Japanese / English

 尋媶栚揑
尋媶栚揑
丂崅惣尋媶幒偱偼丆恖偺怱恎偺儊僇僯僘儉傪捛媦偟丆恖娫偲儘儃僢僩偺嫟惗傪栚巜偟偰僸儏乕儅僲僀僪儘儃僢僩偺尋媶奐敪傪峴偭偰偄傑偡丏偦偺拞偱恖娫偲忣弿偁傞偄偼姶惈儗儀儖偱偺岎棳偑偱偒傞偙偲偼丆僸儏乕儅僲僀僪儘儃僢僩偵偍偗傞廳梫側婡擻偺傂偲偮偱偁傞偲峫偊偰偄傑偡丏偦偙偱巹偨偪偼偦偺傛偆側応偲偟偰偺壒妝嬻娫偵拝栚偟丆恖娫宍僼儖乕僩墘憈儘儃僢僩偺奐敪傪峴偭偰偄傑偡.
丂杮儘儃僢僩偼丆僼儖乕僩墘憈帪偵偍偗傞恖懱奺婍姱偺摥偒傪婡夿儌僨儖偱嵞尰偡傞偙偲偱丆恖娫偺僼儖乕僩墘憈偺儊僇僯僘儉丆昞尰椡偺崅偄墘憈庤朄丆偍傛傃恖娫偲儘儃僢僩偲偺壒妝嬻娫偵偍偗傞僀儞僞儔僋僔儑儞傪岺妛揑帇揰偵棫偭偰捛媮偟丆壒妝傪捠偠偰恖乆偵姶摦傪梌偊傞偙偲傪栚揑偲偟偰偄傑偡丏
丂恖娫宍僼儖乕僩墘憈儘儃僢僩偺尋媶偼1990擭偵奐巒偝傟丆僼儖乕僩墘憈偵偍偗傞偝傑偞傑側婍姱偺摥偒傪柾媅偟偨婡夿僴乕僪僂僃傾偺奐敪偲丆MIDI敽憈摨婜僔僗僥儉偺峔抸傪峴偄丆偙傟傑偱偵WF僔儕乕僘偲偟偰4懱偺恖娫宍僼儖乕僩墘憈儘儃僢僩傪奐敪偟偰偒傑偟偨丏傑偨丆墘憈偺昞尰椡岦忋偲儘儃僢僩偺帺棩惈偺岦忋傪栚巜偟偨僼儖乕僩悂柭壒偺帺棩扵嶕偺尋媶傗丆恖娫傪柾曧偟偨墘憈偵娭偡傞尋媶丆偝傜偵嫵堢巟墖儘儃僢僩偲偟偰偺棙梡偲偄偭偨恖娫偲儘儃僢僩偺僀儞僞儔僋僔儑儞偵娭偟偰傕尋媶傪恑傔偰偄傑偡丏

Wasada Flutist Robot 偺楌巎
 |
 |
 |
 |
| WF-1 (1990) |
WF-2 (1992) |
WF-3RIX (2002) |
WF-4 (2003) |
 |
 |
 |
 |
| WF-4RIII (2006) |
WF-4RIV (2007) |
WF-4RIV - Visual Interaction (2008) |
WF-4RIV - Visual Interaction (2009) |
WF4-RV偺奣梫
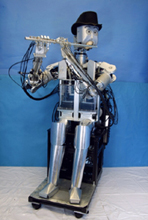
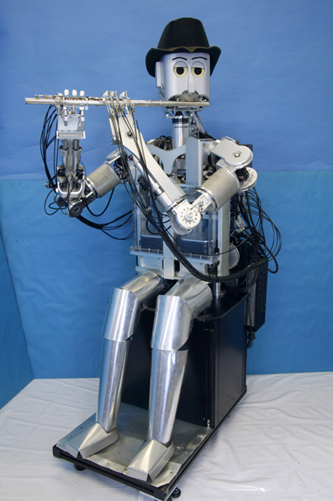
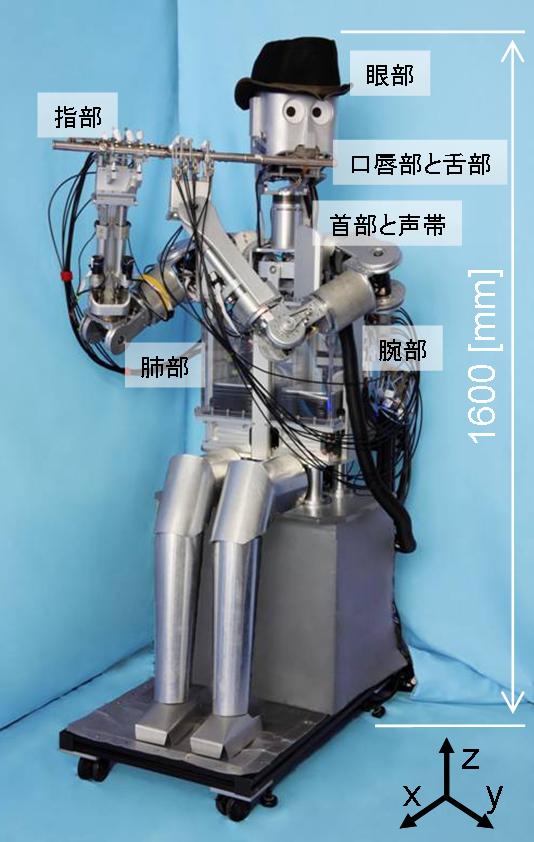
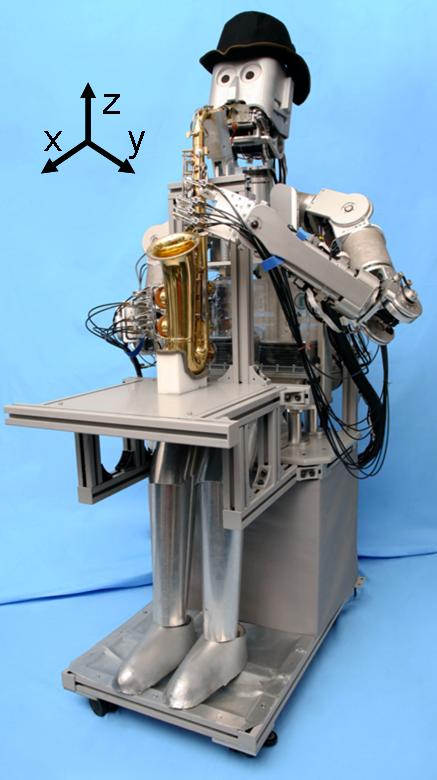
丂2009擭偵奐敪偟偨恖娫宍僼儖乕僩墘憈儘儃僢僩 WF-4RV(Waseda Flutist No.4 Refined V)偼丆僼儖乕僩墘憈偵昁梫側恖懱奺婍姱偺婡擻傪嵞尰偟偨奺晹婡峔傪旛偊偰偍傝丆慡41帺桼搙偱峔惉偝傟偰偄傑偡丏
 |
 |
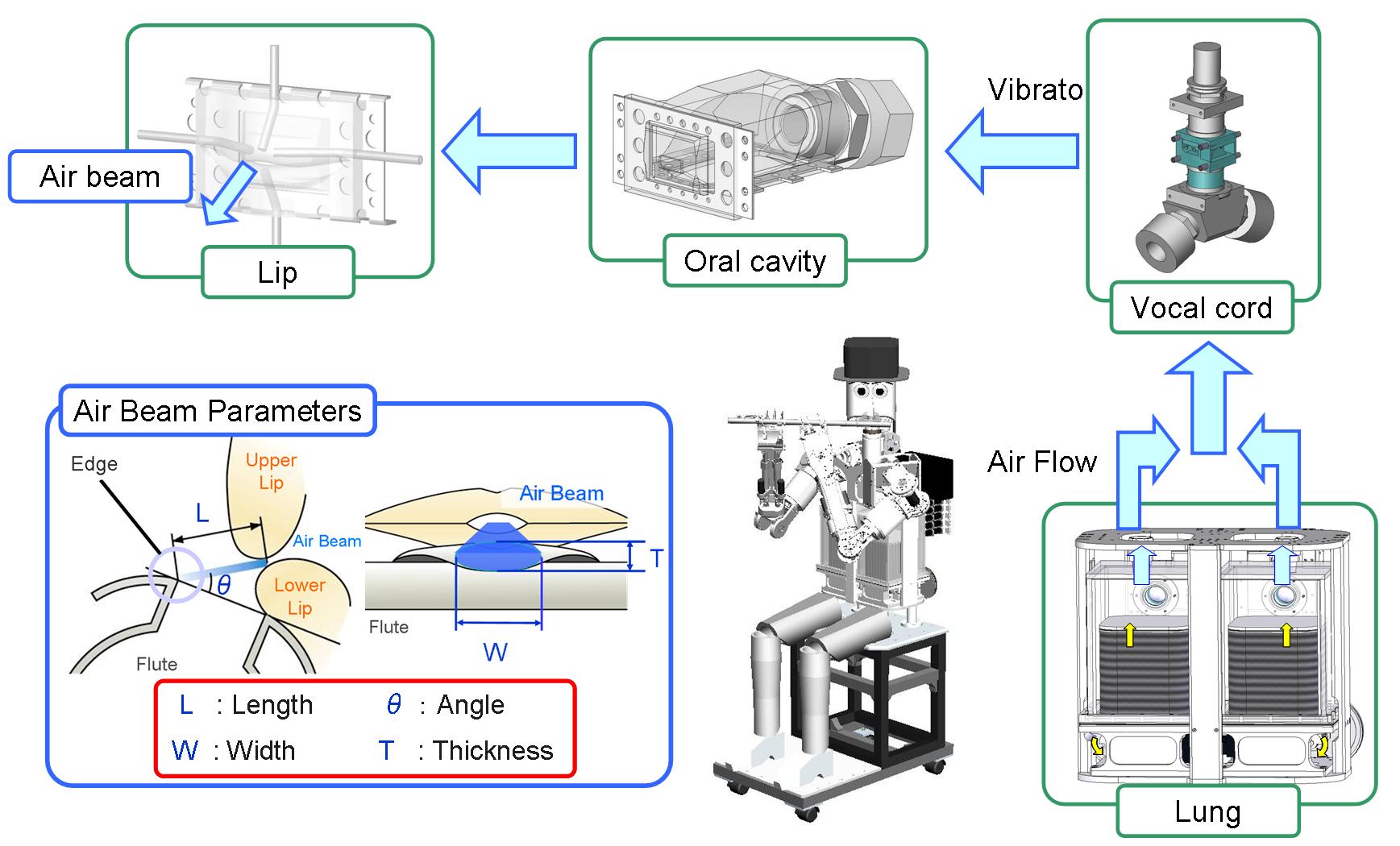
丂儘儃僢僩偼丆恖娫偲摨條偺儊僇僯僘儉偵傛偭偰丆妝婍傪墘憈偟偰偄傑偡丏攛偐傜憲傝弌偝傟偨嬻婥偼惡懷晹偵憲傜傟價僽儔乕僩偺昞尰傪晅梌偟傑偡丏偦偟偰丆岥峯晹偱偼僞儞僊儞僌傪偍偙側偄丆岥怬晹偱嬻婥價乕儉偺挷惍傪峴偆偙偲偱僼儖乕僩偺墘憈傪幚尰偟偰偄傑偡丏

|
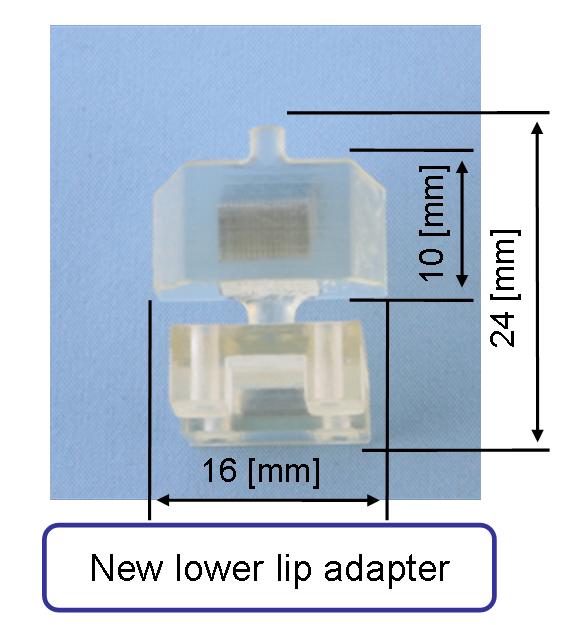
丂嶐擭搙傑偱偺岥怬偱偼丆朹忬偺僺儞傪梡偄偰撍偒弌偟摦嶌傪峴偭偰偄偨偨傔丆柺傪帩偭偨僺儞偺奐敪傪峴偄丆椡僙儞僒(SF-3, INABA RUBBER CO.,LTD)傪廲偲墶偵偦傟偧傟2偮搵嵹偡傞偙偲偑壜擻偵側傝傑偟偨丏 | |
|
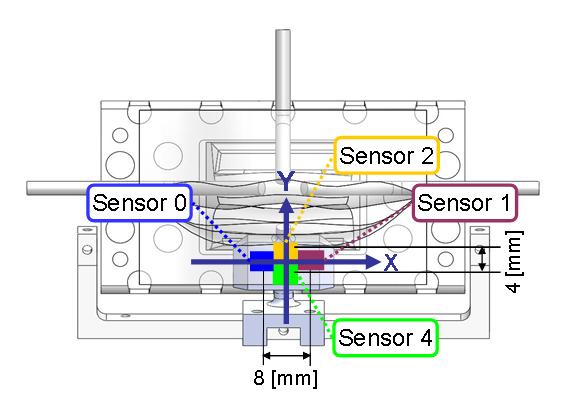
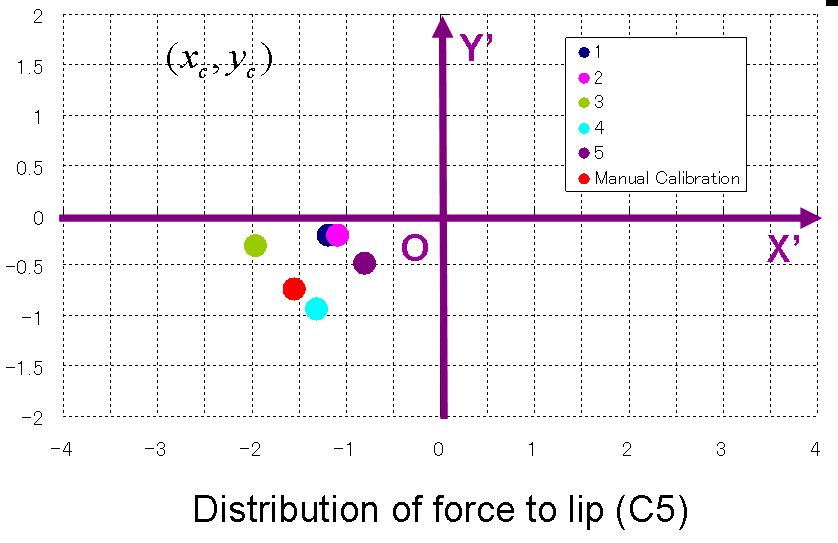
丂椡僙儞僒傪係偮搵嵹偟偨岥怬晹傪嶌惉偟丆妝婍偐傜岥怬偵壛傢傞椡偺應掕偑壜擻偱偡丏偙傟傪棙梡偡傞偙偲偱墘憈壒偛偲偺僨乕僞傪庢摼偟丆僉儍儕僽儗乕僔儑儞偺曗彆傪峴偆偙偲偑偱偒傑偡丏 | |
|
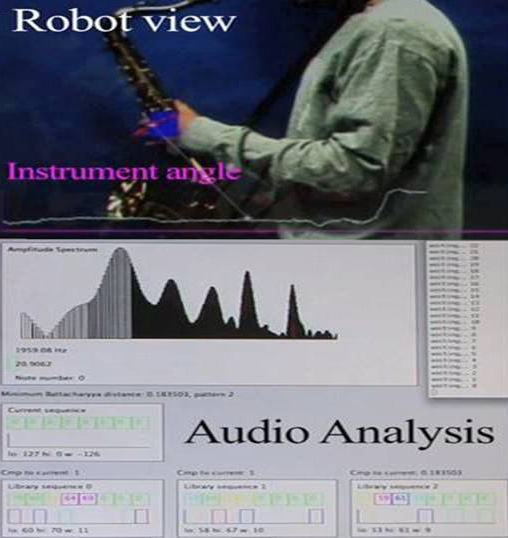
丂暘晍恾傪尒傞偲夞悢偛偲偵愙怗揰偺埵抲偑曄壔偟偰偍傝丆僉儍儕僽儗乕僔儑儞偺嵺偺僶儔偮偒丆偍傛傃墘憈壒偛偲偺椡偺曄壔傪専弌偡傞偙偲偑壜擻偱偡丏 |

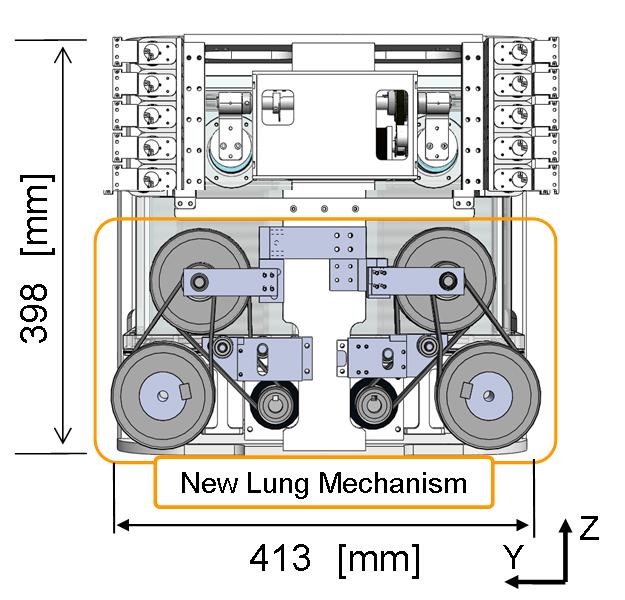
丂攛偼恖娫偺傛偆偵嵍塃偵暘偐傟偰偍傝丆僽儗僗傪峴偄傑偡丏僕儍僶儔傪梡偄偰枾暵偟偨嬻娫傪僋儔儞僋婡峔偵傛傝墴偟弌偡偙偲偱嬻婥傪憲傝弌偟傑偡丏
丂攛晹偺尭懍婡峔傪懡抜偵偟丆尭懍斾傪曄壔偝偣傞偙偲偱丆傛傝崅偄埑椡傪弌椡壜擻偵側傝傑偟偨丏偙傟偵傛偭偰丆僼儖乕僩儘儃僢僩偵傛傞僒僉僜僼僅儞偺悂柭傪幚尰偟丆B3丒C4丒C#4偺3壒偺悂柭偵惉岟偟傑偟偨丏
 |
 |
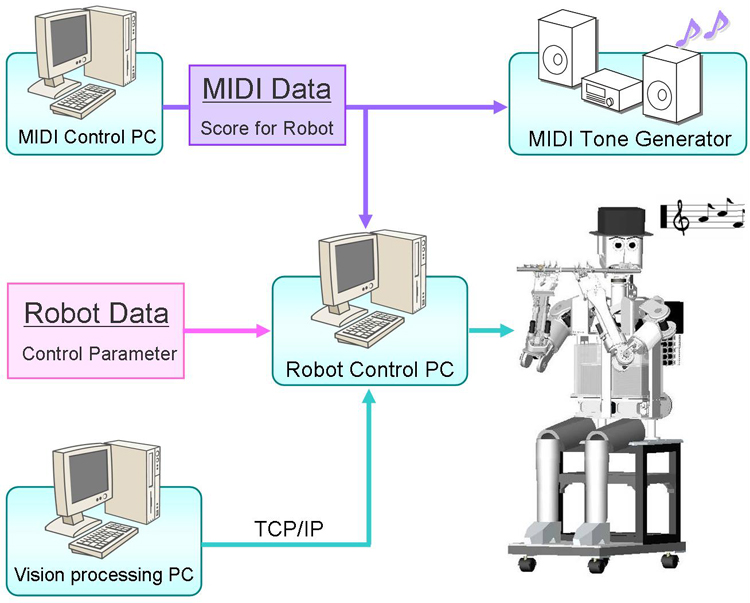
墘憈僔僗僥儉
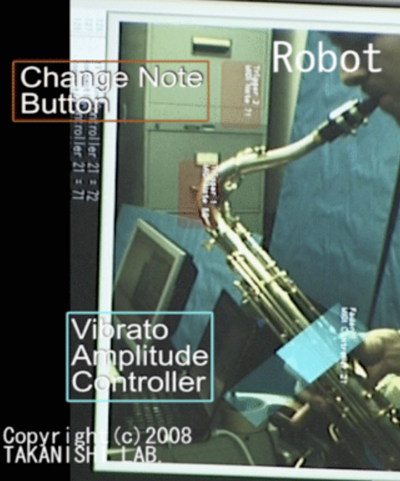
丂恖娫宍僼儖乕僩墘憈儘儃僢僩WF-4RV偼丆敽憈梡MIDI僨乕僞偺弌椡傪峴偆MIDI僐儞僩儘乕儖僷僜僐儞偲儘儃僢僩惂屼梡僷僜僐儞偍傛傃夋憸張棟梡僷僜僐儞偵傛傝墘憈傪峴偭偰偄傑偡丏MIDI僐儞僩儘乕儖僷僜僐儞偼MIDI壒尮傊偺敽憈僨乕僞傪弌椡偟丆MIDI怣崋偵摨婜偟偰儘儃僢僩惂屼僷僜僐儞偑儘儃僢僩偺惂屼傪峴偄傑偡丏儘儃僢僩惂屼僷僜僐儞偼儘儃僢僩僨乕僞偲屇傫偱偄傞僨乕僞傪棙梡偟偰墘憈傪峴偄傑偡丏儘儃僢僩僨乕僞偵偼奺壒柤偵懳偡傞儘儃僢僩偺惂屼僷儔儊乕僞偑婰榐偝傟偰偄傑偡丏傑偨夋憸張棟梡僷僜僐儞偱偼CCD僇儊儔偐傜庢傝崬傫偩僨乕僞偺張棟傪峴偄傑偡丏
墘憈儉乕價乕
 |
WF4-RV偵傛傞僒僉僜僼僅儞偺扨壒悂柭 (僴儞僪偑僒僉僜僼僅儞偵懳墳偟偰偄側偄偨傔丆扨壒偺傒偺悂柭偲側傝傑偡丏妝婍偺僉乕憖嶌傪恖偺庤偱峴偆偙偲偱A3乣D5偺悂柭偑壜擻偱偡丏) (right-click to download movie) |
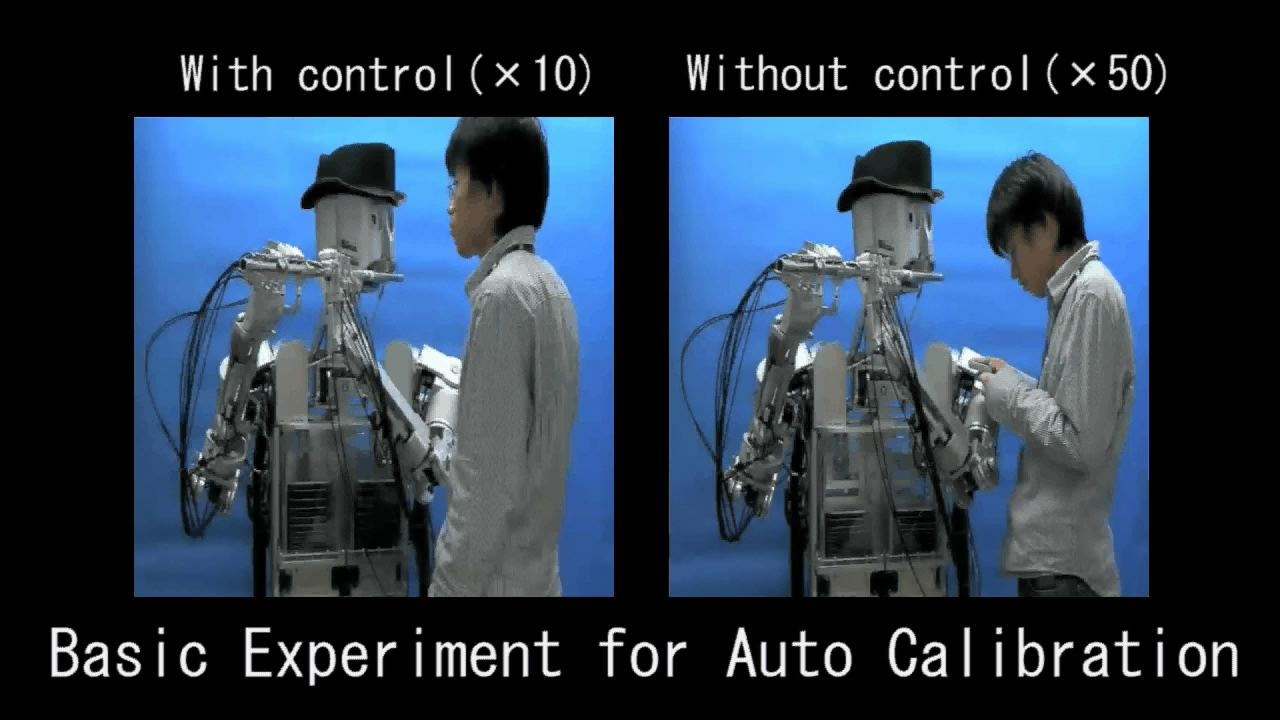 |
椡偺鑷抣傪愝掕偟丆椡僙儞僒偐傜偺抣偑偦傟埲壓偱偁傟偽庤庱偺娭愡傪夞揮偝偣傞丆偲偄偆幚尡傪峴偭偨寢壥丆僉儍儕僽儗乕僔儑儞帪娫偑抁弅偝傟偰偄傞偙偲偑暘偐傝傑偡丏 (right-click to download movie) |
 |
"Autumn Leaves" performance by WF4-RV (right-click to download movie) |
幱帿
丂杮尋媶偼憗堫揷戝妛僸儏乕儅僲僀僪尋媶強偱丆婒晫導偐傜偺埾戸偱偁傞WABOT-HOUSE僾儘僕僃僋僩偲RT-GCOE Global Robot Academia偺墖彆偺傕偲峴傢傟傑偟偨丏偙偙偵姶幱偺堄傪昞偟傑偡丏
丂WF4-RV偼3D-CAD僜僼僩僂僃傾 "SolidWorks" 傪梡偄偰愝寁偟傑偟偨丏杮僜僼僩僂僃傾傪採嫙偟偰捀偒傑偟偨僜儕僢僪儚乕僋僗丒僕儍僷儞姅幃夛幮偵傕姶幱抳偟傑偡丏
 |
|||
| Humanoid Robotics Institute, Waseda University |
Wabot-House Laboratory, Waseda University |
Global Robot Academia RT-GCOE of Waseda University |
僜儕僢僪儚乕僋僗丒 僕儍僷儞 姅幃夛幮 |
(c) 2010 Takanishi Laboratory