Japanese / English
 研究目的
研究目的
高西研究室では,人の心身のメカニズムを追及し,人間とロボットの共生を目指してヒューマノイドロボットの研究開発を行っています.その中で人間と情緒あるいは感性レベルでの交流ができることは,ヒューマノイドロボットにおける重要な機能のひとつであると考えています.そこで私たちはそのような場としての音楽空間に着目し,人間形フルート演奏ロボットの開発を行っています.
本ロボットは,フルート演奏時における人体各器官の働きを機械モデルで再現することで,人間のフルート演奏のメカニズム,表現力の高い演奏手法,および人間とロボットとの音楽空間におけるインタラクションを工学的視点に立って追求し,音楽を通じて人々に感動を与えることを目的としています.
人間形フルート演奏ロボットの研究は1990年に開始され,フルート演奏におけるさまざまな器官の働きを模擬した機械ハードウェアの開発と,MIDI伴奏同期システムの構築を行い,これまでにWFシリーズとして4体の人間形フルート演奏ロボットを開発してきました.また,演奏の表現力向上とロボットの自律性の向上を目指したフルート吹鳴音の自律探索の研究や,人間を模倣した演奏に関する研究,さらに教育支援ロボットとしての利用といった人間とロボットのインタラクションに関しても研究を進めています.

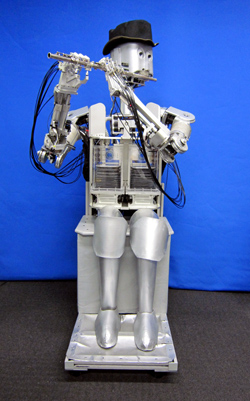
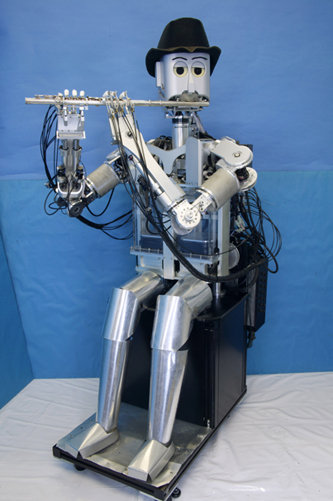
Wasada Flutist Robot の歴史
 |
 |
 |
 |
| WF-1 (1990) |
WF-2 (1992) |
WF-3RIX (2002) |
WF-4 (2003) |
 |
 |
 |
 |
| WF-4RIV (2007) |
WF-4RV (2010) |
WF-4RIV - Visual Interaction (2008) |
WF-4RIV - Visual Interaction (2009) |
WF4-RVIの概要
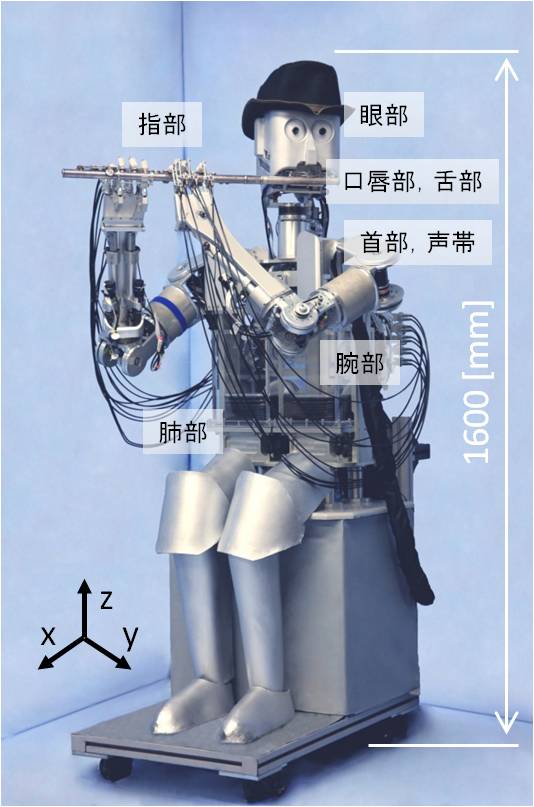
2010年に開発した人間形フルート演奏ロボット WF-4RVI(Waseda Flutist No.4 Refined VI)は,フルート演奏に必要な人体各器官の機能を再現した各部機構を備えており,全41自由度で構成されています.
 |
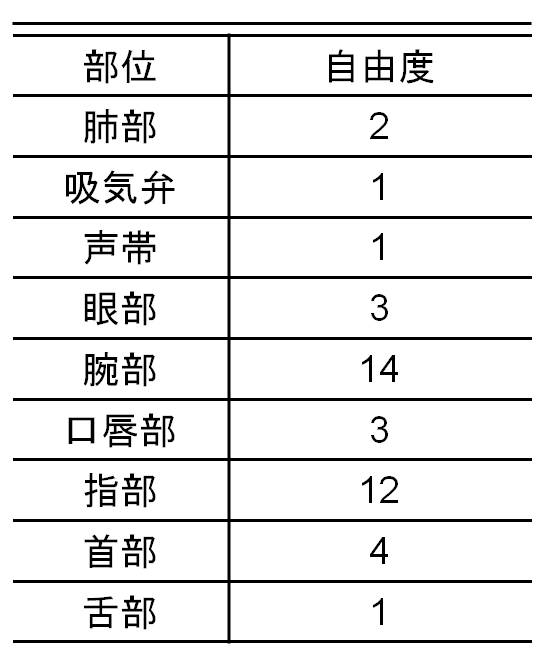 |
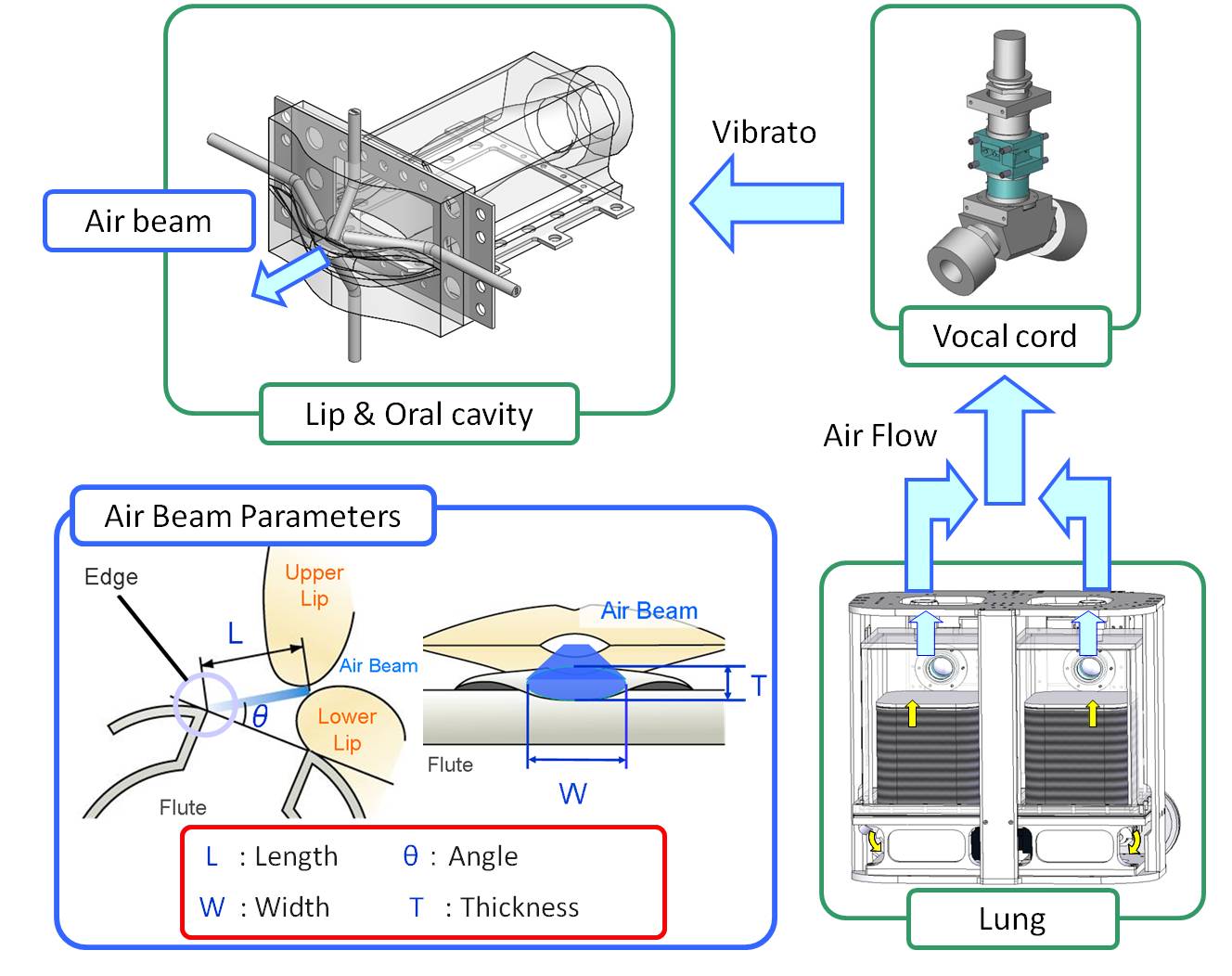
ロボットは,人間と同様のメカニズムによって,楽器を演奏しています.肺から送り出された空気は声帯部に送られビブラートの表現を付与します.そして,口腔部ではタンギングをおこない,口唇部で空気ビームの調整を行うことでフルートの演奏を実現しています.

|
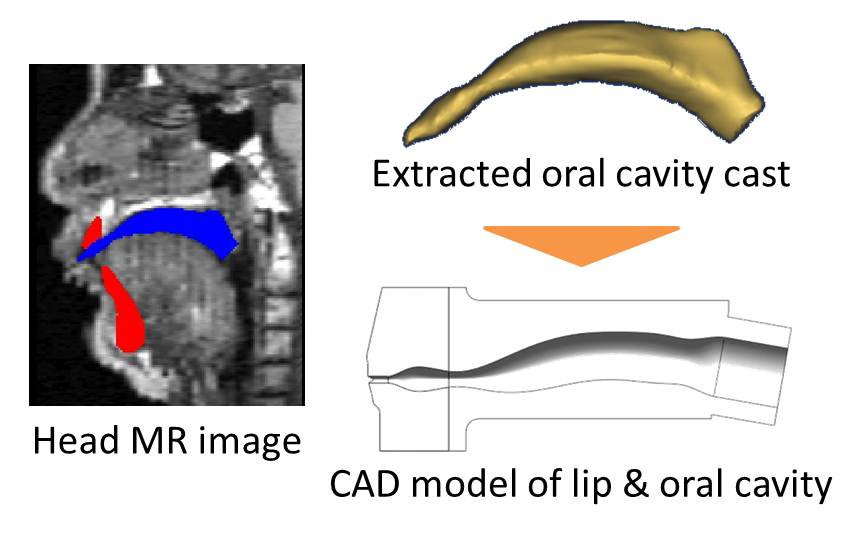
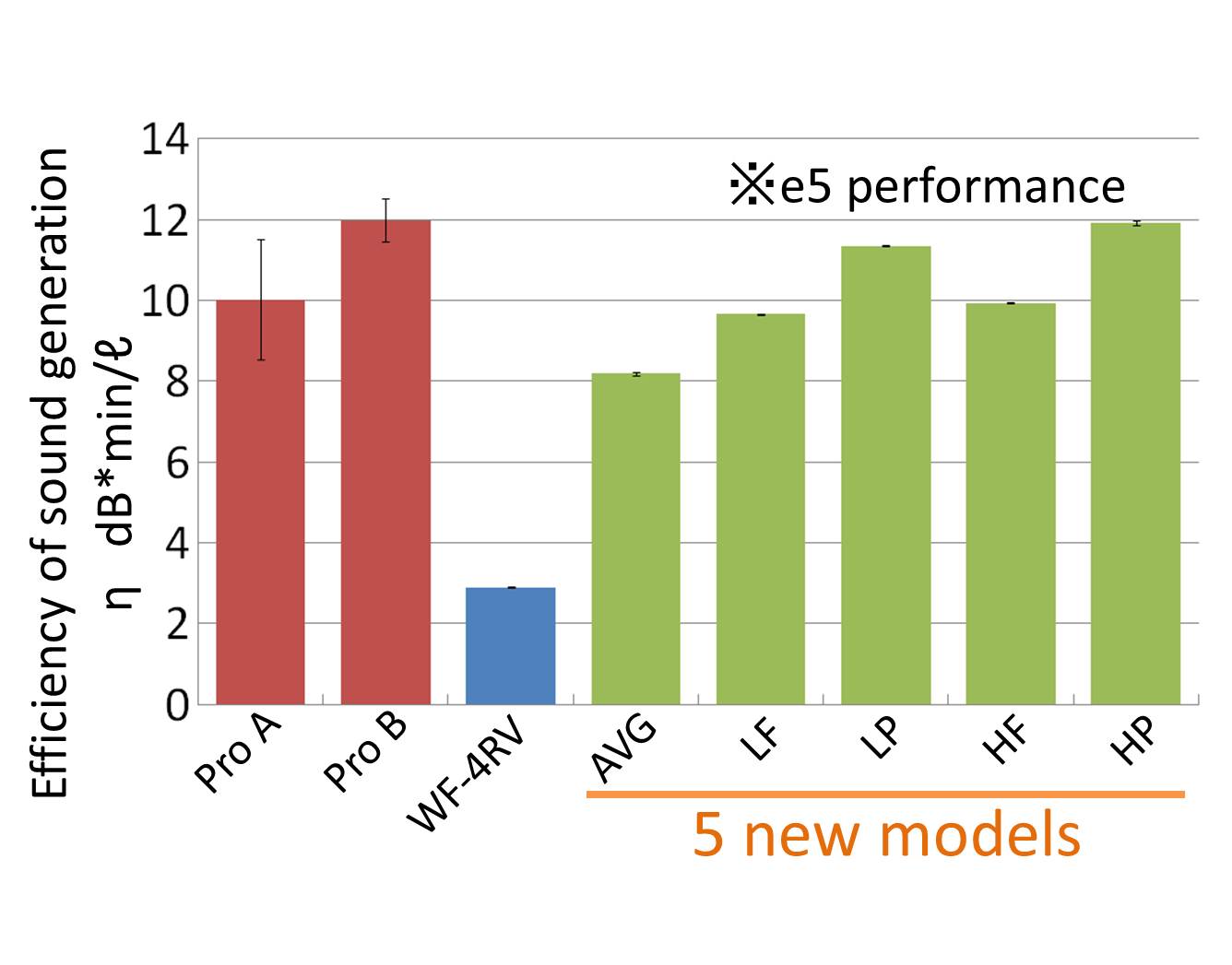
MRIを用いたプロ演奏家の頭部計測より,フルート吹鳴時における口腔形状を測定し,結果を基にプロ演奏家と同様の口腔形状を有する口唇・口腔を5種製作しました. | |
|
製作した5種の口唇・口腔では全てで呼気を吹鳴音に変換する効率,変換効率が向上し,一息でより長く大きな音量で演奏することが可能になりました. | |
|
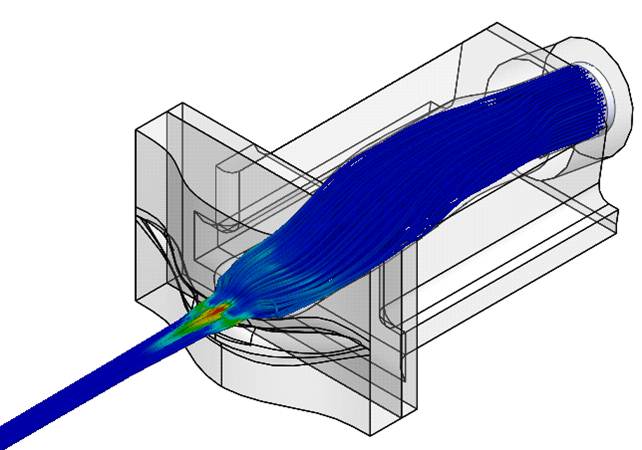
さらに,口唇・口腔のCADモデルに対し呼気流れのシミュレーションを行ったところ,変換効率は流体の渦度の変化と関連があることが示唆されました. |
演奏システム
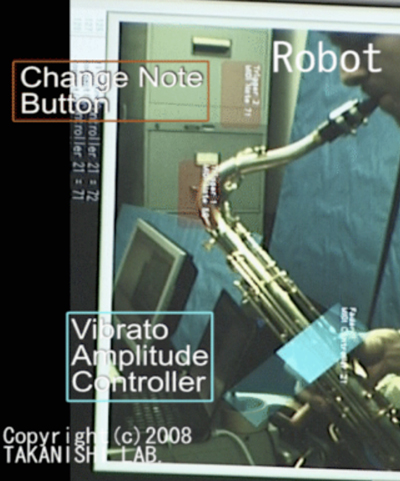
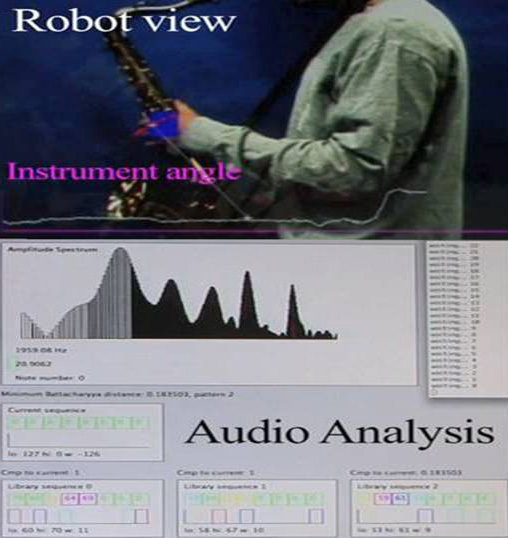
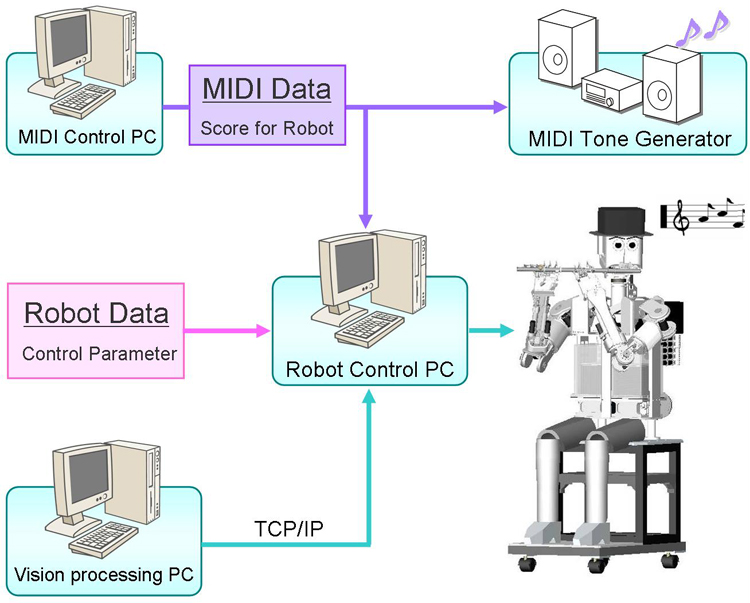
人間形フルート演奏ロボットWF-4RVIは,伴奏用MIDIデータの出力を行うMIDIコントロールパソコンとロボット制御用パソコンおよび画像処理用パソコンにより演奏を行っています.MIDIコントロールパソコンはMIDI音源への伴奏データを出力し,MIDI信号に同期してロボット制御パソコンがロボットの制御を行います.ロボット制御パソコンはロボットデータと呼んでいるデータを利用して演奏を行います.ロボットデータには各音名に対するロボットの制御パラメータが記録されています.また画像処理用パソコンではCCDカメラから取り込んだデータの処理を行います.
演奏ムービー
|
"Ave Verum Corcus" performance by WF4-RVI |
|
"the flight of the bumble bee" performance by WF4-RVI |
謝辞
本研究は早稲田大学ヒューマノイド研究所で,岐阜県からの委託であるWABOT-HOUSEプロジェクトとRT-GCOE Global Robot Academiaの援助のもと行われました.ここに感謝の意を表します.
WF4-RVIは3D-CADソフトウェア "SolidWorks" を用いて設計しました.本ソフトウェアを提供して頂きましたソリッドワークス・ジャパン株式会社にも感謝致します.
 |
|||
| Humanoid Robotics Institute, Waseda University |
Wabot-House Laboratory, Waseda University |
Global Robot Academia RT-GCOE of Waseda University |
ソリッドワークス・ ジャパン 株式会社 |
(c) 2011 Takanishi Laboratory