ガス管検査ロボット WATERシリーズ

管内移動ロボット
概要
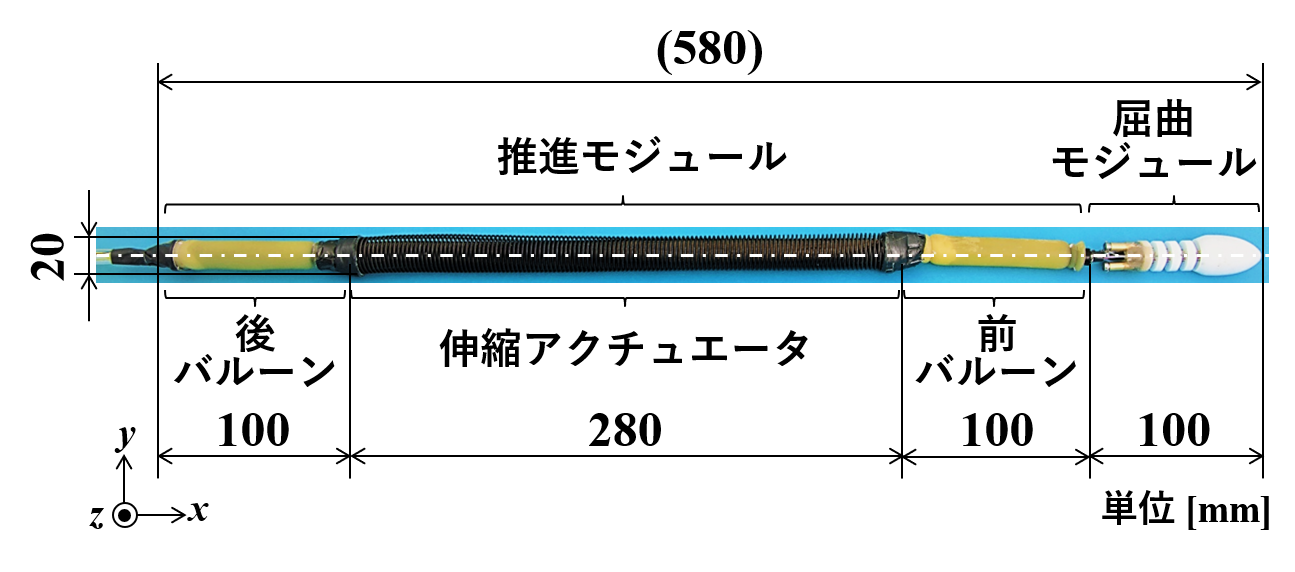
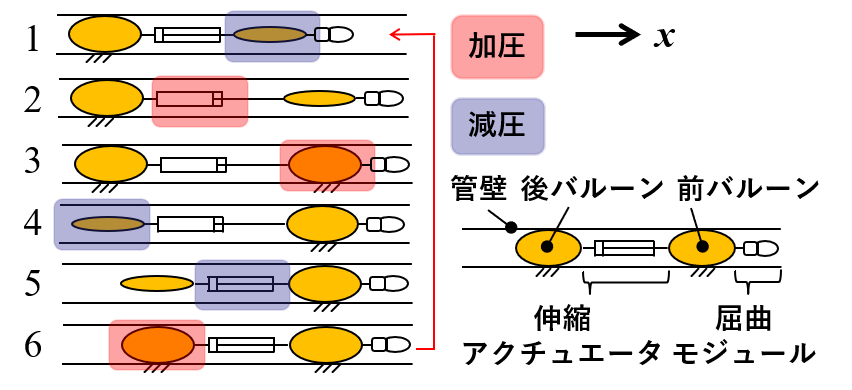
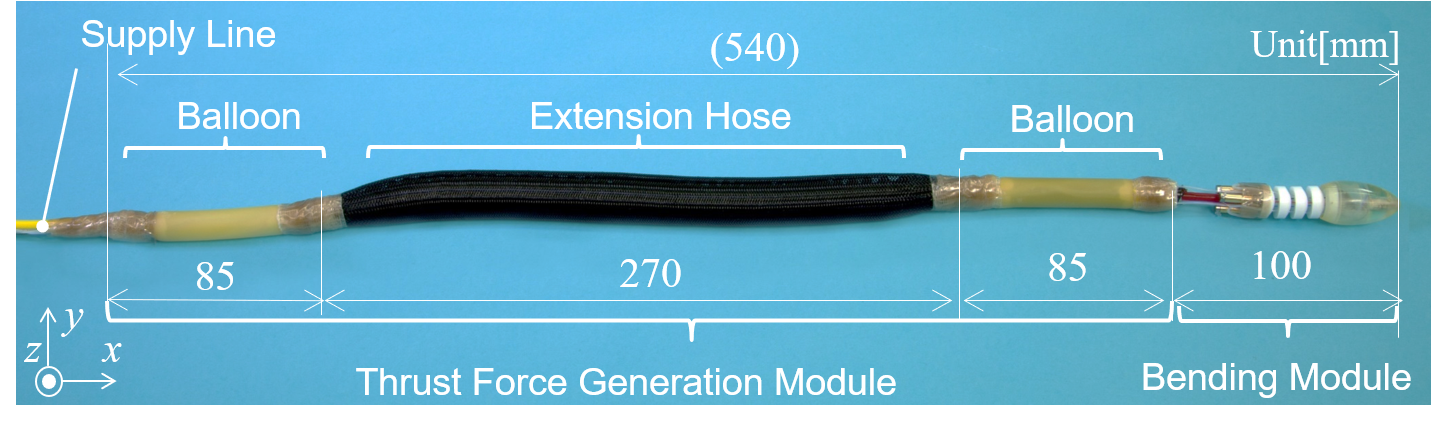
本ロボットは,内圧の変化により伸縮する伸長ホースとその前後2つのバルーンにより構成され,尺取り虫のように推進します. ロボット前方には,空気圧駆動の屈曲モジュールとカメラを搭載しています. 内径28[mm]と53[mm]の直線配管の水平・垂直面内走行や,内径28[mm]で8箇所の湾曲部のある配管の通過,内径53[mm]の湾曲部の通過・撤収が可能です.
ロボットシステム
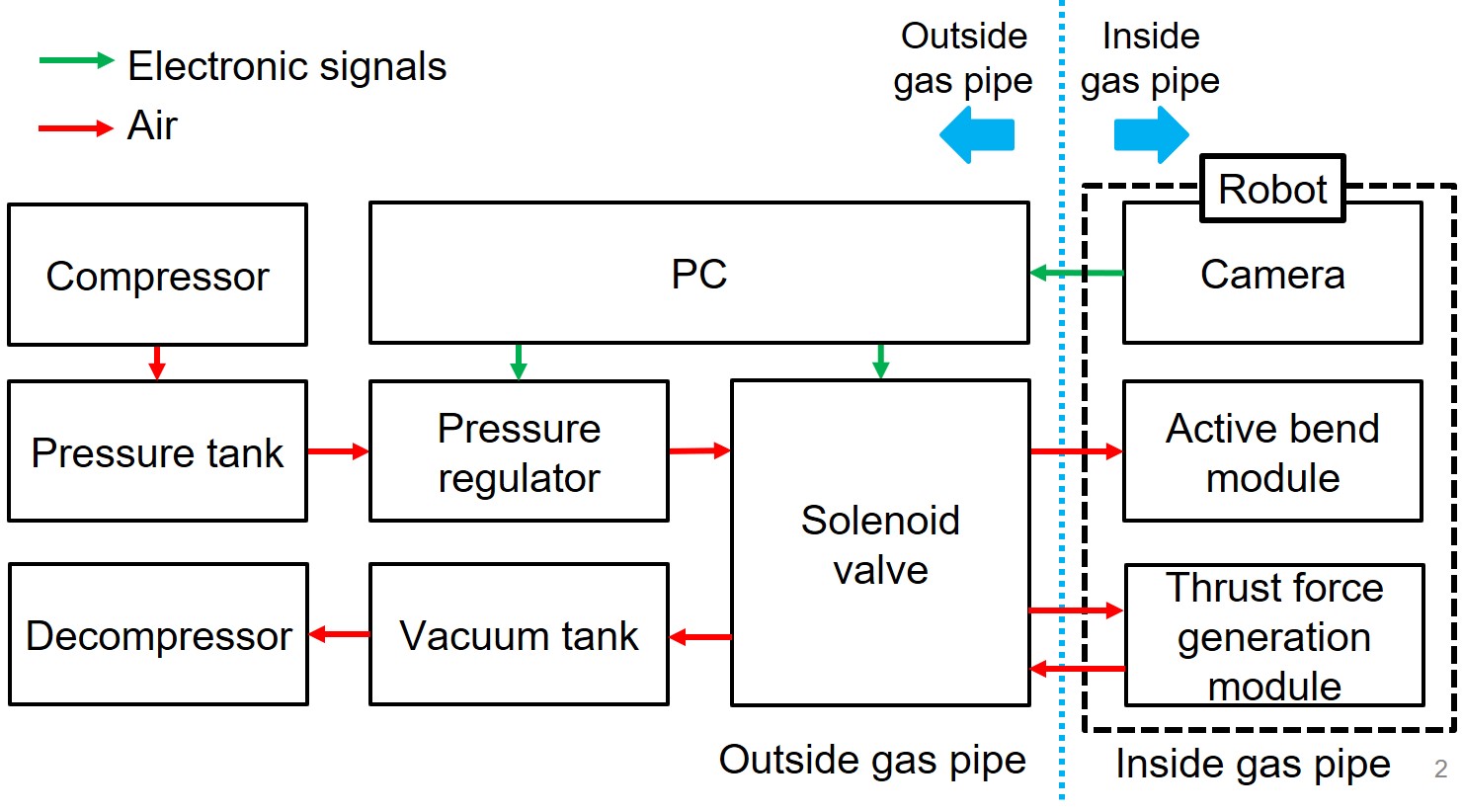
ロボットにはカメラ,屈曲モジュール,推進モジュールが搭載されており,それぞれ通信ケーブルと送気チューブによって地上の装置と接続されています. 地上にはロボットの空気圧モジュールを制御する空圧機器と操作用のPCがあり,カメラの映像を見ながらロボットの操作が可能となっています.
研究内容
WATER-6 (2020)
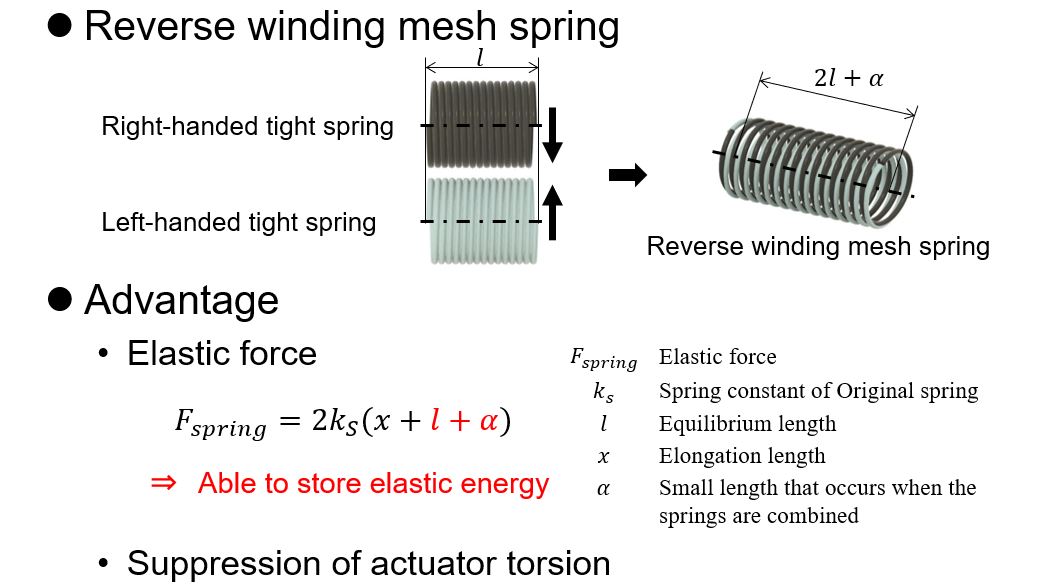
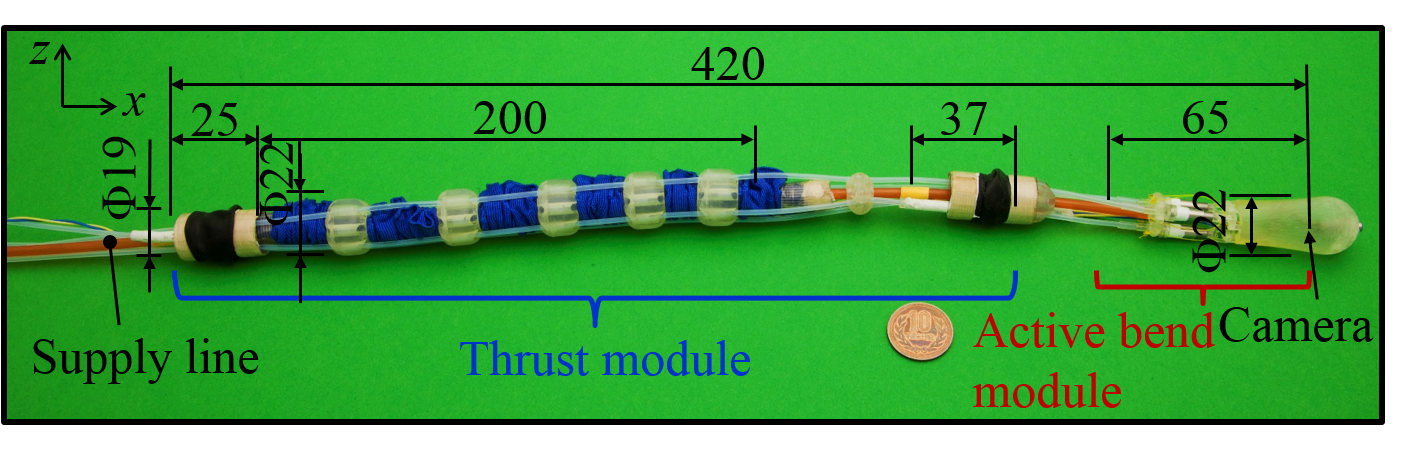
WATER-5は想定配管における全ての湾曲部の通過・撤収が可能ですが,ガス配管深部での走行が不可能でした. そこで,実際のガス管内検査を想定しガス配管深部50[m]地点にて走行可能なロボットWATER-6の開発を行いました. WATER-6は,伸縮アクチュエータに右巻きのバネと左巻きのバネを交互に噛み合わせた逆巻き噛合バネを組み込むことで, 鋼管内で76 [N]の牽引力を発揮しながら走行ができるようになりました. このロボットに実際のガス配管を模した8つの湾曲部を含む50 [m]の配管を走行させたところ, ガス配管の深部 50 [m]地点において80 [m]の送気用チューブを牽引しながら走行できることが確認できました.
ガス配管深部50 [m]地点で約80 [m]の送気チューブを牽引しながら走行するWATER-6 (16倍速)
[関連論文]
小西瑶果,先﨑翔太郎,中村蒼子,児玉理,清水智壮,大貫彰彦,前田亮,石井裕之,高西淳夫
”ガス管本支管深部での走行が可能な空気圧駆動型管内移動ロボットの開発”,第39回日本ロボット学会学術講演会, 2j3-02,オンライン,2021年9月
Satoshi Kodama,Yoka Konishi,Koki Shindo,Shotaro Senzaki,Toko Nakamura,Akihiko Ohnuki,Minoru
Konno,Hiroyuki Isii,Atsuo Takanishi, "Development of Pneumatic Driven Robot System which can Entry and
Retire from Gas Pipe," 2021 IEEE International Conference on Mechatronics and Automation (ICMA), 2021, pp.
1466-1471, doi: 10.1109/ICMA52036.2021.9512655.
WATER-5 (2019)
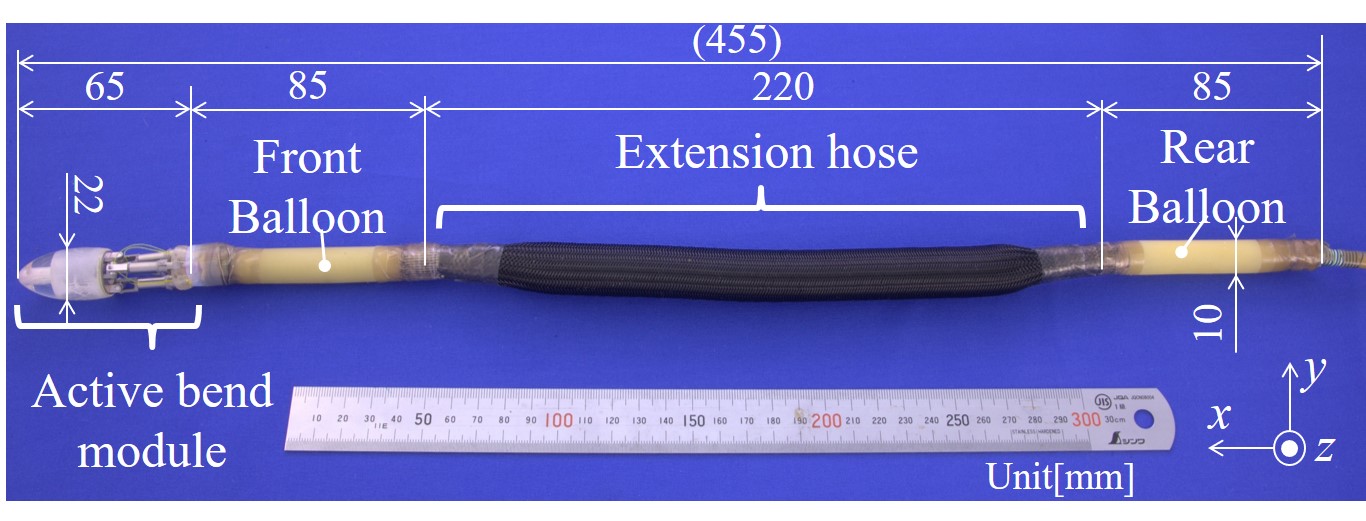
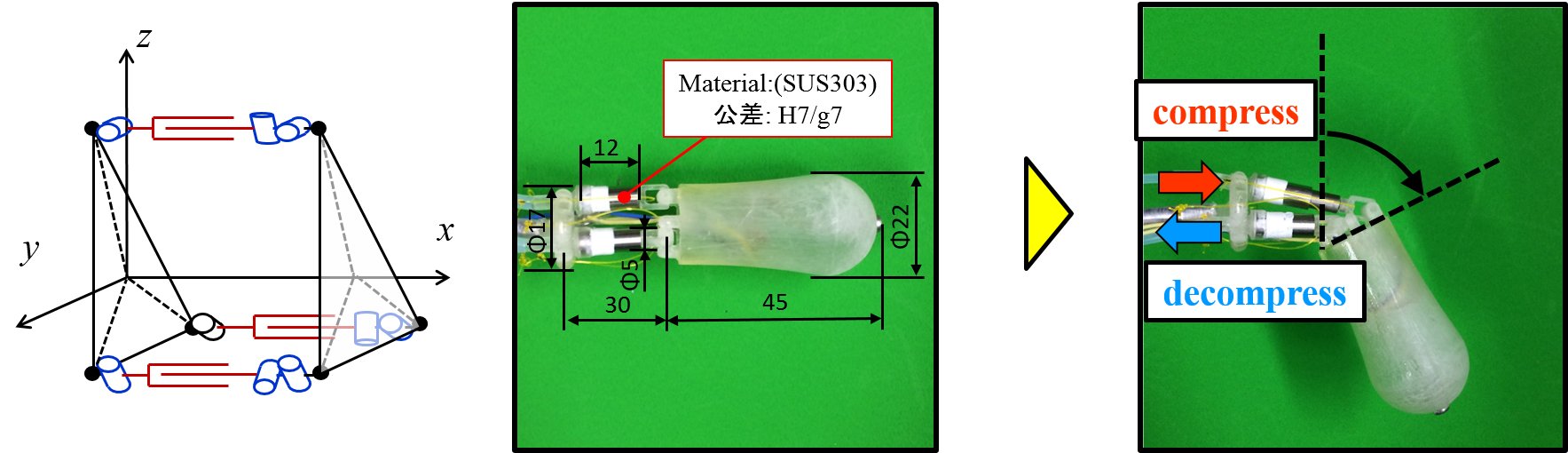
WATER-4には本支管からの撤収に時間がかかり,成功率が低いという問題がありました. WATER-5はWATER-4をベースに,本支管までの各湾曲部の進入に加え,進入後の撤収を可能にしたロボットです. 新たに開発した劣駆動型の能動屈曲モジュールを搭載することで,本支管からの撤収が可能になりました. また,屈曲角度も84[deg]と従来より向上し,湾曲部への進入も容易になりました.
[関連論文]
児玉理,先﨑翔太郎,中村蒼子,真藤幸暉,今野実,大貫彰彦,高西淳夫,石井裕之,
”ガス管本支管への進入および撤収が可能な空気圧駆動型管内移動ロボットの開発”,第38回日本ロボット学会学術講演会, 3A1-01,オンライン,2020年10月
Satoshi Kodama,Yoka Konishi,Koki Shindo,Shotaro Senzaki,Toko Nakamura,Akihiko Ohnuki,Minoru
Konno,Hiroyuki Isii,Atsuo Takanishi, "Development of Pneumatic Driven Robot System which can Entry and
Retire from Gas Pipe,"
2021 IEEE International Conference on Mechatronics and Automation (ICMA), 2021, pp. 1466-1471, doi:
10.1109/ICMA52036.2021.9512655.
WATER-4 (2018)
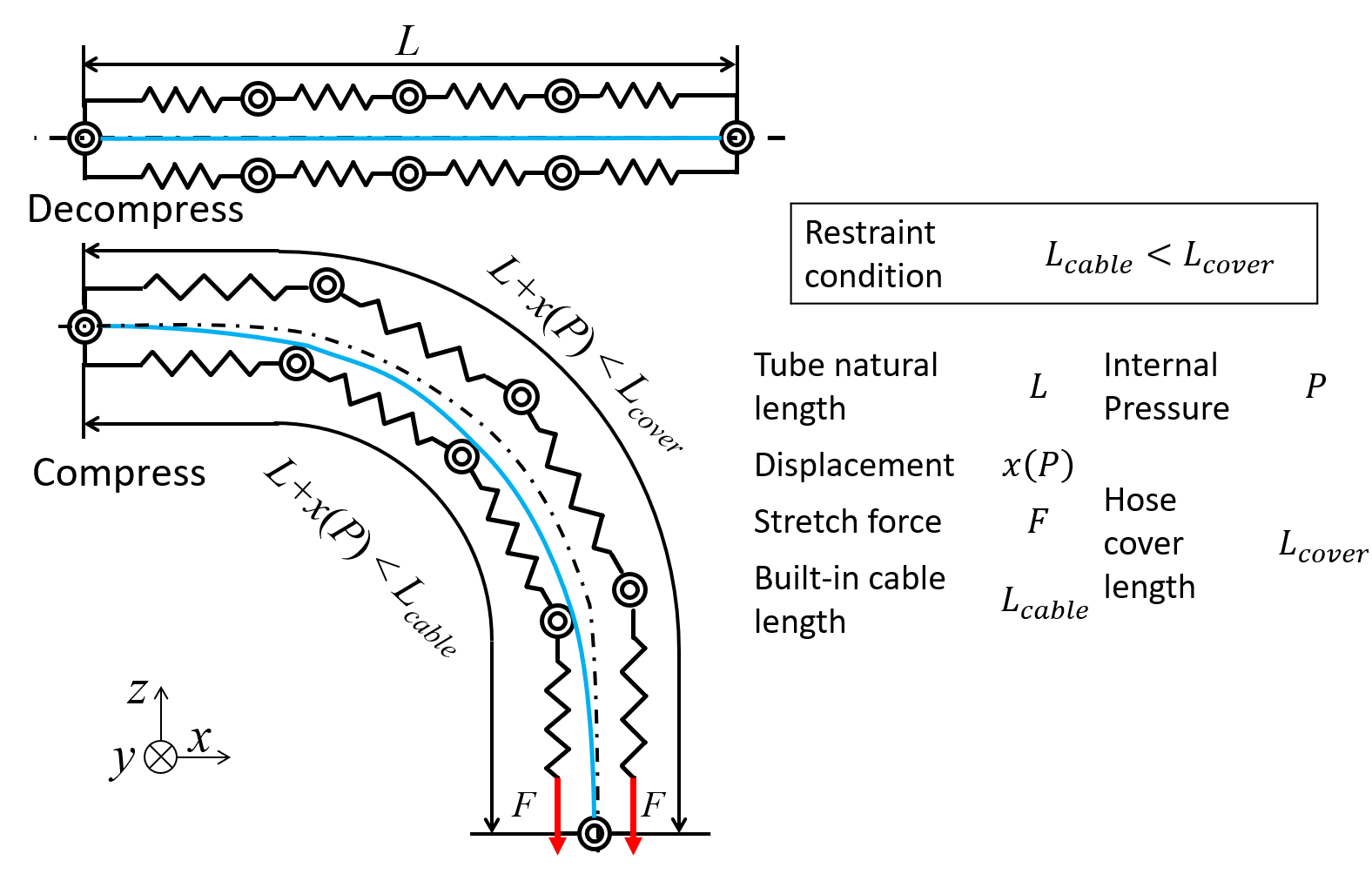
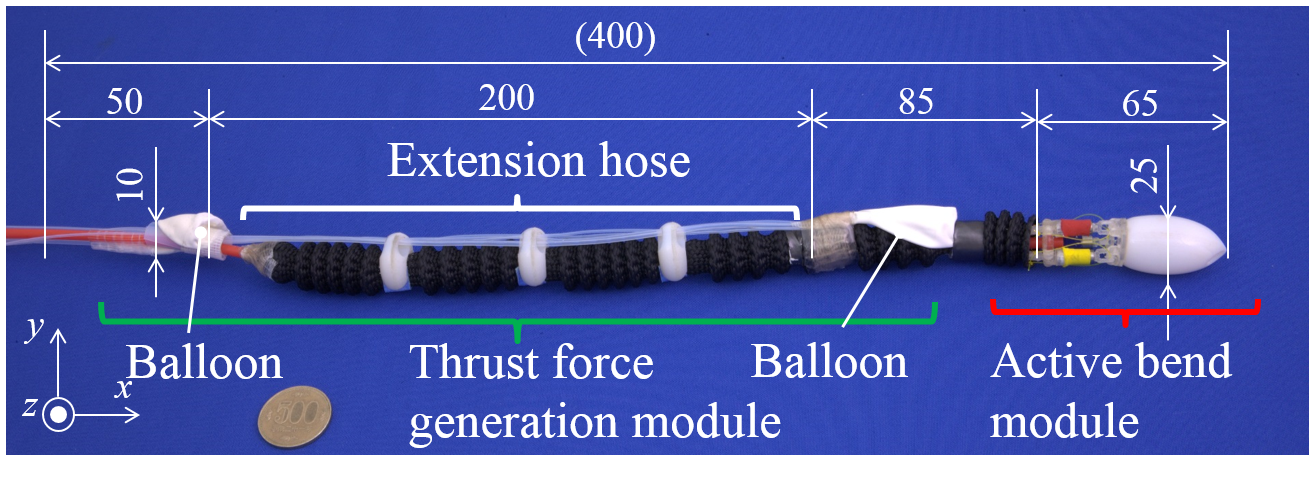
WATER-3では径違いチーズと伏越・横振を含む本支管走行が不可能でした. そこで径違いチーズ・50A伏越・横振の進入撤収を目標とし,本支管進入・湾曲部通過が可能にしたロボットWATER-4を開発しました. WATER-3の伸長ホースの内部に伸長ホースより短いケーブルを内蔵し,湾曲した状態での伸長を可能にすることで,湾曲部での管壁の摩擦力を低減し,これらの問題を解決しました.
[関連論文]
先﨑翔太郎,中村蒼子,真藤幸暉,吉本昂平,今野実,大貫彰彦,高西淳夫,石井裕之,”50A管湾曲部への進入および撤収が可能な管内移動ロボットの設計・製作”,第37回日本ロボット学会学術講演会,
1I2-05, 東京都, 2019年9月
WATER-3 (2017)
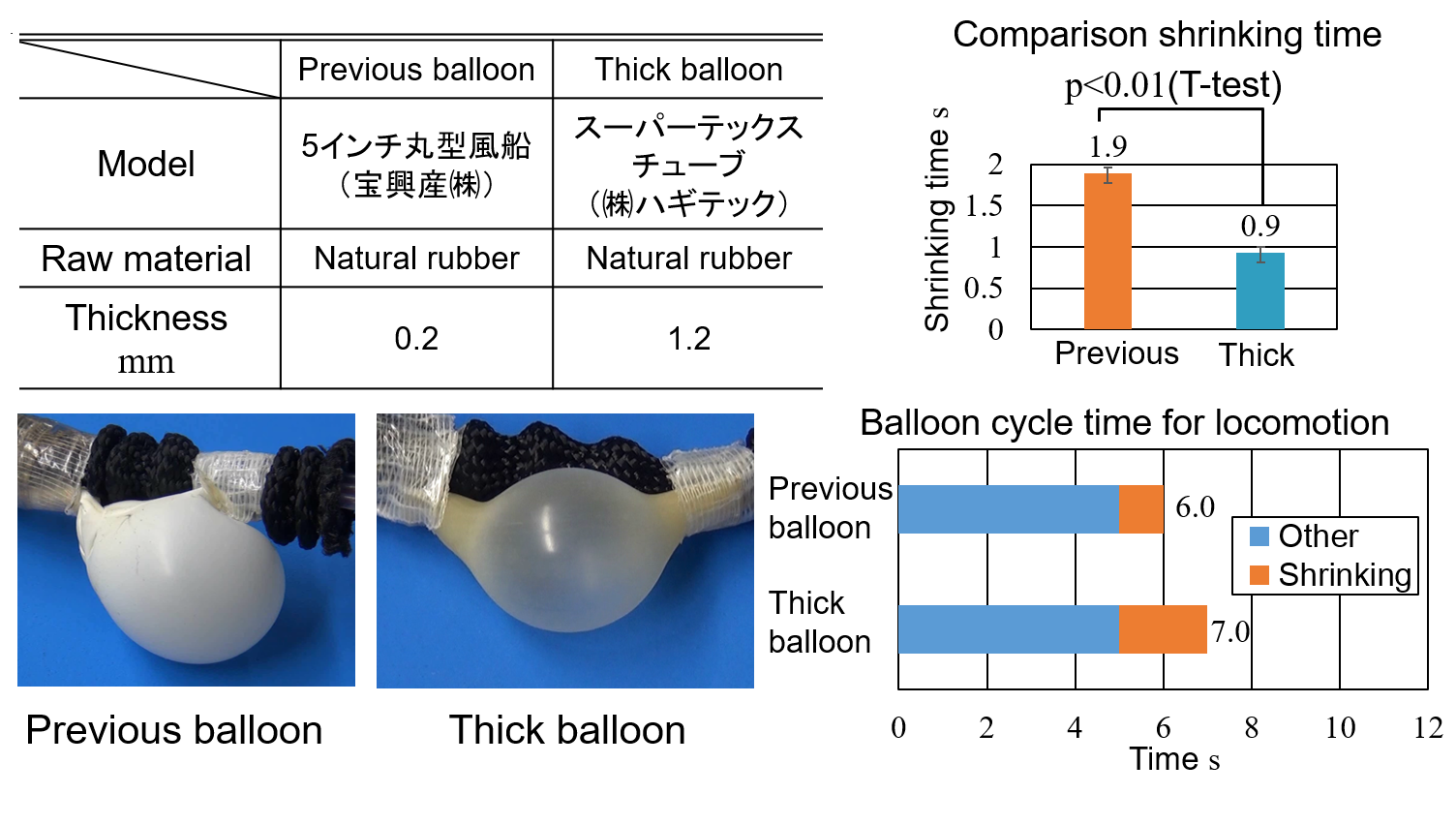
WATER-2では透明管で構成された模擬8曲がり管の通過が可能でしたが,目標作業時間に対してロボットの速度が遅いという問題点がありました.そこでWATER-3では,透明模擬8曲がり管の通過時間を10[min]に短縮することを目標として開発を行いました.
バルーンの素材に厚みと収縮力の大きい天然ゴムチューブを採用することで,推進サイクルを約14%削減しました.また,高圧を使用した走行ではT字管の垂直な部分に勢いよく衝突すると破損してしまうため,進入時に走行速度を落とす必要がありました.切削加工による金属製屈曲モジュールを製作することで破損しなくなり,速度を落とさずにT字管に進入できるようになりました.
開発したロボットと新たに開発したチューブ押し出し装置を併用することで,平均通過時間は16分,最速で10分となりました.
[関連論文]
・真藤幸暉,吉本昂平,野村幸暉,李駿騁,今野実,大貫彰彦,高西淳夫,石井裕之,”高速で湾曲部通過が可能な空気圧駆動型管内移動ロボットの設計・製作”,第36回日本ロボット学会学術講演会,3F1-07,
2018年9月
・吉本昂平,野村幸暉,真藤幸暉,今野実,大貫彰彦,石井裕之,高西淳夫,”管内移動ロボットの推進を補助するチューブ押し出し機構の開発”,日本機械学会第18回機素潤滑設計部門講演会,U00051,2018年4月
WATER-2 (2016)
WATER-1は25A管の湾曲部を通過できませんでした.伸長ホースの推進力不足,後部バルーン剛体部のスタックが原因であり,これらの解決を試みました.
推進力不足の解決には、伸長ホースの使用圧力を0.7[MPa]に向上させるアプローチを取りました.伸長ホースの素材をシリコンゴムから天然ゴムチューブに変更した結果、伸長ホースの低変形性及び収縮力の向上を確認しました.また,伸長ホースのカバーには従来の散水ホース用カバーから網目の異なる蛇腹折りカバーに変更することで、伸長時のねじれを低減させることに成功しました.これにより,空気圧を効率よく推進力に変換することが可能になっています.
[関連論文]
吉本昂平,李駿騁,竹内弘美,野村幸暉,今野実,鳥海良一,石井裕之,高西淳夫,“湾曲部の通過が可能な空気圧駆動型管内移動ロボットの設計・製作”,35回日本ロボット学会学術講演会, 2E2-03
,2017年9月
WATER-1 (2015)
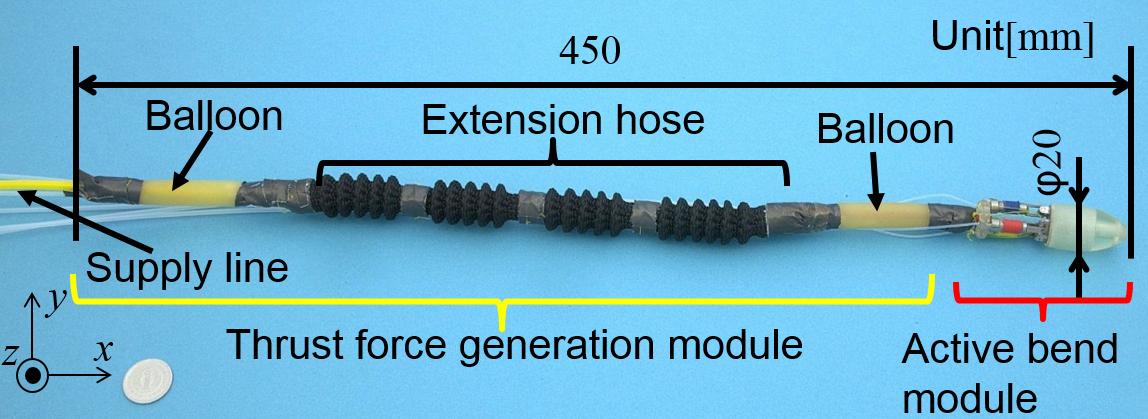
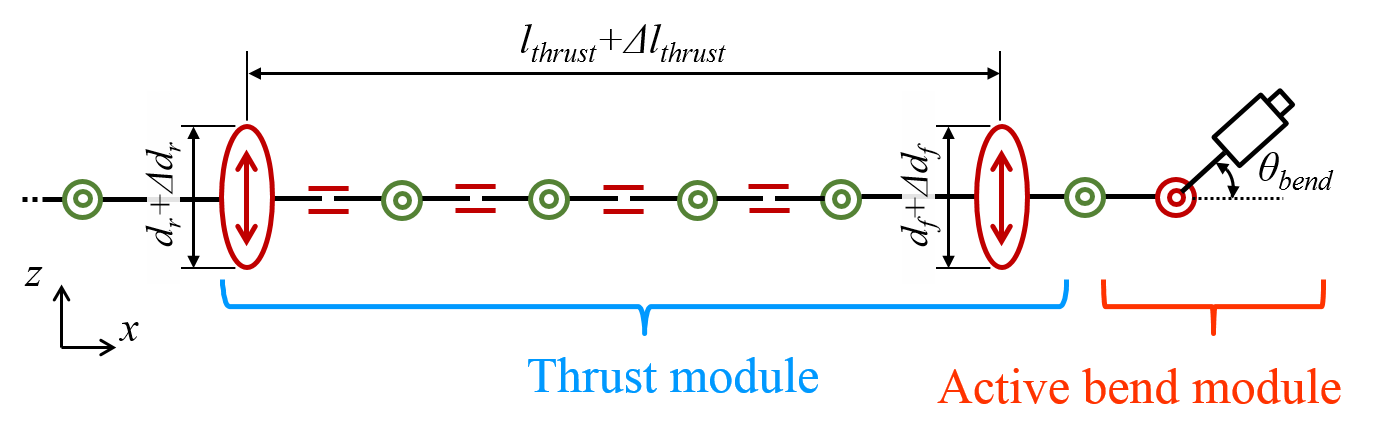
ガス管内の走行方法として,尺取虫のように推進・後退する方法を選択しました.設計・製作したWATER-1は推進モジュールと屈曲モジュールから構成されています.推進モジュールは前部バルーン,後部バルーン,伸長ホースから構成され、これら全てのアクチュエータが空気圧駆動になっています.バルーンは流入空気量により大きさを変化させ,任意のサイズの管壁を把持することが可能です.また,伸長ホースは加圧すると軸方向に伸びる特性をもっています.これらのアクチュエータを周期的に加圧・減圧することで推進します.屈曲モジュールは3自由度パラレルリンク機構で構成され、3本の空気圧シリンダの圧力制御により任意の方向に屈曲でき,管内の分岐選択が可能になりました.
[関連論文]
野村幸暉,佐藤衛,竹内弘美,今野実,鳥海良一,石井裕之,高西淳夫,伸長ホースと径可変バルーンを用いた管内移動ロボットの開発,”第34回日本ロボット学会学術講演会”,
2U1-03,2016年9月
空気圧応答の高速化
概要
ロボットはガス管の深部に進入すればするほど、後続のチューブが長くなり配管抵抗が大きい、必要な空気量が多くなるなどの原因により空気圧応答遅れが顕著に現れていました。このままではロボットを駆動するのに多大な時間を要し、効率的な検査ができなくなってしまうため、地上に設置していた電磁弁をロボットの直前に設置することにしました。しかし、ガス管内では火気の危険性を避けるために電気を使用できません。また電磁弁ではサイズが大きいという問題点もありました。そのため、電磁弁のように流路を切り替える小型の弁を設計し、駆動源は地上から遠く離れた深部にも応答性よくエネルギーを伝播できる水圧を選定しました。
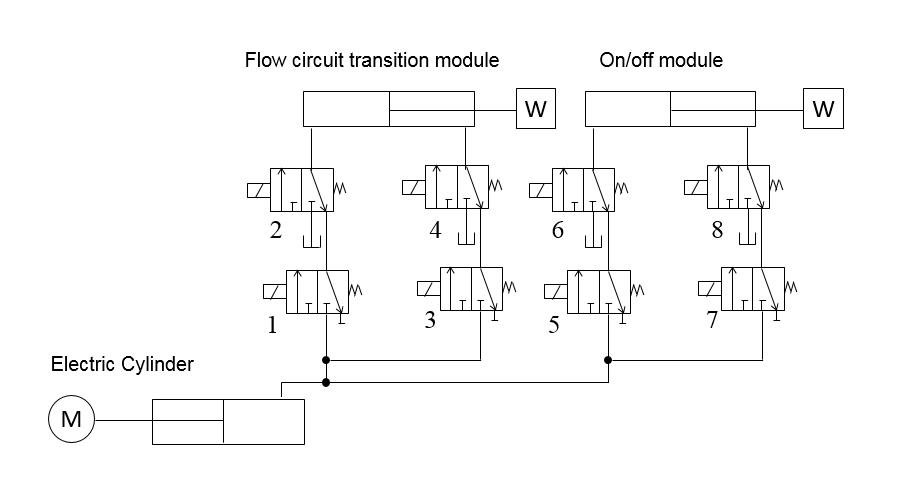
水圧駆動流路切替ユニット
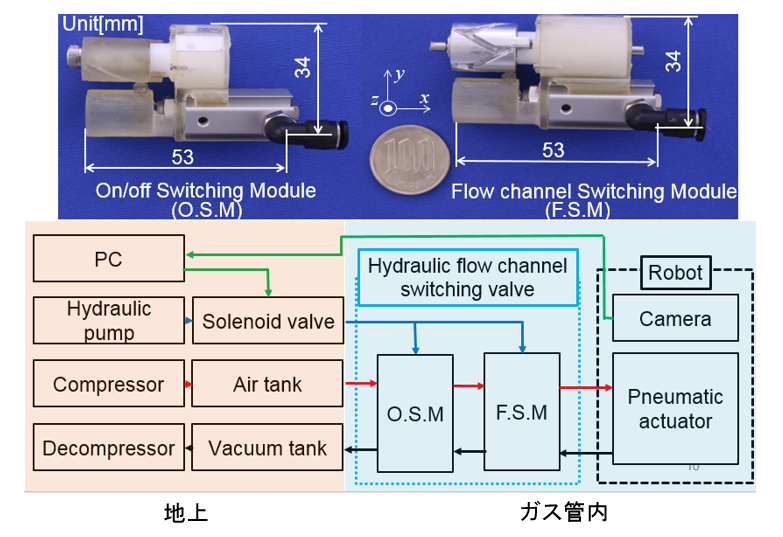
水圧駆動流路切替ユニットは流路切替モジュールとオンオフモジュールの2つから構成されています。流路切替モジュールはWATERのシーケンシャルな走行パターンに合わせて、どのアクチュエータの駆動をするかを選択可能です。ユニット内部にはロボット各部への流路が刻まれた流路体を内蔵し、その流路体を水圧で回転させることで、流路の切替を行っています。またオンオフモジュールは使用しているバルーンが過度な膨張をしないように流量を制限する役割を果たします。こちらも内部に流路体を組み込み、水圧印加により流路開閉を行います。