Japanese / English
 Motivation and Research Objective
Motivation and Research Objective
The research on the anthropomorphic flutist robot, started at Waseda University since 1990, has focused on three main goals:
- Clarifying the human motor control while playing the flute from an engineering point of view
- Enabling the communication with humans at the emotional level of perception (i.e. performing a duet with a professional flutist player)
- Proposing novel applications of humanoid robots (i.e. transferring flute playing skills to unskilled persons).

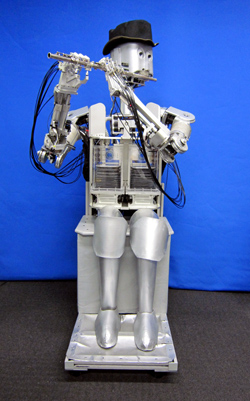
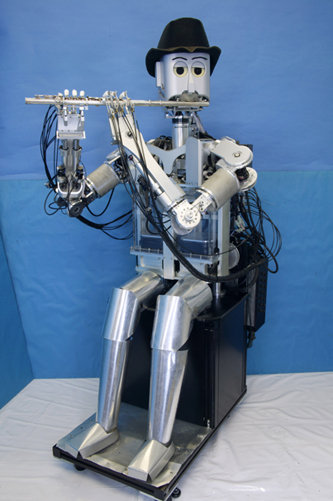
Waseda Flutist Robot History
 |
 |
 |
 |
| WF-1 (1990) |
WF-2 (1992) |
WF-3RIX (2002) |
WF-4 (2003) |
 |
 |
 |
 |
| WF-4RIV (2007) |
WF-4RV (2010) |
WF-4RIV - Visual Interaction (2008) |
WF-4RIV - Visual Interaction (2009) |
Overview of WF-4RVI
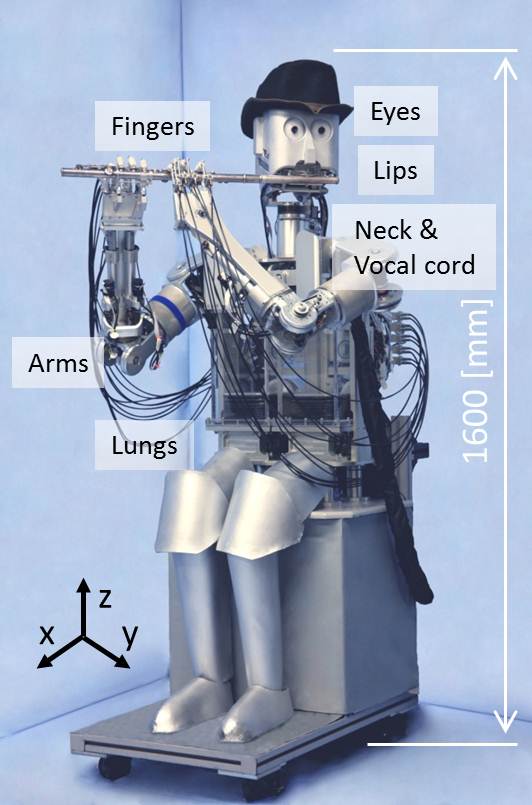
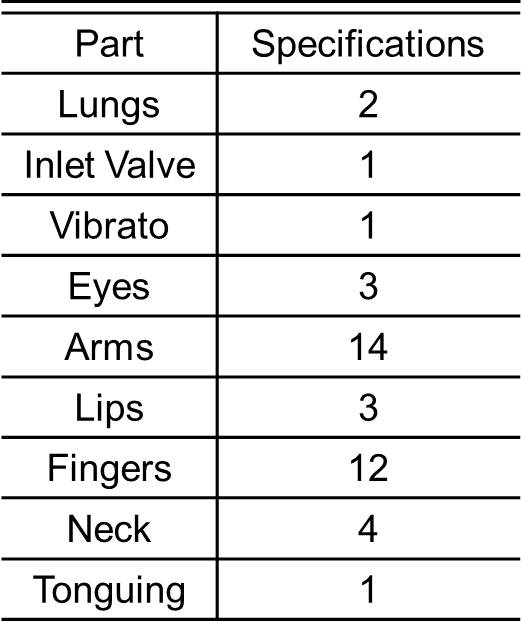
In 2010, we developed the anthropomorphic flutist robot WF-4RVI(Waseda Flutist No.4 Refined VI) with 41-DOFs which has enhanced its flute performance by producing more natural notes and smoother transitions between notes. In this year, based on head MR images of professional flutists, we re-designed the lip and oral cavity of the robot and verified the efficiency of sound generation has been strongly improved.
 |
 |
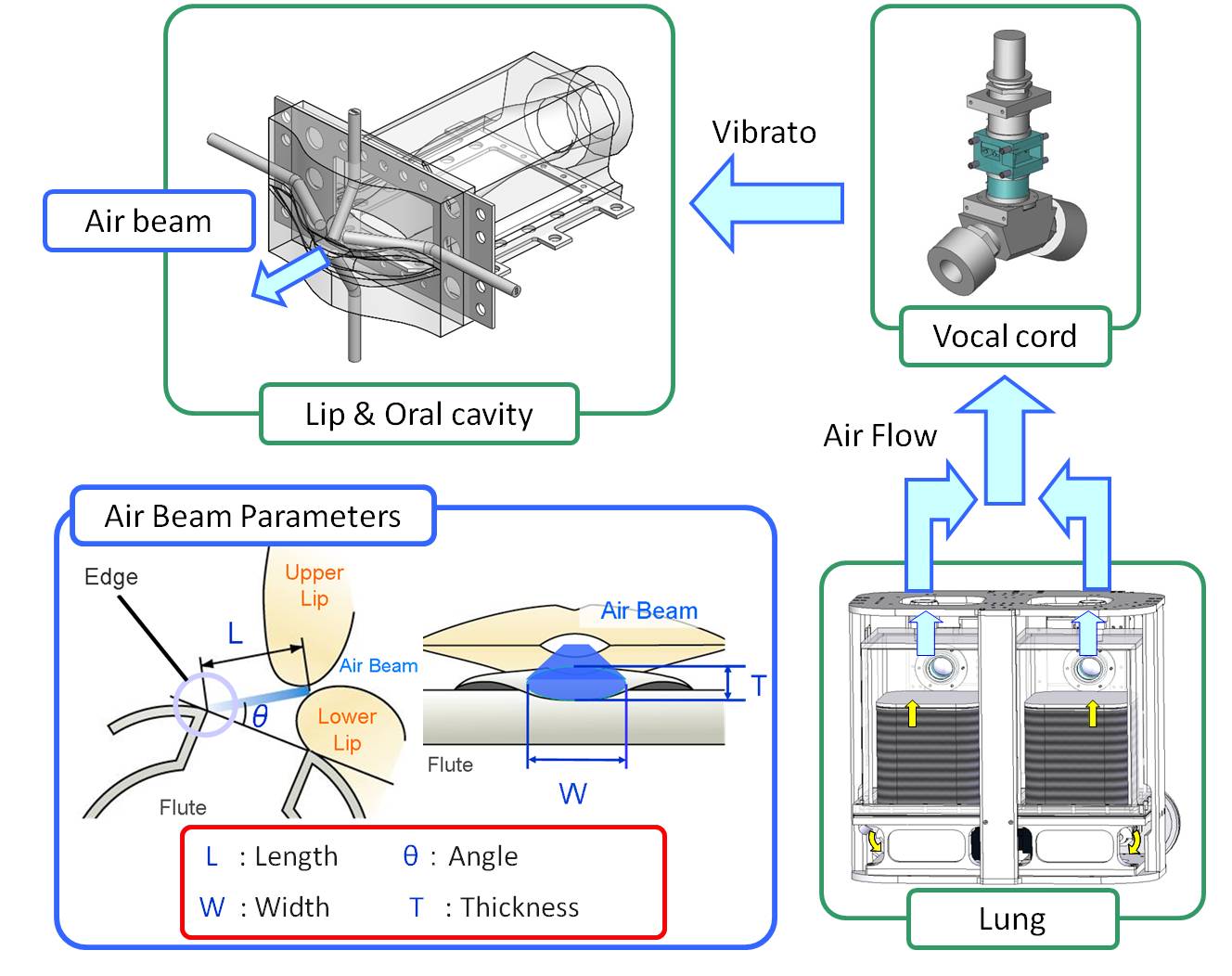
The robot is playing a musical instrument by the mechanism similar to human. The air sent off by lungs is sent to vocal chords and gives the expression of the vibrato. And, playing the flute has been achieved by doing the tonguing in the oral cavity, and adjusting the air beam by lips.

|
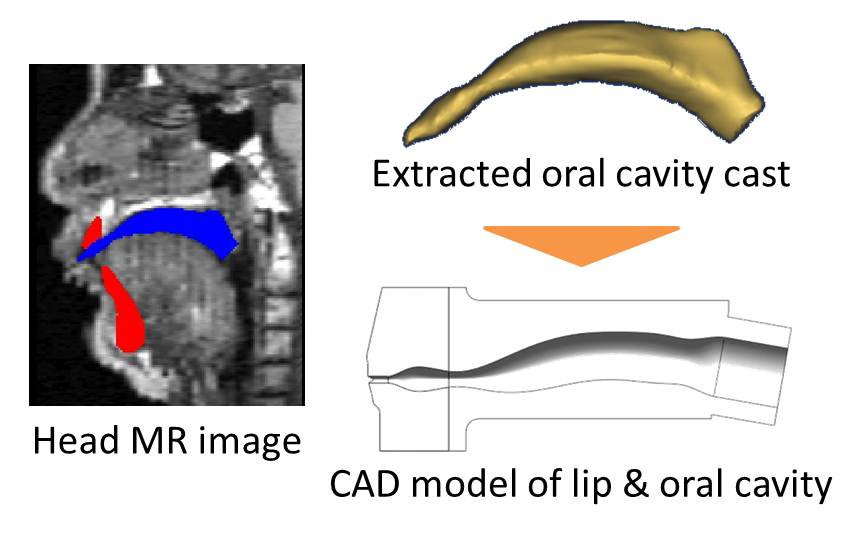
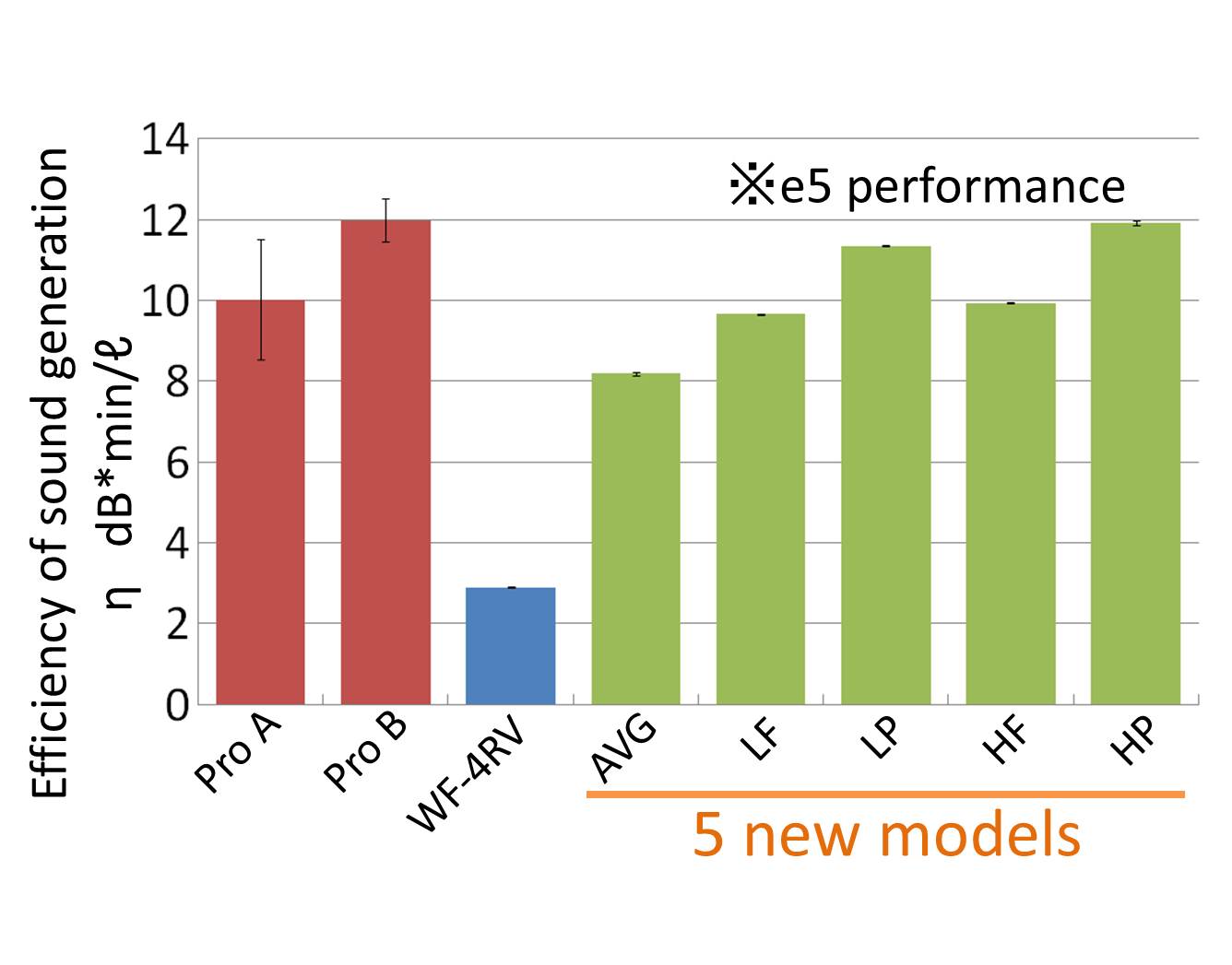
By obtaining head MR images of professional flutists, we measured the shape of the oral cavity during flute playing and extracted oral cavity casts. According to the result of the extraction, we re-designed the lip and oral cavity of the robot. | |
|
As a result, we verified the efficiency of sound generation has been strongly improved for all of new 5 models and realized much longer duration and greater volume of sound generated in one breath. | |
|
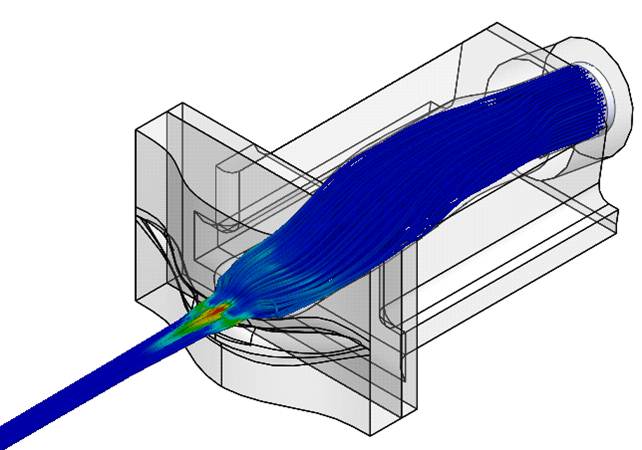
Furthermore, we conducted the fuid analisys of expiratory flow and the result suggested the vorticity corelate with efficiency of sound generation. |
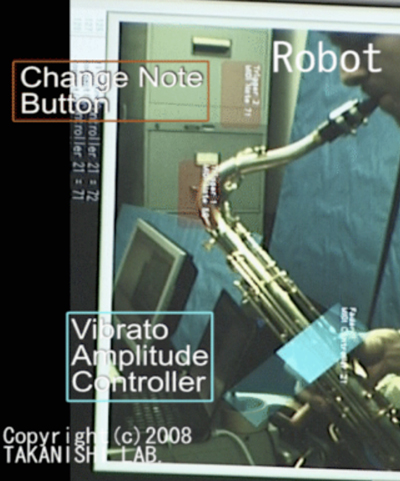
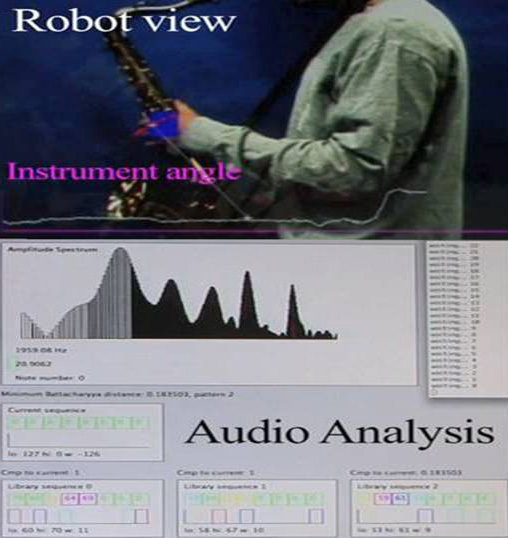
Performance System
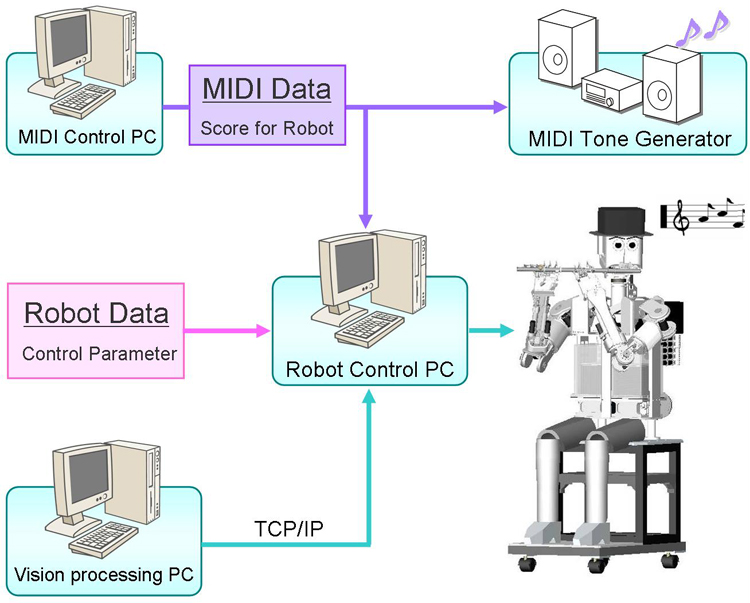
The MIDI accompaniment system of WF-4RVI consists of three computers to control the performance: one for controlling the robot, and another one to generate the accompaniment MIDI data, and the other one for processing the data from the CCD Cameras. These computers are connected by the MIDI system, and the synchronization of the performance is achieved by using the MIDI signal.
Performance Movies
|
"Ave Verum Corcus" performance by WF4-RVI |
|
"the flight of the bumble bee" performance by WF4-RVI |
Special Thanks
This research was conducted at the Humanoid Robotics Institute (HRI),
Waseda University. It was and is supported by a Grant-in-Aid for the WABOT-HOUSE Project by
Gifu Prefecture and the RT-GCOE Global Robot Academia of Waseda University.
WF-4RVI has been designed by 3D CAD software "SolidWorks".
Special thanks to SolidWorks Japan K.K. for the software contribution.
 |
|||
| Humanoid Robotics Institute, Waseda University |
Wabot-House Laboratory, Waseda University |
Global Robot Academia RT-GCOE of Waseda University |
SolidWorks Japan K.K. |
(c) 2011 Takanishi Laboratory