っており,制御PCからの指令により動作します.
また,「行動計測装置」には,「立上りセンサ」,「振動取得センサ」,「CCDカメラ」が挙げられます.「立上りセンサ」,「振動取得センサ」は上記の装置同様,制御PCとの通信を行っており,計測結果を制御PCに送信します.またCCDカメラの映像は画像処理ボードを用いて,制御PCにて画像処理を行っております.
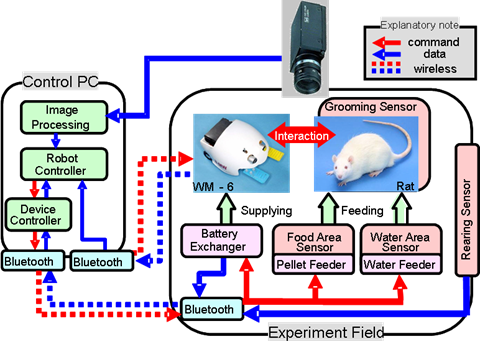
Fig.8 Experimental System
制御PC
制御PCは画像処理ボードを搭載しており,フィールド上部のCCDカメラからの映像を受信します.また,Bluetooth通信モジュールが2個接続されており,WM-6および実験装置との双方向通信を行っています.制御ソフトは画像処理部,動作生成部,ロボット制御部,装置制御部から構成されており,実験者の操作を必要とせずWM-6と実験装置の自動制御が可能となっています.
画像処理部ではCCDカメラからの映像に画像処理を行い,ラットとロボットの重心点の座標を算出しています(Fig .9).
動作生成部にはWM-6および実験装置の動作パターンが記述されています.この動作パターンとにもとづき,画像処理部で得られたラットとロボットの位置と,ロボットの状態に応じて実験装置の動作指令とロボットの経路生成がなされます.
ロボット制御部では動作生成部で生成された経路にもとづき,ビジュアルフィードバックによりWM-6の移動を制御します.ここでは,目標地点までの距離と角度からWM-6の左右両輪の速度を決定し,ロボットに指令を送ります.また,ロボットから送られてくるデータより,電池電圧およびレバーの状態を判断しています.
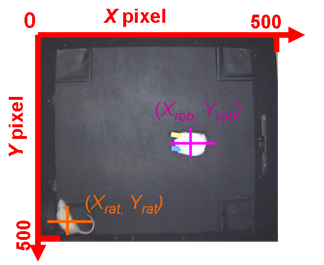
Fig.9 Image Processing