尋媶栚揑
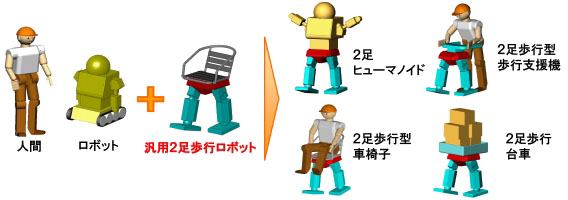
丂杮尋媶偱偼乽條乆側儘儃僢僩僔僗僥儉偺斈梡堏摦儌僕儏乕儖偲偟偰幚梡偵懌傞俀懌儘僐儌乕僞乿偺奐敪傪栚揑偲偟偰偍傝傑偡丏偙傟偼丆壓敿恎偺傒偱帺棫曕峴偑壜擻側俀懌曕峴儘儃僢僩傪杮尋媶偵傛傝採嫙偟丆巊梡幰偑偦偺梫媮偵墳偠偰忋敿恎傪壦憰偡傞偲偄偆傕偺偱偡丏椺偊偽丆儐乕僓乕偑偙偺儘儃僢僩偵忋敿恎偺傒偺恖娫宆儘儃僢僩傪搵嵹偡傟偽俀懌僸儏乕儅僲僀僪儘儃僢僩偑峔惉偱偒丆偦偺懠偺僔僗僥儉傪搵嵹偡傟偽戜幵偲偟偰棙梡壜擻丆偝傜偵偙偺儘儃僢僩偵恖娫偑忔傟偽忔傝暔偲偟偰傕棙梡壜擻偱偡丏傑偨尰抜奒偱嵟廳梫帇偟偰偍傝傑偡墳梡暘栰偼丆奒抜傗幬柺傪徃崀偱偒傞俀懌曕峴宆幵堉巕傗曕峴巟墖婡側偳暉巸暘栰傊偺墳梡偱偡丏
Waseda Leg Series
丂侾師帋嶌婡 WL-15

|
Waseda Leg
-No.15
( 2001-2002 )
徻嵶偼偙偪傜
|
|
丂俀師帋嶌婡 WL-16

|
Waseda Leg
-No.16
( 2002-2003 )
徻嵶偼偙偪傜
|
|
丂俀師帋嶌婡 WL-16R

|
Waseda Leg
-No.16 Refined
( 2003-2004 )
徻嵶偼偙偪傜
|
|
丂俀師帋嶌婡 WL-16RII

|
Waseda Leg
-No.16 Refined II
( 2004-2005 )
徻嵶偼偙偪傜
|
|
丂俀師帋嶌婡 WL-16RIII

|
Waseda Leg
-No.16 Refined III
( 2005-2006 )
徻嵶偼偙偪傜
|
|
丂俀師帋嶌婡 WL-16RIV

|
Waseda Leg
-No.16 Refined IV
( 2006-2007 )
徻嵶偼偙偪傜
|
|
丂俀師帋嶌婡 WL-16RV

|
Waseda Leg
-No.16 Refined V
( 2007- )
徻嵶偼偙偪傜
|
|
Waseda Shoes Series
丂僙儈傾僋僥傿僽巟帩懡妏宍妋曐婡峔
WS-1 & WS-1R

|
Waseda Shoes
-No.1 &
No.1丂Refined
( 2003-2005丂)
徻嵶偼偙偪傜
|
|
丂幵椫幃懌晹婡峔丂WS-2

|
Waseda Shoes
-No.2
( 2003-2004 )
徻嵶偼偙偪傜
|
|
丂僀儞儔僀儞僗働乕僩宆懌晹婡峔 WS-3

|
Waseda Shoes
-No.3
( 2003-2004丂)
徻嵶偼偙偪傜
|
|
丂儘乕儔乕僗働乕僩宆懌晹婡峔 WS-4

|
Waseda Shoes
-No.4
( 2003-2004 )
徻嵶偼偙偪傜
|
|
丂僙儈傾僋僥傿僽巟帩懡妏宍妋曐婡峔
WS-5

|
Waseda Shoes
-No.5
( 2005-丂)
徻嵶偼偙偪傜
|
|
幱帿
杮尋媶偼憗堫揷戝妛僸儏乕儅僲僀僪尋媶強偺傕偲偱丆
姅幃夛幮俿俵俽倀俲丆
僸乕僴僀僗僩惛岺姅幃夛幮丆
僜儕僢僪儚乕僋僗僕儍僷儞姅幃夛幮 偺弌帒丆偛嫤椡傪偄偨偩偄偰偄傑偡丏
杮尋媶偵偛嫤椡偄偨偩偄偨偙傟傜偺婇嬈偵偙偺応傪庁傝偰姶幱偺堄傪昞偟傑偡丏
杮尋媶偺榑暥儕僗僩偼
偙偪傜
傪偛嶲徠偔偩偝偄丏