
 研究目的
研究目的
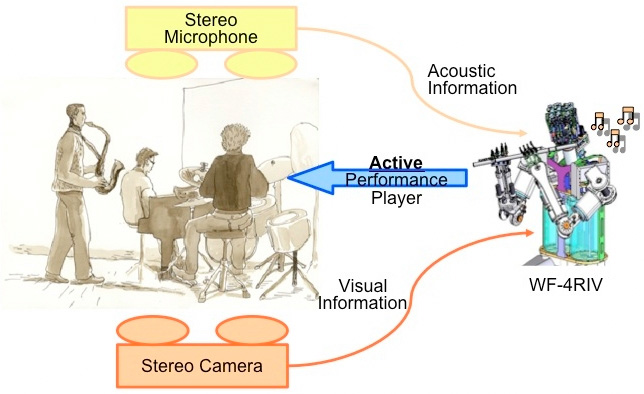
これまでの人間形フルート演奏ロボットWFシリーズは,ある決まった演奏を行うことは可能でしたが,共演者の演奏にリアルタイムで対応することはできませんでした.しかし最近では,ロボットによる共演者からの視覚的なキューの認識を行うインタラクションシステムの開発を行っています.これまで進めてきた研究は,主に視覚的なキューを発見することに焦点を置いてきました.今回は,ロボットがジャズバンドの一員となる事例について取り上げました.ジャズバンドの演奏においては,多くのパートで即興演奏が行われます.
音楽演奏ロボットの研究意義
- 音楽を人間の感性に直接作用させることが可能となる
- 人間の感性がどのような認識や処理を行うかを,より簡単に解明することが可能となる
- ロボットに人間の感性を理解させることにより,ロボットが人間の生活環境にスムーズに入って行くことが可能となる
- ロボットが人間形であることにより,ロボットが人間と同じ感性・身体機能を持っていると感じさせることが可能となる
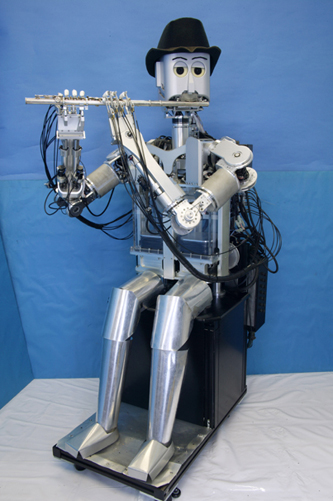
Wasada Flutist Robot(WFシリーズ)の歴史
 |
 |
 |
 |
| WF-1 (1990) |
WF-2 (1992) |
WF-3RIX (2002) |
WF-4 (2003) |
 |
 |
 |
|
| WF-4RIII (2006) |
WF-4RIV (2007) |
WF-4RIV - Visual Interaction (2008) |

音楽に基づくインタラクションシステム(MbIS)
私たちは,2つのレベルでのインタラクションを考慮するために、音楽に基づくインタラクションシステム(MbIS)を提案しました.2つのレベルを考慮した設計の目的は,システムを異なる技術レベルをもつ演奏者に適用させるためです.2人の演奏者が共演する場合を考えると,上級者は常に下級者に合わせてインタラクションの方法を適応させる必要があります.同じ技術レベルを持っている場合でさえ,演奏者はインタラクションし,お互いに音楽的コミュニケーションをする方法を獲得する必要があります.私たちは人間形ロボットにそのような振る舞いを行わせたいと考えています.ロボットと共演するという経験がない人は,人間とロボットのインタラクションの特殊性に適応するために,より多くの時間を必要とするでしょう.そのため,私たちは確立したスタジオ設備に強い類似性を持つ学びやすいコントローラーを有する初心者レベルのインタラクションシステムを設計しました.上級者を考慮すると,ロボットはより洗練された創造的な表現方法を満たすインタラクションシステムをもつ必要があります.従って,上級レベルのインタラクションシステムはパフォーマンスパラメータの自由なコントロールを考慮しています.
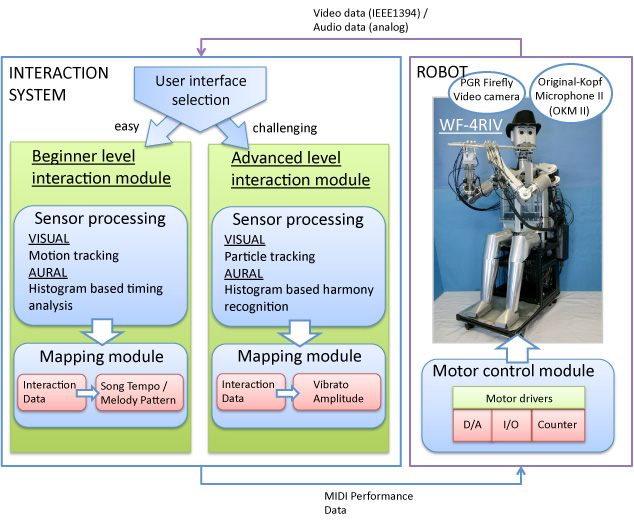
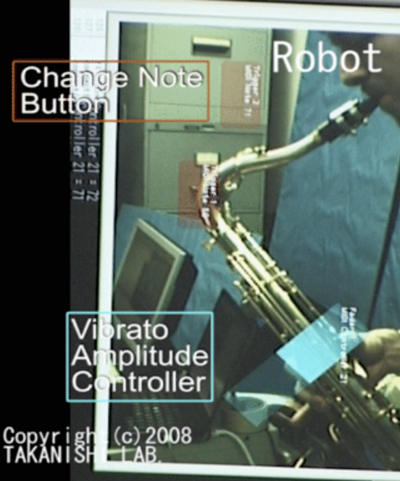
聴覚によるインタラクション
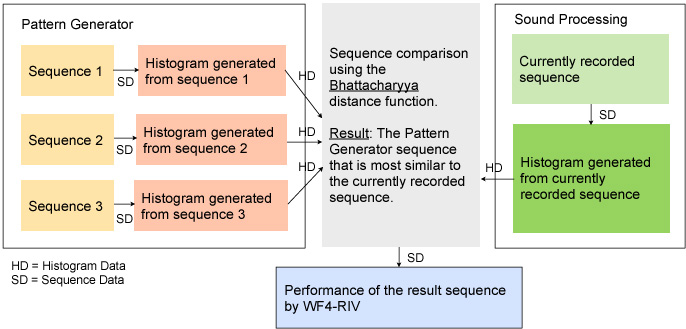
初心者レベルでの聴覚によるインタラクションでは,リズムによるコミュニケーション方法だけを使用することにより,複雑さを減少させます.ロボットは音列を分析して,そのタイミングを自らの演奏で再現します.このインタラクションモードでは,演奏家は多くの調和的な内容を気にすることなく,自分の演奏のリズムに集中することができ,初心者の技術レベルのみ必要となります.
上級レベルでのインタラクションは,より多くのロボットとのインタラクション経験だけでなく,より巧妙な演奏パラメータのコントロールを必要とします.このモードでは,ユーザーはフルート演奏ロボットと共演するために,さらなる調和を選択することができます.言い換えると,音楽のリズムを分析することに加えて,演奏家の音程を分析します.その結果,ロボットは,演奏家のリズムとメロディーに適応した演奏を行います.
演奏ムービー
|
"Passive" Performance Duo with the WF4-RIV (right-click to download movie) |
 |
Acoustic interaction with the WF4-RIV (right-click to download movie) |
謝辞
本研究は早稲田大学ヒューマノイド研究所で,岐阜県からの委託であるWABOT-HOUSEプロジェクトとRT-GCOE Global Robot Academiaの援助のもと行われました.ここに感謝の意を表します.
| Humanoid Robotics Institute, Waseda University |
Wabot-House Laboratory, Waseda University |
Global Robot Academia RT-GCOE of Waseda University |
(c) 2009 Takanishi Laboratory