Japanese / English

 Motivation and Research Objective
Motivation and Research Objective
The research on the anthropomorphic flutist robot, started at Waseda University since 1990, has focused on three main goals:
- Clarifying the human motor control while playing the flute from an engineering point of view
- Enabling the communication with humans at the emotional level of perception (i.e. performing a duet with a professional flutist player)
- Proposing novel applications of humanoid robots (i.e. transferring flute playing skills to unskilled persons).

Waseda Flutist Robot History
 |
 |
 |
 |
| WF-1 (1990) |
WF-2 (1992) |
WF-3RIX (2002) |
WF-4 (2003) |
 |
 |
 |
 |
| WF-4RIII (2006) |
WF-4RIV (2007) |
WF-4RIV - Visual Interaction(2008) |
WF-4RIV - Visual Interaction(2009) |
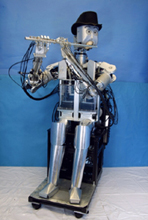
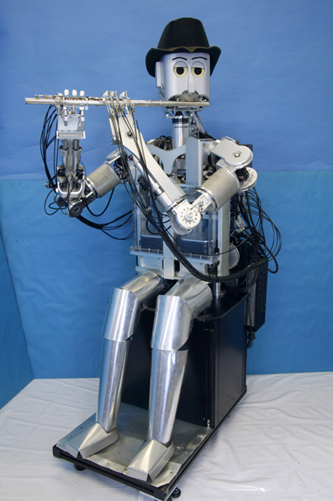
Overview of WF4-RV
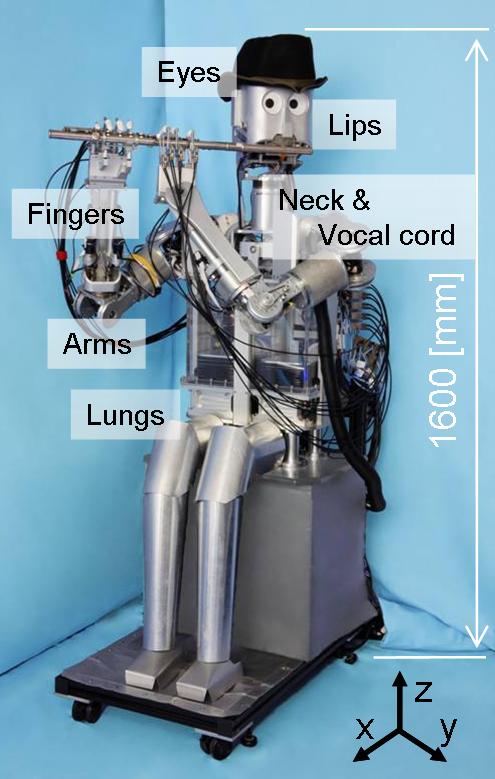
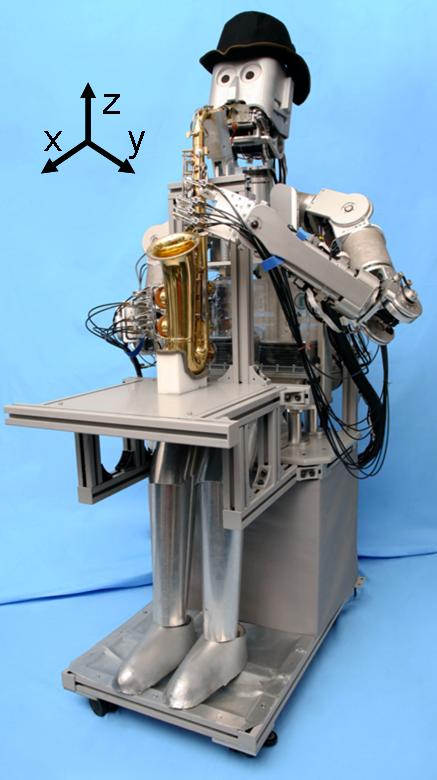
In 2009, we developed the anthropomorphic flutist robot WF-4RV(Waseda Flutist No.4 Refined V) with 41-DOFs which has enhanced its flute performance by producing more natural notes and smoother transitions between notes. In this year, an array of sensors has been designed to detect the flute's force on lip. Furthermore, the lung have been redesigned to enable the robot to play saxophone.
 |
 |
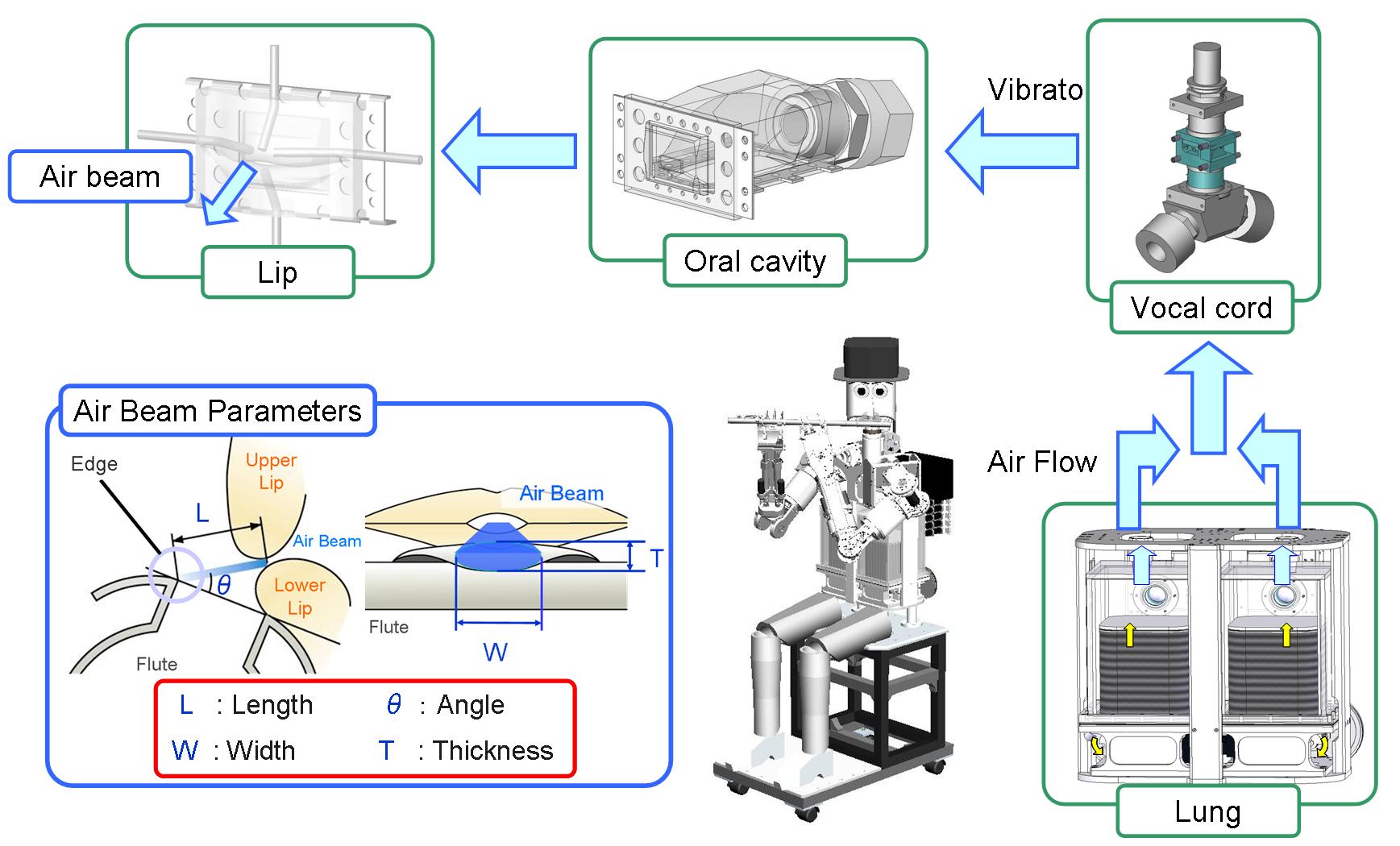
The robot is playing a musical instrument by the mechanism similar to human. The air sent off by lungs is sent to vocal chords and gives the expression of the vibrato. And, playing the flute has been achieved by doing the tonguing in the oral cavity, and adjusting the air beam by lips.

|
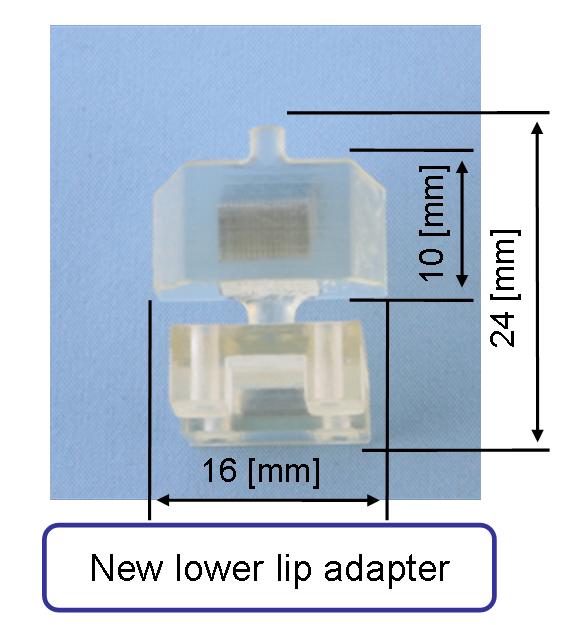
It was difficult to install the force sensor because of cylinder shaped pin. By development of new pin with area to place force sensor (SF-3, INABA RUBBER CO.,LTD), it became possible to place 4 force sensors in lip unit. |
|
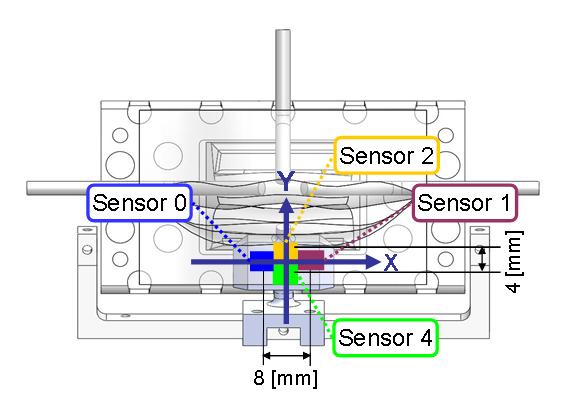 |
The artificial lips were designed to measure force actuated by instrument and detect force during performance, by four force sensor applied to lower lip. Using data from sensors, robot may be able to adjust instrument position. |
|
|
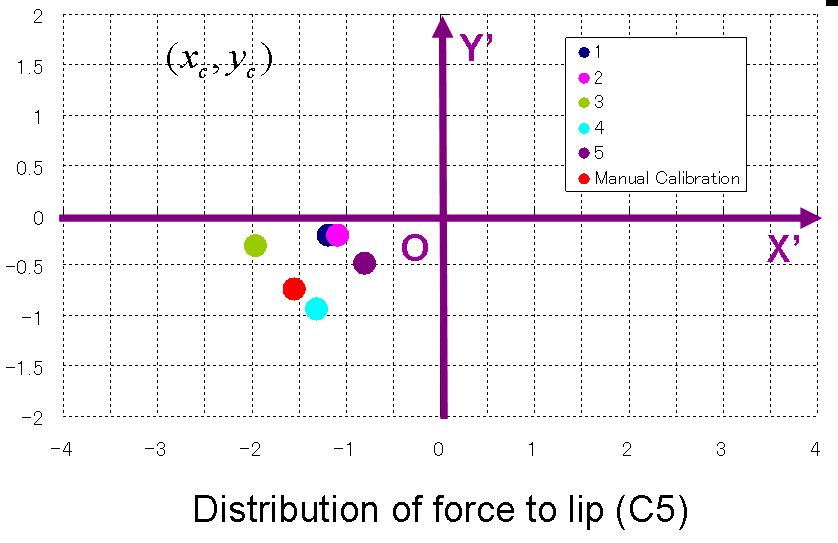
The force and position of contact point for each played note, has changed as shown on distribution chart. |

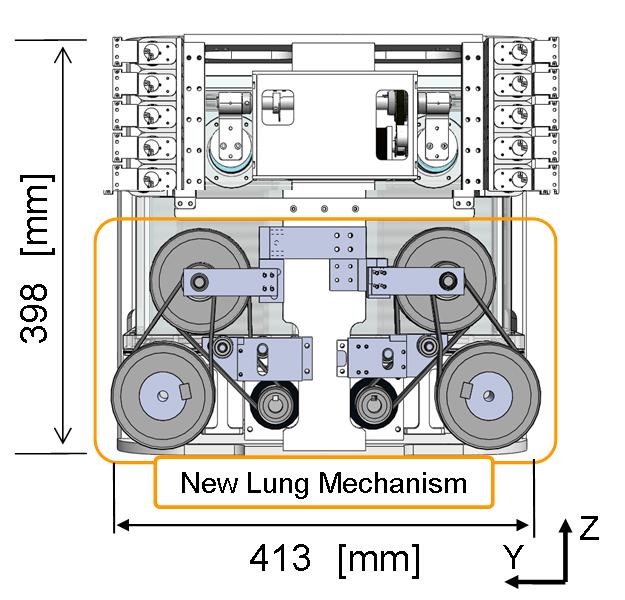
The lung system is composed by two acrylic cases, which are sealed airtight, containing a bellow which is controlled by a crank mechanism to breathe air in and out from them.
By refining lung for saxophone performance, output air pressure has extended. As a result, performance of B3・C4・C#4 notes for saxophone were achieved (A3~D5 could be performed by pressing the saxophone key manually).
 |
 |
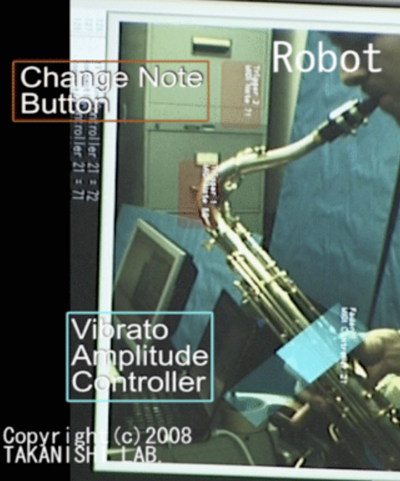
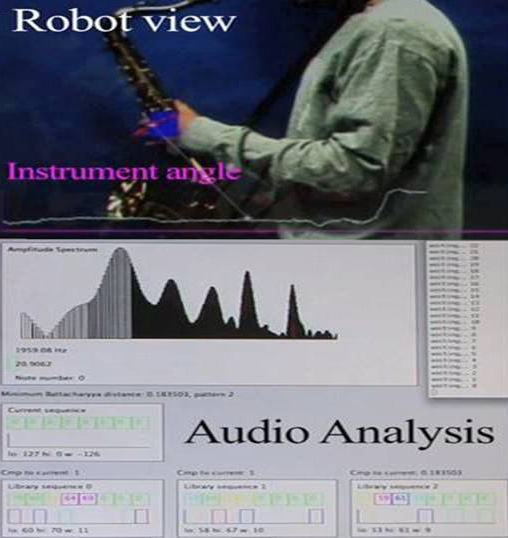
Performance System
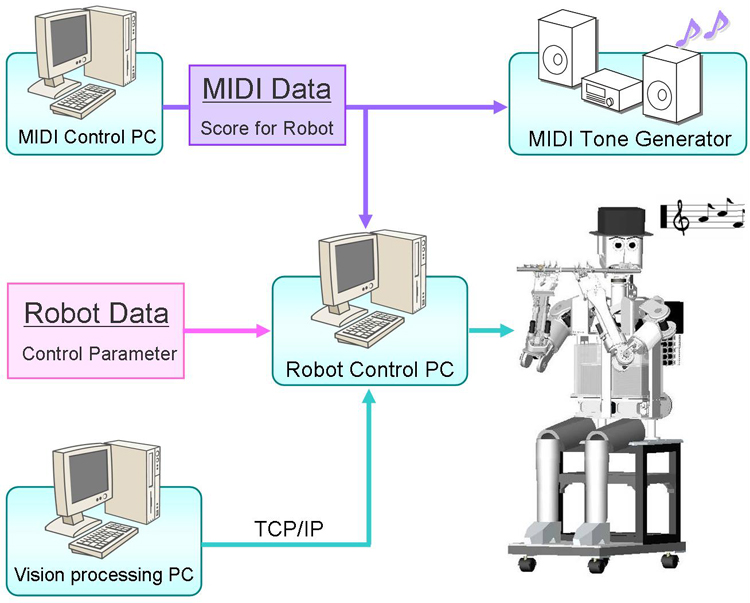
The MIDI accompaniment system of WF-4RV consists of three computers to control the robotAfs musical performance: one for controlling the robot, and another one to generate the accompaniment MIDI data, and the other one for processing the data from the CCD Cameras. These computers are connected by the MIDI system, and the synchronization of the performance is achieved by using the MIDI signal.
Performance Movies
 |
Saxophone performance of C4 by WF4-RV (Because the hand doesn't correspond to musical instruments, only the single sound can be performed. A3~D5 could be performed by pressing the saxophone key manually.) (right-click to download movie) |
|
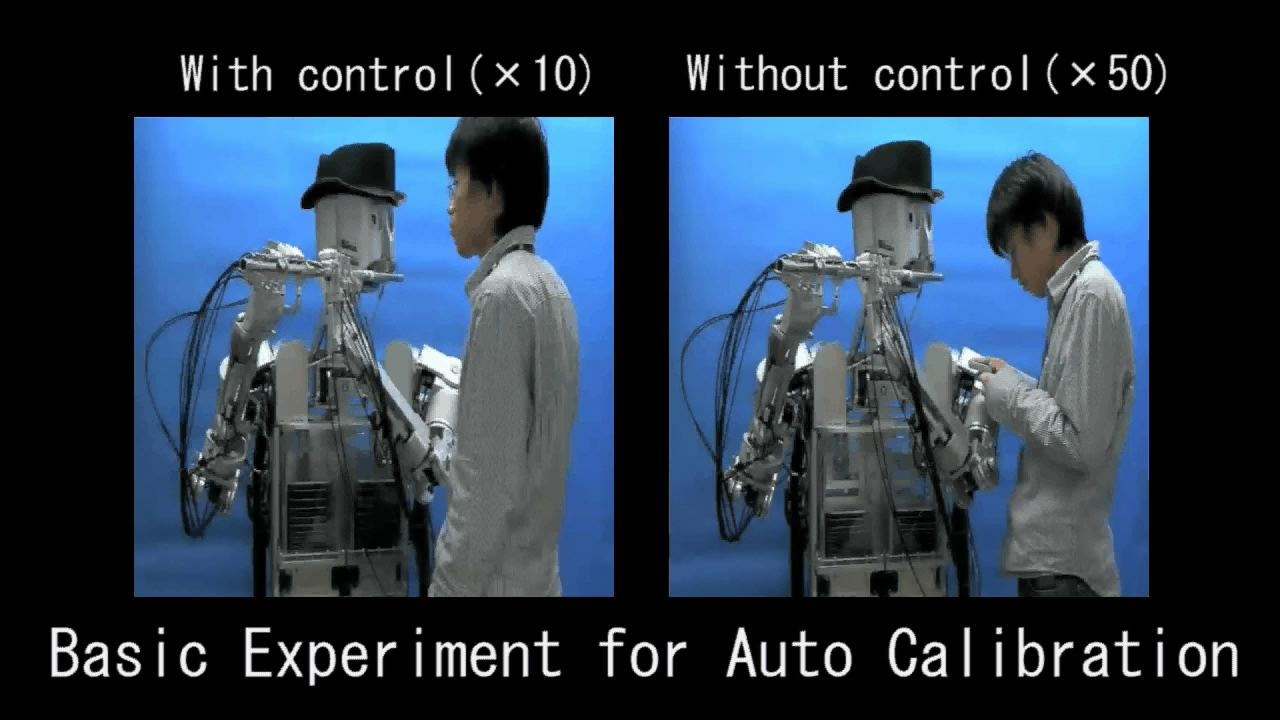 |
In this movie, it can be seen that the calibration time has been shortened as a result of basic experiment, which setting the threshold of power, and rotating the joint of the wrist if the value from the power sensor is less than threshold value. (right-click to download movie) |
|
 |
"Autumn Leaves" performance by WF4-RV (right-click to download movie) |
Special Thanks
This research was conducted at the Humanoid Robotics Institute (HRI), Waseda University. It was and is supported by a Grant-in-Aid for the WABOT-HOUSE Project by Gifu Prefecture and the RT-GCOE Global Robot Academia of Waseda University.
WF-4RIV has been designed by 3D CAD software "SolidWorks". Special thanks to SolidWorks Japan K.K. for the software contribution.
 |
|||
| Humanoid Robotics Institute, Waseda University |
Wabot-House Laboratory, Waseda University |
Global Robot Academia RT-GCOE of Waseda University |
SolidWorks Japan K.K. |
(c) 2010 Takanishi Laboratory